无线定位技术浅析
2021-10-12周静杨新章
[周静 杨新章]
1 引言
无线定位是指利用测量设备及无线信号,计算未知终端的地理位置的过程。未知位置的终端可以是手机、车辆、飞机、船舶、智能穿戴设备等终端设备;测量设备及发射端可以是卫星、蜂窝基站、WiFi 热点、蓝牙信标等发射无线信号的设备;与测量设备相对应,无线信号包括卫星信号、无线蜂窝信号、WiFi 信号和蓝牙信号等。
无线定位技术可以追溯到上世纪五六十年代[1],卫星技术发展出了GPS 导航,为飞机、船舶等提供导航及定位服务。上世纪九十年代,3GPP 会议召开并制定了无线蜂窝的定位服务协议[2],不同研究者提出了以到达时间、到达时间差、到达角测量等方法在内的无线蜂窝定位技术,也提出了使用GPS 为无线蜂窝的定位提供辅助。随着各种技术的进步,又陆续提出了蓝牙定位、WLAN 定位、传感器定位等不同的定位技术,实现移动终端的定位服务。5G 基站密度更高,支持海量连接,为无线定位提供了新的技术支持,同时自动驾驶、室内导航等5G 应用也对定位技术在精度、实时性等方面提出了更高的要求和挑战。
随着人工智能(AI)技术的发展,以AI 为基础的无线定位方法也出现在各类应用中,在传统的定位方法基础上使用AI 技术消除模糊、提升精度,可达到更好的定位效果。基于AI 的5G 定位技术具有广阔的应用前景。
2 无线定位技术概览
不同的无线定位方法,依赖于不同的定位原理及不同的物理载体设备。一般情况下,无线定位方法的实施方案为:(1)若干个有真实坐标的基站、卫星或者蓝牙信标等物理设备,发射无线信号用于测量未知终端,锚定所使用的地理坐标系;(2)测量信号发射端与未知终端之间的无线信号在传输过程中产生的差异,例如功率差、时间差、场强差、角度差等。所使用的无线信号包括但不限于卫星信号、无线蜂窝信号、WLAN 信号、蓝牙信号;(3)根据第二步的测量结果,计算出移动终端在对应地理坐标系中的坐标。
综上,无线定位方法通过一些可辨识、可区分的特点,例如距离、距离差、场强、角度等等,区分出不同的移动终端,再根据其中的信号差异或时间差异,计算出移动终端的位置。大体上,无线定位技术的原理可以分为距离、距离差、角度、信号场强等四种,以下对这四类方法进行简要介绍。由于无线定位技术主要面向移动通信,本文重点描述基站作为信号发射端或接收端的场景。
2.1 基于距离的无线定位方法
基于距离的无线定位方法主要是根据无线信号从基站出发到达用户设备的时间(或从用户设备到达基站的时间)乘以光速得到用户设备和不同基站之间的距离,然后根据圆心公式(或球心公式)计算出用户设备位置。距离方法一般需要严格的时间同步,是最早出现、最为常用的一类方法。3GPP 先后从算法、测量手段、辅助设备等维度引入各种定位方法。
(1)定时提前TA:在手机接入基站的过程中,基站利用上行PRACH 得到UE 的大致距离,计算出定时提前参数TA,可用于估计移动设备到基站的大致距离[2,3,4,11]。在定时提前方法的基础上,3GPP 又衍生出了多向定时提前方法[11]。
(2)到达时间TOA:基站接收移动终端发出的信号并测量信号到达时间,计算出基站与移动终端之间的距离,从而估算移动终端的地理坐标。03.71 协议描述了该方法。
(3)基于NR 信号的多往返时间定位:38.305 协议中提出利用移动终端测量的从多个TRP 接收的辅助数据,测量gNB 的时间差,基于往返时间计算移动终端的位置[10]。
