甘薯移栽与收获关键技术与装备
2021-10-09徐亚雷潘志国杨然兵
徐亚雷,张 还,潘志国,杨然兵,李 林
(青岛农业大学机电工程学院,山东 青岛266109)
0 引言
甘薯属旋花科,是一年生或多年生蔓生草本,不同地方对于甘薯的叫法也不相同,如番薯、红薯、地瓜等[1]。我国北方种植区域主要分布于淮海平原地区,而南方主要分布在长江流域及东南沿海各省。我国甘薯种植历史悠久,大约16世纪末叶由南洋引入我国福建、广东等地,而后在我国各地传播种植。据世界粮农组织统计,2018年甘薯世界总产量约919万t,而中国产量约532万t,约占世界总产量的58%[2]。甘薯含有丰富的营养物质,尤其是甘薯在抗癌保健方面有突出的表现。
1 甘薯生产机械化
甘薯生产过程总的来说可以分成5个阶段:培育秧苗、耕整起垄、移栽种植、田间管理、甘薯收获。其中移栽、收获劳动量占整个生产过程的75%以上,而实际的机械化水平不足26%,因此研制出更加实用高效的甘薯生产机械迫在眉睫[3]。我国甘薯生产机械的研发起步较晚,发展较慢,一直以来受到我国经济和工业技术水平的限制,发展长期处于停滞不前的状态,耕种收机械化水平远远低于玉米小麦等粮食作物。近年来,由于种植劳动力的大量减少,以及工业的快速发展对甘薯需求的不断增加,甘薯生产机械才有了一定程度的发展。
目前市场上虽出现了多种形式的甘薯生产机械,但生产上多以借鉴发达国家的机型为主,很多机器尚处于样机研发试验阶段,技术水平及实际生产效果还不成熟[4]。
1.1移栽机械
甘薯有性繁殖属于异花授粉,如果采用杂交的方式进行繁殖,过程复杂且效率低,而甘薯的营养器官具有较强的再生能力,因此用种薯培育甘薯秧苗再进行移栽的作业方式得到了广泛的采用。当培育的甘薯秧苗长致6个节位,薯苗高度>25 cm时要及时进行采苗移栽[5]。相对于其他用苗盘育苗的作物,甘薯移栽面临最大的问题是自动分苗困难,现有的甘薯移栽机普遍采用人工辅助分苗、放苗,这也是限制甘薯移栽作业效率的重要因素。
市场上通用的甘薯移栽机械主要分为导苗式、吊篮式、钳夹式等,如山东火绒公司制造的2ZQX-2型悬挂双行钳夹式甘薯移栽机,通过人工放苗在输苗带上,当输苗带转至靠近地垄时由夹持机构夹住秧苗插入地垄中,随后钳夹打开并从地垄中拔出完成一次移栽作业,但移栽株距受拖拉机行进速度影响较大,容易出现株距差异较大的情况。
日本、美国、加拿大等发达国家对于甘薯移栽的研究较早,目前已形成了从育苗到耕整起垄再到移栽的一整套种植技术[6]。其中种植面积最多的是美国,移栽机械也以大型机械为主,如美国雷纳多公司研制了雷纳多HTME1100型鸭嘴式移栽机。其采用丙烷加热燃烧器触碰地膜从而在地膜上烫出圆孔,移栽器中的秧苗由人工进行投放,当进入地垄时鸭嘴器打开放入秧苗完成移栽作业。日本种植机械主要由灵活作业的小型机械构成,代表的机型主要有自走带夹式移栽机、牵引式乘坐型人工栽插机(图1)等。这些移栽机械普遍自动化程度较高,适用于小块甘薯种植区域但作业效率较低。
1.2收获机械
甘薯移栽过后经过一个生长周期便到了收获的阶段。甘薯根据种植的时间不同,生长周期也不相同,春薯的生长周期为160~200 d,而夏薯一般为110~120 d。一般在5—6月移栽种植的甘薯在10月中下旬就可以收获,稍晚一点种植的红薯在11月上旬至枯霜前收获完毕。
与人工收获甘薯相比,机械收获甘薯具有省时、省力的优点。传统的人工收获甘薯,平均每人每天收获甘薯0.13~0.20 hm2,收获过程繁琐劳累,甘薯破损率高,平均破损率达到15%左右,而利用机械收获效率可以达到人工收获的20倍以上,而且收获的伤薯率仅为人工收获伤署率的53%,甘薯的收净率更是达到96%以上,大大减少了甘薯漏收现象的发生[7]。

图1 日本井关农机株式会社的PVHR2型移栽机Fig.1 PVHR2 transplanter of Japan Jingguan Agricultural Machinery Co.,Ltd.
