高分辨率可视穿刺针光学系统的设计与研制
2021-10-10陈新华罗宗平杨惠林赵知诚沈为民
陈新华,罗宗平,杨惠林,赵知诚,沈为民
(1.苏州大学光电科学与工程学院教育部现代光学技术重点实验室,江苏苏州215006;2.苏州大学光电科学与工程学院江苏省先进光学制造技术重点实验室,江苏苏州215006;3.苏州大学医学部,江苏苏州215006)
1 引 言
穿刺是一种常用的医学诊疗技术,即利用细长的穿刺针穿入人体组织进行检查或治疗。长期以来,在穿刺手术中难以实时获知穿刺位置,因此手术的成功与否主要依赖于医生的临床经验。为了解决穿刺过程中的定位问题,X光透视、超声引导以及CT三维重建导航等辅助定位技术应运而生。这些技术显著提高了穿刺过程中的定位精度,但或多或少地存在一些缺点,譬如:X光透视技术需要在术中进行X光透视,患者和医生会受到一定剂量的电离辐射[1];超声引导技术将超声探测和穿刺技术配合使用,定位精度还有待进一步提高[2];CT三维重建导航利用CT扫描人体后生成的三维图像来指导穿刺,与手术时体内环境还存在一定的差异[3]。为了能够更加直观、精确、安全地进行穿刺手术,近年来研究人员提出了可视化穿刺的概念,即将光学成像系统和传统穿刺针结合在一起,实现“边穿刺,边观察”。德国铂立可视穿刺针式肾镜是目前国内临床应用较多的一款可视穿刺针,有效避免了误穿和组织器官损伤,极大地提高了手术成功率[4]。在骨科方面,苏州大学管喆恒等人开展了可视化穿刺技术在骨科椎弓根穿刺手术中的应用研究[5]。
光学系统是可视化穿刺针中的一个重要组件,用于穿刺过程中场景的观察。与传统医用内窥镜相比,穿刺针光学系统具有更小的外形尺寸。用于椎弓根穿刺手术中的穿刺针直径一般小于4 mm,不锈钢针管内部还需要安装抽水管、冲水管及照明LED等部件,因此要求光学系统的最大外形尺寸要小于2 mm,这对设计、加工和制造提出了极大的挑战。此外,为了实现穿刺过程中的高精度定位,可视穿刺针光学系统还需具有高空间分辨率,能够实现清晰成像。综合相关文献报道可知,物方空间分辨率大于16 lp/mm的内窥光学系统,可视为高分辨率成像系统[6-7]。本论文设计研制了一款用于高分辨率可视穿刺针的光学系统,能够安装在管径为3~4 mm左右的穿刺针内,实现穿刺过程中的清晰成像。论文分为3个部分:首先讨论确定高分辨率可视穿刺针光学系统指标和初始结构参数;然后进行优化设计,并研制该光学系统;最后对装配完成的可视穿刺针光学系统进行MTF测试和成像试验。
2 指标分析和结构参数计算
图1 为椎弓根穿刺用的一种管径为4 mm的穿刺针,材料为不锈钢,穿刺针前端为倾斜45°的刃面,其中1为光学系统,2为进水管,3为出水管,在光学系统旁装有照明光纤束(图中未画出)用于穿刺过程中的场景照明。光学系统所成的像可以通过Hopkins棒镜构成的中继系统引出后用目镜观测或利用图像探测器获取,也可以将图像探测器直接安装在光学系统像面处,将所成的像直接转化为电信号引出。本文研制的可视穿刺针采用第二种方法,选用微小型CMOS探测器作为图像探测器。
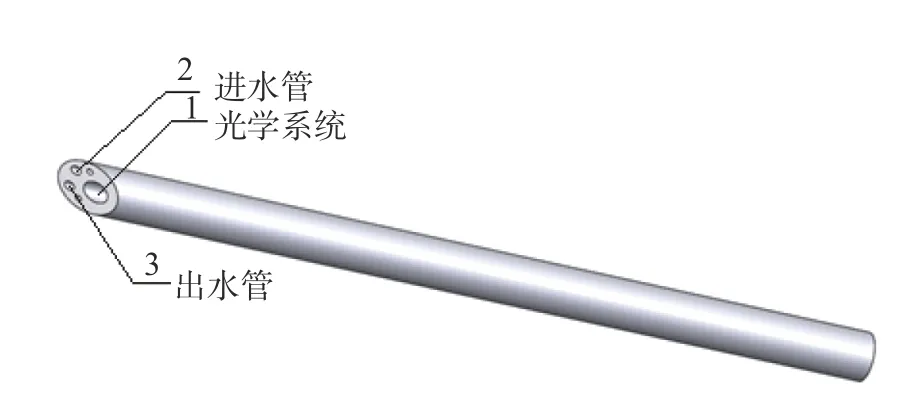
图1 可视穿刺针的外观图Fig.1 The appearance of the visual puncture needle
为使光学系统的光轴垂直于穿刺针的倾斜刃面,视向角取45°,同时为了在穿刺过程中能够观察到穿刺针针尖附近的情况,光学系统的视场角取90°。根据所选探测器的规格,光学系统像面尺寸设计为0.7 mm×0.7 mm,由此可以根据像高和视场角估算可见穿刺针光学系统的焦距值。根据应用光学理论可知,为了使宽视场光学系统轴上、轴外视场内照度均匀,其像高和焦距之间应满足正弦函数的关系,如下式所示[8]:

其中yp为像高,up为视场角。利用式(1)计算得到该系统的焦距约为0.7 mm。此时,光学系统引入的畸变量DST为

由上式可知,为保证像面照度的均匀性,光学系统引入的桶形畸变约为30%。
根据使用要求,可视穿刺针光学系统的工作距离约为10 mm。由高斯公式及系统焦距,可以计算出系统放大率约为0.075。由此可知,物方空间频率为16 lp/mm时,对应的像方空间频率为213.3 lp/mm。由此可知,为了保证系统能够满足高分辨率成像要求,设计的光学系统在213.3 lp/mm处MTF值要大于0.2。若系统的成像质量达到衍射极限,根据衍射极限系统MTF的计算公式,可推算出系统F/#应小于6。
由于穿刺针光学系统的焦距很短,考虑到实际系统需要留出足够的后工作距,因此光学系统选用反远结构。反远结构由前组和后组两部分组成,前组为负透镜组,后组为正透镜组。前组用于降低光线在后组的入射角度,减小后组的光线入射角度。后组用于前组出射光束的会聚和整个系统的像差校正。为了实现所需的视向角,前组和后组之间加入反射棱镜对光束进行转折。考虑到光学元件的布置问题,拟采用两次反射的工作方式,即经过前组的出射光束在反射棱镜内部经过两次反射后出射至后组,且入射光束和出射光束的光轴分别垂直于棱镜的入射面和出射面。
在光路分析过程中,可以将反射棱镜展开作为平行平板,整个光路的系统结构如图2所示。无穷远的轴上光线在前组的入射高度为h1,在后组的入射高度为h2,其出射光线与光轴的夹角为u′。第二近轴光线在前组的入射高度为hp1,与光轴的夹角为up1,经前组后的出射光线与光轴的夹角为系统的后工作距为l′,前组与平板前表面之间的间隔为d1,平板后表面与后组之间的间隔为d2,平板的厚度为d。前组的光焦度为φ1,后组的光焦度为φ2。设光阑位于后组处,并取规格化条件,对该系统的初始结构参数计算公式进行推导[9]。
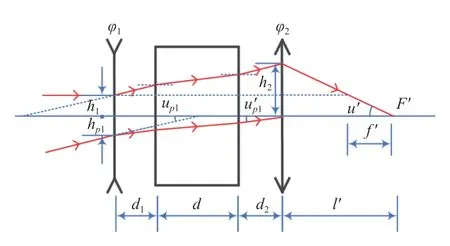
图2 光路结构Fig.2 The structure of the optical system
引入变量A表征前组的角放大率,A的定义如下:

根据高斯公式可得

由此可得

图2 所示光路的组合光焦度为

则后组的光焦度为

令前组的角放大率A取1.5,d1和d2取0.05 mm,反射棱镜的材料设为H-K9玻璃,其等效平板厚度取2 mm,利用以上公式可计算出前组光焦度φ1= −0.35,后组光焦度φ2=0.9。
3 设计结果
根据初始结构参数的计算结果,可先令前组为单片平凹透镜,后组为双胶合透镜,进行优化设计。在优化过程中,通过对双胶合透镜进行分离,并采用多片正透镜来共同承担双胶合透镜中正透镜的光焦度,减小光线在各个面上的入射角,降低高级像差,最终设计得到的光学系统光路结构如图3所示,主要参数的设计结果见表1所示。
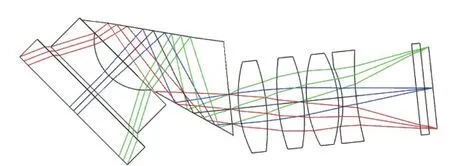
图3 设计得到的光路结构Fig.3 The optical layout of the designed optical system
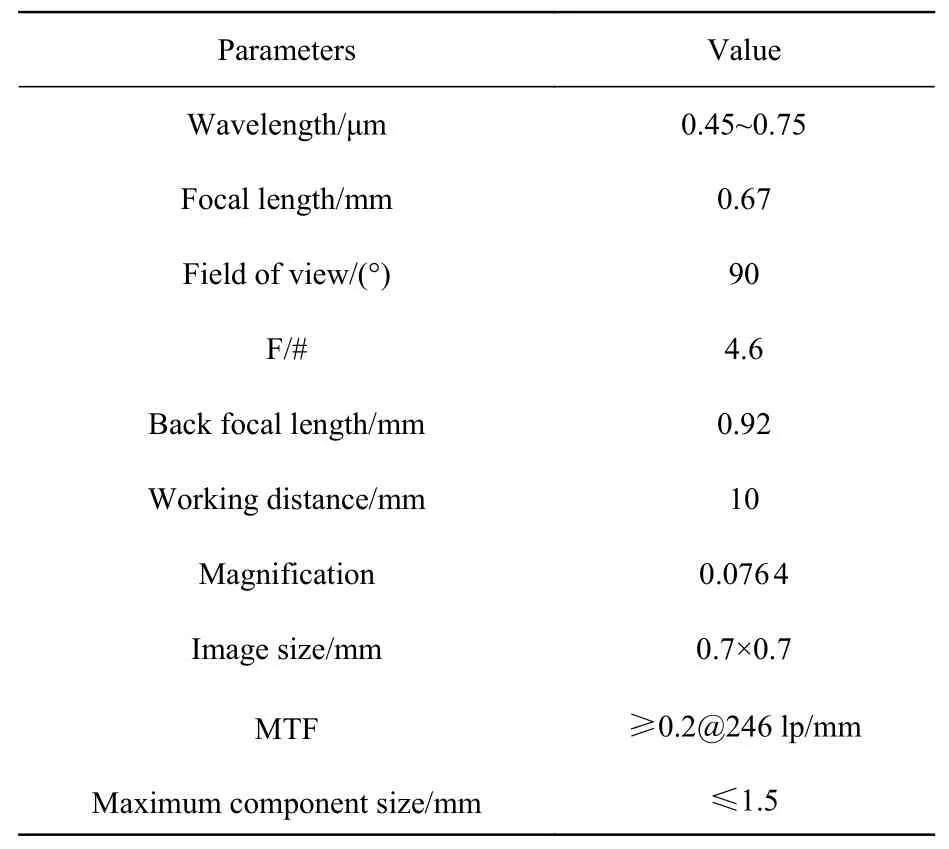
表1 主要参数的设计结果Tab.1 Optical parameters of designed optical system
设计得到的可视穿刺针光学系统点列图如图4所示。由图4可知,各个视场点列图的直径均小于艾里斑直径。图5是系统的MTF曲线,结果表明系统成像性能接近衍射极限,且各个视场的成像质量几乎一致。