(4)GPS 定位:通过在移动终端增加GPS 接收机实现定位。A-GPS 定位、D-GPS 定位和A-GNSS 定位都属于GPS 定位的变种。A-GPS 在 03.71 协议中提出,将网络中的辅助数据传输到移动终端,以提高GPS传感器的性能、定位精度并减少捕获时间[4]。D-GPS 在25.847 协议中提出,在网络中添加已知坐标的基准接收机并对自身实施定位以获取公共误差,用公共误差对移动终端的定位结果进行调整。A-GNSS 在43.059 协议中提出,可使用的卫星系统包括GPS、伽利略、卫星增强系统(SBAS)、准天顶卫星系统(QZSS)和北斗导航卫星系统(BDS)等。
(5)CELL-ID 定位:直接获取移动终端用户所在的蜂窝小区ID,将蜂窝小区ID 对应的地理位置信息作为该移动终端的位置[7]。25.305 协议提出了增强小区ID 方法,使用一些额外辅助信息(如定时提前TA、到达角AOA 等)辅助定位。TA 可以用于计算UE 到基站的距离,将UE 的坐标缩小到距离服务基站距离为TA*光速的带状区域上。AOA 可以将UE 的未知限制在个比原始扇区更窄的扇形区域。在5G 网络中,该方法为基于NR 信号的NR 增强小区识别方法(NRE-CID),使用gNB 测量值改进移动端定位效果。这些测量值包括SS/CSI/E-UTRA 参考信号接收功率/接收质量[10]。
(6)辅助定位:3GPP 还定义了通过气压传感器、运动传感器以及地面信标系统来增强定位精度。25.305 协议提出利用气压传感器,确定移动终端的垂直高度;气压法需要与其他定位方法相结合,确定移动终端的三维位置。25.305 协议也提出可以使用地面信标系统(TBS)定位移动终端;该系统由地面发射机组成,当前主要是城市信标系统MBS[7]。36.305 协议提出利用加速度计、陀螺仪、磁强计等不同的传感器来计算位移。移动终端基于参考位置和/或参考时间估计相对位移,发送包含所确定的相对位移的报告,确定移动终端的绝对位置。
2.2 基于距离差的无线定位方法
基于距离差的无线定位方法的主要原理为:获取一对基站的信号到达用户设备的时间差,根据“到两定点的距离为定值的动点是一条双曲线”的几何原理,绘制出两条对应的双曲线;取若干对双曲线的交点,消除误差,即为未知移动终端的位置。与距离方法不同,距离差方法一般不需要严格的时间同步。距离差方法大体上可归纳为到达时间差TDOA 和观测时间差OTD 两类。
(1)到达时间差TDOA:测量基站和移动终端之间,无线信号到达的时间差,乘以光速得到距离差,依据几何原理绘制若干条双曲线,取交点即为移动终端的位置。一般情况下,使用上行到达时间差U-TDOA,由三个或以上的基站测量终端信号[11]。在5G 网络中,TDOA 亦分为上下行两种,即DL-TDOA 和UL-TDOA。
(2)观测时间差OTD:GSM 标准规定移动台对观测到达时间差进行测量,减去基站之间的时基差,计算终端的位置[5,13]。该方法的原理和TDOA 基本相同,某些文献将其表述为TDOA 的一种[13]。基于OTD 有各种衍生方法:多向观测到达时间差方法,计算移动端附近一组基站相对于服务基站的观测到达时间差,并上报给服务基站[11]。增强观测时间差E-OTD,用移动端中已有的时间测量功能,实现定位并提升精度[13]。