甘薯机械化收获主要有3种方式。一种是先用杀秧机清除秧蔓,再用甘薯挖掘机械将甘薯挖出,简单清理过后将甘薯铺放成条,后由人工做进一步清理、装车运输。这种甘薯收获方式机械化水平较低、劳动强度大,但在我国应用广泛。另一种甘薯收获方式是杀秧机去除甘薯秧蔓后,采用联合甘薯收获机械对甘薯进行集挖掘、清选、装运于一体的作业,这种作业方式虽采用两段式分工,但也极大地节省了劳动力。第3种是目前收获自动化程度最高的方式,使用一种机械设备,一次性完成杀秧、清选、收获的全过程,但是这种收获方式技术水平要求较高,在我国国内运用较少。
1.2.1甘薯杀秧机械
对于分段式甘薯收获方式,甘薯收获前都要进行杀秧处理。甘薯秧蔓的处理主要有2种方式。一种方式是薯蔓经杀秧机粉碎后直接抛撒在大田里,这种秧蔓粉碎还田机又分成卧式和立式两种。另一种方式是甘薯杀秧后对茎叶进行收集用作饲料,对于薯蔓的收集又可分成整蔓收集和粉碎收集,如日本洋马生产的HH10型甘薯藤蔓采收机,收获时将藤蔓挑起然后沿根部切断,不粉碎直接铺放收集[8]。
我国目前甘薯收获机械化程度仍有待进一步提高,大部分地区还是靠人工收获,仅有少部分地区是采用分段式机械收获的方式。因此在收获前要提前进行杀秧处理,对于秧苗的处理方式也主要为粉碎式还田型[9]。杀秧机代表机型主要有洪珠1JH-110型薯类杀秧机(如图2所示,其采用三点式悬挂机构,工作时刀片高速运转,机体内产生负压,将垄底的秧苗吸起,利用高速运转的刀片将其粉碎),青岛璞盛1JH-130型杀秧机,以及河北省农机化研究所研制的1JHS型系列甘薯杀秧机等。

图2 青岛洪珠研发的1JH-110型薯类杀秧机Fig.2 1JH-110 potato seedling killing machine developed by Qingdao Hongzhu
1.2.2甘薯挖掘机械
对于甘薯挖掘机械,国内生产的厂商众多,但是挖掘甘薯的原理基本类似。进行甘薯作物的收获作业时,在拖拉机的驱动下,收获机械的振动挖掘装置振动挖掘铲入土,随后将甘薯与土壤一起从土里挖出来,随着机具的不断前进,挖出来的甘薯和土壤一起被推送到输送链式栅格筛上。由于振动链条带动振动轮不断转动而产生抖动,因而输送链式栅格筛上的甘薯在向后运动的同时,附着的泥块因振动轮对输送链式栅格筛的抖动作用,不断地从筛条间散落到地面上,达到薯土分离的效果。经过分离筛选出的甘薯继续通过输送链式栅格筛,在集薯导向板的作用下有序的落在收获机经过的垄上,然后再经过人工的捡拾收集,最后完成对甘薯作物的收获作业。其总体结构如图3所示。代表机型有山东圣鲁机械厂生产的SL-SHJ型甘薯收获机、河北省农机化研究所研制的4U-2系列薯类收获机等。
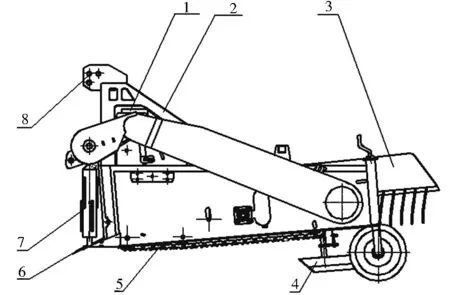
1.变速箱 2.机架 3.集薯导向板 4.刮平器 5.输送链式栅格筛 6.振动挖掘装置 7.防缠草装置 8.悬挂装置图3 甘薯挖掘机械结构Fig.3 Mechanical structure of sweet potato excavation
1.2.3国外一体化甘薯收获机
国外对于甘薯收获机的研究较早,自动化程度较高,技术也比较成熟,收获机也主要是集清蔓、挖掘、收集于一体的全自动化机械[10]。如日本松山株式会社研发的GZA651型甘薯收获机(图4)采用自走式履带驱动,工作工程中甘薯挖掘深度可以调节,输送过程采用两级分离输送,初步清选后的甘薯转入由人工做进一步清选,最后清选好的甘薯放入可升降式挂袋中。这种甘薯收获机体型较小、作业灵活,适合中小型地块甘薯的收获。

图4 日本松山株式会社的GZA651型甘薯收获机Fig.4 GZA651 sweet potato harvester of Matsushama Co.,Ltd.