图4 光学系统的点列图Fig.4 The spot diagrams of the designed optical system
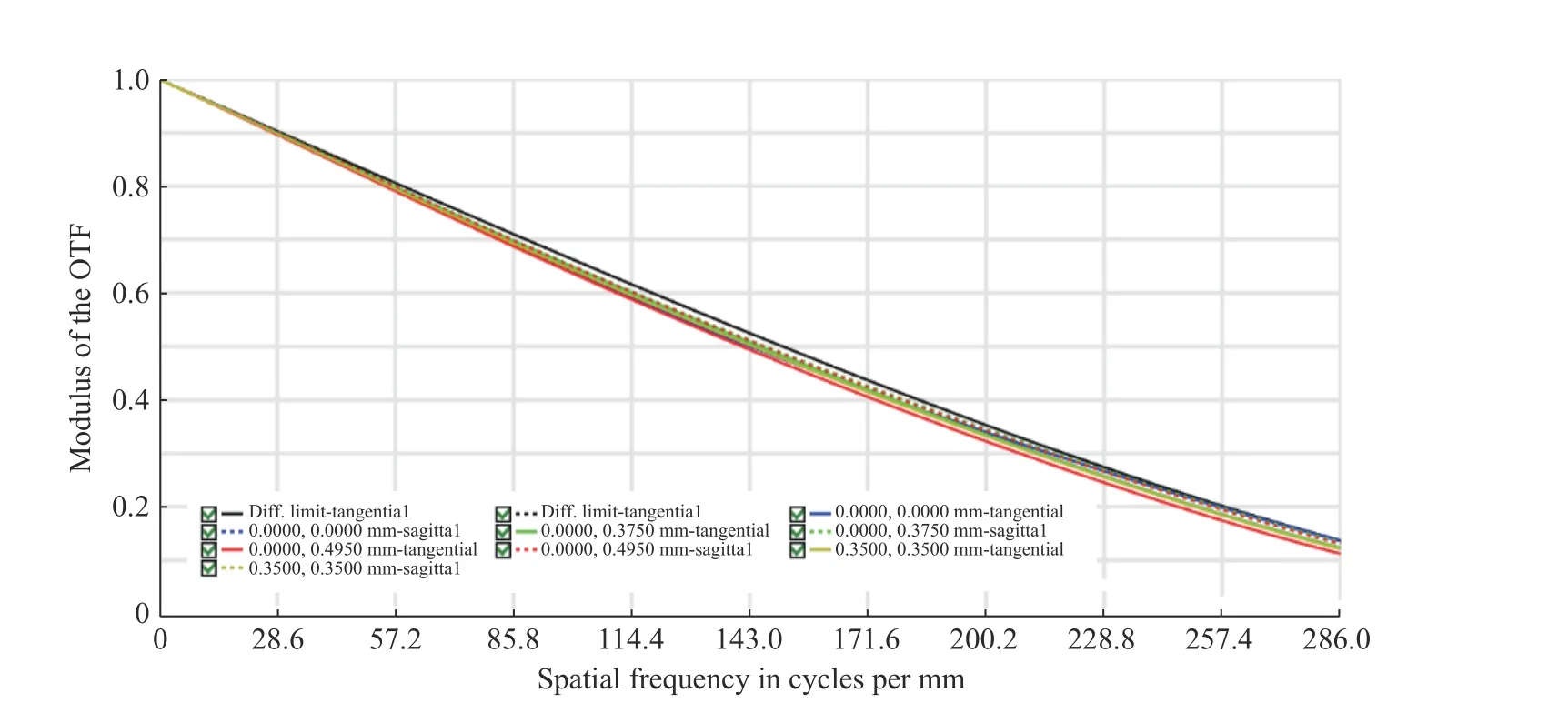
图5 光学系统的MTF曲线Fig.5 The MTF curves of the designed optical system
系统的相对照度曲线如图6所示,边缘视场照度下降约为5%左右,整个视场范围内具有较好的照度均匀性。系统的畸变网格图如图7所示。由图7可见,该系统存在较大的桶形畸变。优化后系统的最大畸变值约为32.9%,这和第二节中对畸变的预估结果基本一致。
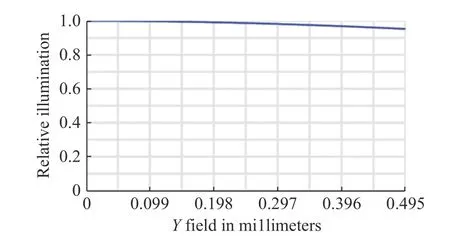
图6 光学系统的相对照度曲线Fig.6 The relative illumination curve of the designed optical system