(3)观测到达时间差OTDOA:在3G 中,OTD 发展为OTDOA,UE 测量多个基站的下行链路信号,计算出信号到达不同基站的的时间差及相应的距离差,推算出移动设备的位置。3GPP 协议主要提及了三种基于OTDOA的方法:①OTDOA-RNBP,在OTDOA 的基础上,选择一些参考点为定位提供辅助测量结果[8]。② OTDOA-PE,在OTDOA 的基础上,基站附近的定位元件PE 发射无线信号,终端测量这些信号[8]。③OTDOA-IPDL,在OTDOA的基础上,在一个很短的时间间隔内关闭服务基站的所有下行信号发射,提高UE 检测到其他基站信号的概率[7]。
TDOA 及其衍生方法在移动终端测量或者基站位置测量信号。OTD/OTDOA 及其衍生方法一般由终端测量信号[7]。两类方法的定位原理(双曲线法/距离差)基本相同。
2.3 基于角度的无线定位方法
基于角度的无线定位方法的原理为,发射端或者接收端改造为天线阵列,使发送或接收的无线信号在不同天线之间产生一定的相位差,计算信号到达角或者脱离角;再根据三角形的相关几何原理计算出未知设备的位置。角度方法一般包括到达角AOA 和脱离角AOD。
(1)到达角定位AOA:该方法需要接收端为天线阵列,利用不同天线接收到的信号形成的相位差,计算到达角,并确定用户位置。到达角分为水平方向的方位角和垂直方向的天顶角,需要分别测量[8]。5G 中AOA 称为基于NR 信号的上行到达角UL-AOA[10]。
(2)脱离角定位AOD:该方法的原理与到达角相反,需要将发射端改造为智能天线阵列,每根天线将产生一个相位差;根据相位差可以计算出脱离角,估算未知移动端的地理坐标。5G 中AOD 称为基于NR 信号的下行脱离角DL-AOD[10]。
另外,角度方法也可用于WLAN、蓝牙定位(如表2所示)。
2.4 基于场强的无线定位方法
基于场强的无线定位方法,是根据空间中的某一位置接收到的不同信号的场强建立相应的数据库,移动终端根据当前测量值进行匹配,从而得出移动终端的大致位置。场强方法主要包括场强指纹定位和信号传播模型定位方法,多见于蓝牙、Wifi 等信号,主要用于室内定位、短距离定位。
(1)场强指纹定位(主要包括蓝牙、WLAN、UWB等):
①蓝牙RSSI。蓝牙RSSI 定位方法,需要移动终端接收并测量来自蓝牙信标的信号,根据采样点建立的参考数据库,未知移动终端的地理坐标[6,7,10]。
② WLAN RSSI。WLAN RSSI 定位方法,需要移动终端测量来自WLAN 热点的信号[6],移动终端与存储采样点的数据库进行比较,得到地理坐标[6,7,10]。
③信号传播模型定位:该方法对无线信号在室内范围的传播衰减模型进行研究,生成定位区域的无线信号分布。移动设备在测量到若干信号值后,和指纹模型进行比较,计算出自己当前的位置。该方法一般用在蓝牙系统中。
3 无线定位技术比较分析
3.1 无线定位技术分类
如上文所述,无线定位方法可以根据定位原理,分为距离、距离差、角度和场强四类方法。上述不同类型的定位方法主要区别在于信号类型、信号发射方式以及信号检测设备的差异。此外,场强方法需要采样。
表1 列举了按照定位原理划分的无线定位方法。
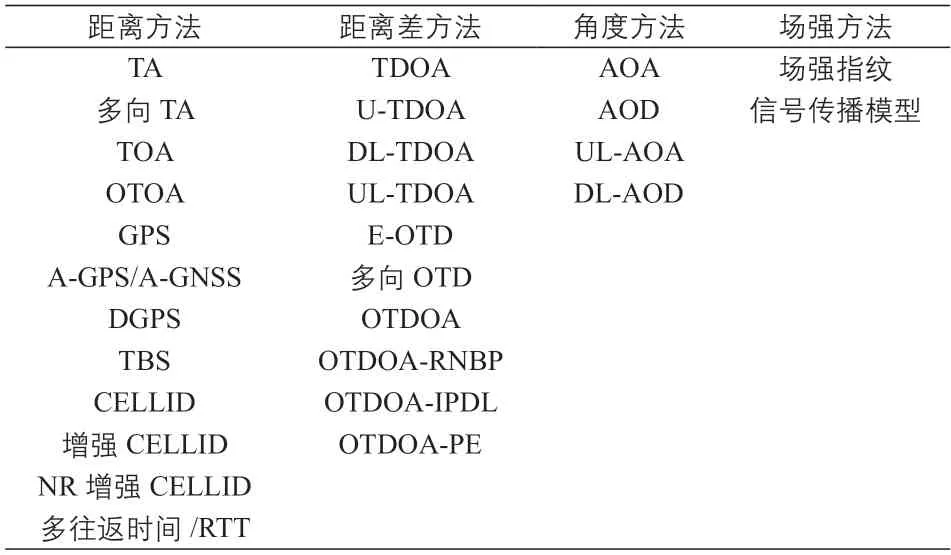
表1 按照定位原理划分
上述无线定位方法,可以在不同的物理载体上实现,但略有一些区别。例如,卫星定位通常使用GPS 接收机,不使用TA 定时提前;无线蜂窝网络使用小区ID 识别,WLAN 使用接入点识别,等等。一些定位方法可以跨物理载体使用,例如TDOA、AOA,可以用在无线蜂窝网络[11]、蓝牙系统[34]和WLAN[30]。一些定位方法不能跨物理载体使用,例如不能在卫星上使用CELLID 方法,因为卫星不划分CELLID。