英国standen生产的TSP1900型甘薯收获机(图5),采用对辊去秧、挖掘式收获技术[11]。不用收获时提前进行杀秧,可直接在甘薯秧苗地里收获,收获的双行行距控制在1.0~1.2 m,3段式提升分离装置,每段都可以在驾驶室里单独控制高度,从而达到较好的分离清选效果,传送运输系统也可实现双面装车,提高工作效率。

图5 英国Standen公司的牵引式甘薯联合收获机Fig.5 Standen traction sweet potato combine
2 面临的问题
(1)国内从事甘薯研发的专业队伍少,既懂农艺又精通机械设计的人才匮乏,生产甘薯种收机械的公司缺乏专业的技术人才,创新、科研能力不足[12]。市场缺少相关监管措施,产品相似度高,新产品研发后容易被仿制,农民对于农机价格的可承受范围较小等都是制约甘薯生产机械发展的原因。
(2)我国幅员辽阔,甘薯种植的地区广泛,全国分为5个薯区,而不同的地区气候、土壤存在较大差异,对于甘薯种植的农艺要求也不尽相同,北方春薯区一年一熟,北回归线以南南方秋冬薯区,四季皆可种甘薯,以一年三熟最为普遍[13]。因此,进行秧苗扦插及收获时,秧苗的大小形状及种植垄型,都存在较大的差异,这给机械化种收都带来了较大的困难。
(3)无论对于甘薯移栽机还是收获机的研发,国内很少有针对甘薯作物的专用机型,往往存在一种机型用于多种作物的种植和收获,而不同的作物无论是种植农艺要求还是形状特征都存在较大的差异,因此很难达到统一较好的效果。
3 发展方向
(1)种植、收获集成化程度将增强,甘薯的移栽要分成耕整、起垄、覆膜、移栽和浇水等过程,而甘薯收获也要分成割蔓、挖掘、清选和收集等。分段式收获虽作业过程简单,但随着人工费用以及对种植户作业效率要求的增加,显然这种分段式的作业方式难以满足生产效率的需求,因此实现集多种功能于一体的全自动化机械将是未来甘薯生产机械研究发展方向之一[14]。
(2)机器适应性和作业参数可调性将进一步增强。研发能根据不同地区农艺种植的特点,随时调整作业参数,更换工作部件等,以满足多种收获地形、种植条件的要求,也是未来甘薯移栽机发展的方向之一[15]。
(3)机电液一体化的智能检测控制机构,已成为农机制造的发展趋势,而我国大部分甘薯生产机械还是处于纯机械结构的阶段,自动化程度低、制造不精细,因此甘薯生产机械将向着更加方便灵巧、自动化、智能化方向发展[16]。
4 结束语
随着我国工业化进程的加快,甘薯的需求量会进一步加大,而现有的甘薯生产机械又不能满足日益扩大的甘薯产业的需要。自动分苗放苗、分段式挖掘收获效率低下,以及我国农村、农民经济发展情况的约束,使生产机械的研发进程陷入瓶颈,研制更加智能化、性价比更高的甘薯移生产机械成为了当前需要迫切解决的问题[17]。