图7 光学系统的畸变网格图Fig.7 The distortion grid of the designed optical system
4 系统研制及性能测试
根据光学设计结果,设计了相应的光机结构,机械结构剖面图如图8所示。光学系统中最大元件外径小于1.5 mm,最前端为蓝宝石玻璃窗口。
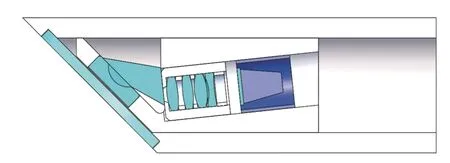
图8 可视穿刺针机械结构剖面图Fig.8 The cross section of the visual puncture needle
利用光学冷加工方法加工完成系统中的透镜和棱镜,部分元件如图9所示。装配完成后的光学系统的长度约为5.5 mm,如图10所示。

图9 部分光学元件Fig.9 Optical components used in the puncture needle

图10 装配完成的光学系统Fig.10 The optical system after assembly
将光学系统和OV6946微型CMOS图像探测器(像元尺寸为1.75μm,像元数为400 pixel×400 pixel)装配到一起后,装入长度约为150 mm的穿刺针管中,并进行防水密封处理。利用ISO12233靶标板对完成安装的可视穿刺针光学系统进行测试,测试场景如图11所示。针管固定于靶标板前,并通过USB接口来接收探测器的输出图像。通过移动可视穿刺针,使其对准靶标上的不同区域,可以进行不同的测试。

图11 可视穿刺针光学系统测试场景Fig.11 Visual puncture needle measurement scene
利用靶标板中的斜边图案可对成像系统的MTF进行测试,拍摄得到的斜边图案如图12(a)所示。对拍摄得到的斜边图案依次进行低通滤波、斜边倾角计算、求导以及傅立叶变换等运算后可以得到不同视场的MTF[10]。此时测量得到的MTF为包含探测器在内的整个成像系统的MTF,通过扣除探测器自身的MTF,可以估算出光学系统的MTF。通过数据处理后,得到不同视场下光学系统的MTF曲线如图12(b)所示,其中Tan_0和Sag_0表示0视场的子午和弧矢方向的MTF曲线,Tan_0.7和Sag_0.7表示0.7视场的子午和弧矢方向的MTF曲线。由测试结果来看,装配完成后的光学系统成像质量较好,在中频处MTF有所下降,在高频处的MTF基本接近设计值。同时可以发现225 lp/mm及以上频率处,部分视场的MTF数值超过了衍射极限值,这主要是由于图像噪声引起的测试误差。