根据物理载体的不同,无线定位方法可以划分为:(1)无线蜂窝定位方法;(2)卫星定位方法;(3)WLAN定位方法;(4)蓝牙定位方法;(5)传感器定位方法;(6)其他定位方法,如UWB、红外定位、Zigbee 定位等等。如表2 所示。

表2 按照物理设备划分
大多数情况下,无线蜂窝网络的基站到用户设备的距离较远,一般使用TDOA、E-OTD 等定位方法[2,12]。而蓝牙等窄带信号在TOA 或者TDOA 上的表现不佳[32]。另一方面,WLAN、蓝牙等设备与用户设备的距离较近,常用到达角[30]、脱离角[34]、场强指纹[28]等方法。卫星距离移动设备的距离比基站更远,一般会作为无线蜂窝网络的辅助。传感器设备一般不单独用于定位,和其他定位方法结合在一起,用于确定设备的三维坐标[9]。
一般情况下,CELL-ID 定位精度比其他定位算法要低。传感器、场强指纹、到达角等方法,可以有更高的定位精度。终端和发射端之间的几何位置关系,对定位精度有一定影响[39]。
表3 列举了部分定位方法在实现时的精度。

表3 定位精度
3.2 无线定位技术演进
无线定位技术的发展经历了三个阶段:(1)上世纪九十年代末期到本世纪初期,常用以定时提前、到达时间、观测到达时间、观测到达时间差为基础的无线蜂窝定位技术,GPS 卫星定位技术作为辅助。(2)本世纪初期到5G出现之前,随着其他无线技术如蓝牙、WLAN、UWB 等技术的进步,出现了一批以蓝牙、WLAN、UWB、地面信标系统、传感器等为物理载体的无线定位方法,与无线蜂窝定位技术相互配合,实现移动终端的定位。(3)从5G 网络出现至今,出现了一批以5G NR 为基础的无线定位技术,如增强Cell-ID、UL-TDOA、DL-AOD 等方法。早期的无线定位技术,例如TOA、TDOA、GPS,多使用单一方法实现移动终端的定位。随着WLAN、蓝牙、无线蜂窝技术的发展,出现了网络辅助的A-GPS 方法、基于参考点的OTDOA-RNBP 方法、气压定位或者运动传感器定位方法等等。这些方法多使用辅助设备,配合无线蜂窝基站进行数据测量和计算。
如图1 所示,在无线定位技术发展的早期,出现了TA、TOA、GPS、CELLID、TDOA 等技术,多用于GSM系统。在这一时期,以无线蜂窝技术为主。随着时代的发展,又衍生出了A-GNSS、E-CID、OTDOA 等,以及以气压法为代表的传感器定位技术,以AOA 为代表的角度定位技术和以RSSI 为代表的场强定位技术,用于3G 网络。在这一时期,WLAN、蓝牙等技术开始用于无线定位。4G时代大体上沿用了3G 时代的无线定位方法,略有增强。5G 网络架构与4G 有区别,衍生出了一系列以NR 为基础的无线定位方法。
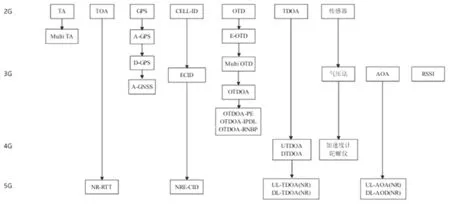
图1 无线定位算法趋势图
4 无线定位算法实现方案
4.1 传统的定位实现方法
传统的无线定位方法,根据上述定位原理有距离、距离差、场强、角度四类,每一类方法又有不同的实现方案。按照实现方案的类型,可以划分为:(1)解方程直接实现;(2)拟合/回归;(3)分类/聚类;(4)概率统计。
4.1.1 解方程法
第一类是根据定位原理,构造方程(组)并使用不同方法求解,例如文献[35]提出了一种基于TA 和PMI 值的用户定位方法,根据TA计算出UE和基站天线之间的距离,根据PMI 计算出UE 和基站天线之间的夹角,对UE 进行定位。文献[39]提出了一种利用多站TDOA 信息进行定位的非线性方程组求解方法,不需要进行迭代运算,直接求解。文献[43]提出了一种基于特征值重构的到达角方法,重构信号协方差矩阵,进行特征值分解、估计信号的波达方向,实现终端的定位。上述方法涵盖了TA、TDOA、AOA 等无线定位方案。
4.1.2 拟合/回归方法
第二类是拟合/回归方案。其中,拟合法包括最小二乘、泰勒级数展开、拟牛顿法等;回归方法包括线性回归、非线性回归等。这些方法可以使用AI/非AI 的技术实现,本小节仅讨论后者。例如,文献[16]提出了一种基于广义互相关和多项式拟合的TDOA 时延估计方法,将时延精度推进到亚采样点级。文献[36]提出了一种改进的Mean-OTDOA 算法,将终端和多个基站的测距结果的平均值作为参考距离,利用泰勒级数展开法对终端位置进行估计。文献[37]提出了一种基于线性回归和最小二乘的TOA 方法,用线性回归估计距离误差和真实距离之间的关系,运用最小二乘对终端进行定位。文献[41]提出了一种基于线性回归分析的定位方法,结合信号衰减模型和线性回归理论,修正锚节点的测距模型,提升定位精度。文献[42]使用多项式拟合方法,解决GPS定位中的高程拟合问题。文献[46]提出了一种WiFi-RTT 定位方法,利用半参数方法构造WiFi-RTT定位的观测模型和随机模型,并进行了可靠性验证。文献[47]提出了一种线性加权的Cell-ID 方法,通过信号强度获得各个基站的权重,对终端进行定位。文献[53]提出了一种RSSI 定位的求解方法,将最小二乘法和无约束拟牛顿法相结合,求解未知终端的坐标。文献[54]提出了一种三位总体最小二乘节点自定位方法,利用总体最小二乘法TLS 减小误差,进行广义特征值分解并计算方位角和俯仰角,对终端进行定位。文献[55]提出了一种新的定位方法,在观测值为到达时间差、到达角和脱离角时,使用基于观测函数线性化的一阶泰勒级数迭代法进行定位。上述方法表明,TOA、TDOA、OTDOA、RSSI、GPS、RTT、CELL-ID、AoA 等绝大部分无线定位方法,可以用拟合/回归方法实现。
4.1.3 分类/聚类方法
第三类是分类/聚类方法,可以使用AI/非AI 的方法实现,本小节仅讨论后者。例如,文献[45]提出了一种基于信号强度与空间划分的室内WiFi 接入点定位方法,首先采集WiFi 信号,将目标AP 所在区域分为四个区域,以二分法确定参考点,确定信号强度相对关系最大值,重复上述步骤直到定位达到期望阈值。其他的分类/聚类方法,将在4.2 小节中讨论。上述方法表明,分类/聚类在Wi-Fi 等定位方法中,是一个行之有效的解决方案。
4.1.4 概率统计方法
第四类是概率统计的方法,包括但不限于极大似然估计、概率密度计算等等。例如,文献[14]提出,在OTDOA 的测量中可以使用极大似然估计,并设计了三种方法估计信号的第一到达路径,满足各种实际移动信道下的3GPP 要求。文献[38]提出了一种基于特征值融合的TOA 方法;该方法根据先验信息,对获取的不同天线的TOA 测量值进行卡尔曼无偏滤波、卡尔曼有偏滤波,实现误差判别和误差抑制,提升定位精度。文献[52]提出了一种特征值融合的RSSI 定位方法,在RSSI 的概率分布特征基础上,进行RSSI 不同信号特征值融合,实现定位精度优于传统的均值指纹定位算法。文献[27]提出了一种基于概率密度的WLAN 接入点定位方法,根据定向天线接收到的不同信号强度,计算接入点落在不同区域的概率,形成概率统计表并进行位置估计。上述方法表明,TOA、OTDOA、RSSI、WLAN 接入点等无线定位方法中,概率统计方案能发挥出一定的作用。
表4 给出了一些传统的无线定位算法实现方案。
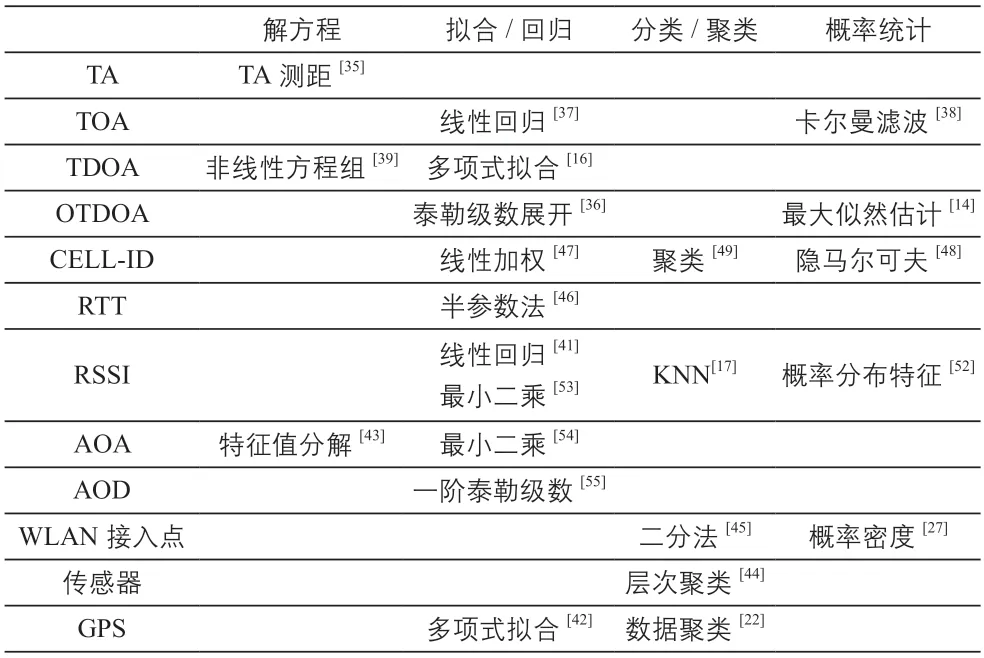
表4 按照实现方式划分
4.2 基于人工智能的无线定位实现方案
随着人工智能的发展,以机器学习为主的人工智能技术,在无线定位技术中得到广泛的应用。一般情况下,人工智能的解决方案如下:(1)根据原始的无线定位方法,获取相应数据。例如,TA 方法需要获取定时提前数据,AOA 方法需要获取到达角数据,TOA/TDOA 方法需要获取测距结果。(2)根据需要解决的问题特点,选择合适的人工智能方法。例如RSSI 场强指纹定位需要匹配数据库,适合使用分类方法。TOA/TDOA 的原理是圆/双曲线方程,适合使用回归方法。一般情况下,人工智能方法由于直接使用训练数据,可以同时拟合阴影效应、多径效应等复杂的应用场景。(3)获取结果坐标。
图2 描述了基于AI 的无线定位流程。

图2 基于AI 的无线定位流程
上述流程图中,样本数据是指可用于训练的数据样本,例如RSSI 定位方法需要测量某个点的若干个信号场强,形成场强指纹;那么一个场强指纹就是一个训练样本。其余方法以此类推。上述标签是机器学习中的概念,在无线定位方法中,标签通常是指某一条训练数据是否具有准确坐标值。例如,如果一个RSSI 训练样本,同时具有若干个信号形成的场强指纹和这一处的准确坐标,则它是一个带标签的训练样本。如果只有若干个信号形成的场强指纹,则是一个不带标签的训练样本。
绝大多数基于AI 的无线定位方法都使用带标签的样本进行训练。只有少数聚类方法不使用带标签的数据。在实际应用中,可以轻易获取大量带标签的训练数据。如果需要获取较高的精度,也应当使用带标签的数据,进行大量训练。
包括支持向量机、分类/聚类、神经网络等AI 方法在内,均可用于实现无线定位方案。例如,文献[12]提出在波束形成的指纹上使用神经网络,可以实现单锚定位。根据移动设备目标应用程序的不同,还可以使用跟踪技术(利用短期历史数据)来增强定位。该方案主要用于室外定位场景,平均估计误差稳定在1.78 m 以下。文献[15]提出了一种基于遗传神经网络的到达角定位方法,用于非视距传播环境。遗传神经网络主要用于对AOA 测量值进行修正,以最小二乘法确定移动台的位置。文献[17]在传统室内指纹定位方法的基础上,优化了指纹数据库并进行聚类管理,减小了在线定位时查找信息的计算量。文献[18]提出了一种定位方法,使用BP 神经网络取代传统方案,建立测距模型,以消除对环境的过度依赖,适应不同的环境。结果表明该方法的性能优于经典算法,获得了更高的定位精度。文献[19]利用SVM 优化径向基神经网络RBF 的网络权值、阈值和结点数,将训练后的神经网络用于TDOA 定位,结果表明该方法的精度高于Chan 算法和Kmeans 聚类。文献[20]提出了一种免标定、无监督的信号差比(signal strength difference ratio)解决方案,将信号指纹特征去线性处理,考虑接入点的影响,使用一个包含两个隐层、Softmax 函数的神经网络,将传统的基于信号强度和欧式距离的定位方案,提升了10~20%的精度。文献[21]提出了一种基于机器学习的信息论位置验证系统,可以在不知道信道参数的情况下,适应不断变化的环境,对车辆进行定位。同时,该方法在遭遇恶意车辆的位置欺骗攻击时,也具备有效性。