图12 (a)拍摄的斜边图案及(b)光学系统的MTF测试结果Fig.12 The captured slanted edge images(a)and the MTF measurement results(b)of the optical system
根据MTF的测试结果,还可对可视穿刺针光学系统的空间分辨率进行评估。由测试结果可知,测试得到的MTF在空间频率236 lp/mm以内均大于0.2,则认定该系统的像方空间分辨率优于236 lp/mm。根据系统的放大率,计算得到其物方空间分辨率优于18.03 lp/mm,满足高分辨率成像的要求。将可视穿刺针光学系统分别对准靶标板上的双频环带图案和棋盘格图案,拍摄的图像如图13所示。图13(a)为拍摄得到的双频环带图案,可见,图像清晰,对比度高,表明装调完成后的系统具有较好的成像质量。图13(b)为拍摄得到的棋盘格图案,可以看到明显的形变,这是由系统中存在的畸变引起的,后续需要进行图像校正处理,以消除畸变的影响[11-13]。
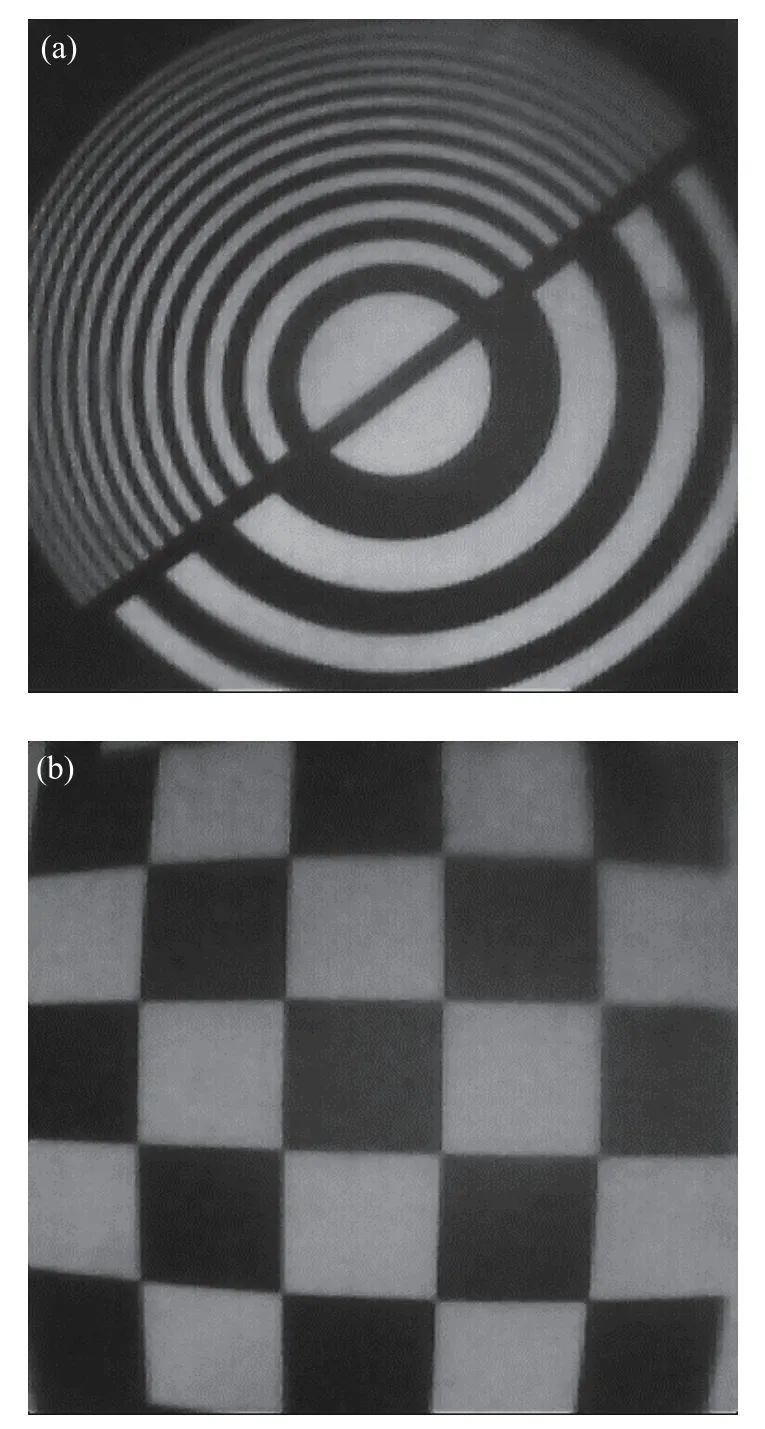
图13 (a)拍摄的双频环带图案和(b)棋盘格图案Fig.13 The captured dual-frequency zone plate image(a)and the checkerboard image(b)
5 结 论
本文设计和研制了一款高分辨率可视穿刺针光学系统,能够实现医学穿刺过程中的高分辨率光学成像。该系统采用了反远式结构,焦距为0.67 mm,F/#为4.6,全视场达到90°,视向角为45°。系统成像质量较好,物方空间分辨率优于18.03 lp/mm。整个光学系统中最大的光学元件尺寸小于1.5 mm,总长约为5.5 mm。在实验室中对装配完成的可视穿刺针进行了MTF测试和成像试验。结果表明系统具有较好的成像质量,能够实现清晰成像。该可视穿刺针有望用于骨科等领域,下一步将针对具体应用,利用研制完成的可视穿刺针开展相关医学实验。