文献[22]提出了一种无监督机器学习的数据聚类方法,将测量数据分为视距信号和非视距信号,剔除非视距数据,采用泰勒级数展开迭代法计算终端坐标,有效地减小了非视距误差对测量结果的影响,平均定位精度由传统方法的10 km 提高到0.7 km,收敛时间由400 s 缩短到250 s。文献[23]提出了一种基于神经网络的传感器位置估计方法,以移动终端接收到的信号强度指标(RSSI)和锚点传感器ID 作为输入,位置信息作为输出,训练神经网络。该方法比基于质心(CL)和普通神经网络的方法,提升了约30%的精度。文献[44]提出了一种气压计辅助Wi-Fi 楼层定位的方法,包含两阶段的聚类:基于气压计的层次聚类和基于Wi-Fi的Kmeans聚类,利用Wi-Fi 和气压计读数组成气压指纹,在不了解Wi-Fi基础设施的时候可以提供定位服务。文献[48]提出了一种基于小区标识的定位算法,利用移动台检测到的所有小区id(服务或非服务),以隐马尔可夫模型(HMM)对用户运动和测量数据进行统计建模,利用HMM 滤波器的后验概率,采用最大后验估计准则进行定位决策。结果表明,基于HMM 的CELLID 定位优于经典方法。文献[49]提出了一种自适应增强CELLID 方法,首先对高精度测量值进行聚类,高精度测量值包括辅助GPS 测量、无线接入承载、往返时间等;其次,根据聚类结果计算相应的CELL 多边形,每一个多边形包含相同的置信度,确保建模时CELL多边形内部的概率一致;请求定位时,该方法检测相邻小区,检索并发送相应的CELL 多边形,以实现定位功能。实验结果表明该方法的定位效果优于传统方法。文献[50]的研究表明,WiFi-RSSI 建模是室内WiFi 指纹定位方法的关键因素。前向人工神经网络可以方便地对WiFi-RSSI 值进行建模(基于指纹数据库)。在人工神经网络中,采用ReLu 或tanh 激活函数,并由sgd 或adam 训练的神经网络,具有较高的定位精度。文献[56]提出了一种融合多种测量数据的神经网络,解决了常规定位算法中使用线性最小二乘法求解非线性方程导致定位精度下降的问题。神经网络融合的测量数据包括:到达时间(TOA),到达时间差(TDOA),到达角(AOA)。
综上所述,支持向量机、神经网络的AI 方法,可有效提升无线定位方法的定位精度、修正测量误差、减少多径效应的负面影响,处理各种复杂环境下的移动设备定位问题(如欺骗攻击[21])。目前,基于AI 的无线定位方案,多见于TDOA、AOA、RSSI 等无线定位方法。
在实际应用过程中,包括神经网络、聚类等方法,更适用于大规模用户的定位方案。随着通信技术的进步,5G将带来更多的应用场景,例如智能穿戴设备、车联网等,将对无线定位方法带来更大的挑战。
5 结束语
无线定位技术发展出了以无线蜂窝、卫星、WLAN、蓝牙、传感器等不同物理设备上使用的定位方法,设计出了TOA、TDOA、AOA、OTDOA、RTT、GPS 等一系列定位方案,以及包括人工智能在内的一系列不同的实现方法。
在2G~3G 时代,一般使用基于距离/距离差的无线蜂窝定位技术,辅以GPS 定位技术。在4G 时代,随着WLAN、蓝牙、传感器等技术的发展,无线定位技术开始引入WLAN、蓝牙等功能,并通过各种方法提升测量精度和定位精度。5G 时代,基于gNB 信号的无线定位方法开始出现,获得进一步提高,也同时出现了一些新的应用场景及需求。
随着人工智能技术的进步,以机器学习为代表的AI方法开始用于无线定位技术,主要用于提升精度、提升运行效率和效果,弥补原有定位方法的不足。
