高速精密冲床肘接式执行机构的动力学分析
2021-09-26张云献
张云献

摘要:本文围绕高速冲床肘接式执行机构的结构优化和动态性能等方面,进行了肘接式执行机构的动力学分析。把肘接式执行机构作为传动系统的高速精密冲床三维模型导入Recurdyn,根据装配要求为其添加约束和工作载荷驱动载荷再进行仿真,通过结果后处理得到肘接式执行机构中关键杆上力的变化曲线,通过与Matlab中得到的力的曲线相对比,验证了设计的合理性。
关键词:高速精密冲床;多体动力学;仿真分析
中图分类号:TG385.1 文献标识码:A 文章编号:1674-957X(2021)16-0040-02
0 引言
随着冲压工艺的发展,加上传统冲床的先天缺陷制约了冲压工艺的进步,再有其生产效率不高,严重的影响其发展[1]。为了满足高速发展的航空航天行业、电子等加工制造行业对板材冲压成型、拉伸的需求,通过改变执行机构的形式来提升机械式冲床的工作性能[2]。通过运动学、动力学等分析结合优化设计得到更加合理的执行机构,这对机械冲床的性能和提高市场竞争力具有很重要的意义[3]。
1 高速精密冲床肘接式执行机构多体动力学模型的建立
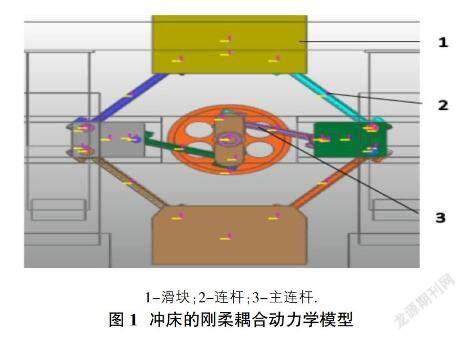
构成高速精密冲床的零部件成百上千,但对冲床建立三维模型时,只需要简化模型。依据主要的冲床零部件和冲床模型的拓扑结构[4]和间隙碰撞和柔性多体动力学理论基础[5]建立冲床的刚柔耦合动力学模型。建立的冲床刚柔耦合动力学模型如图1所示。
2 肘接式执行机构连杆受力分析与截面积设计
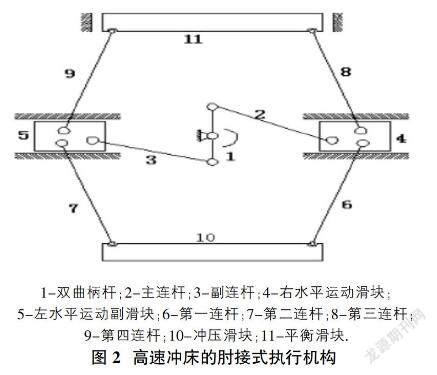
由图2已经得到机构各构件与曲柄的运动关系,根据达朗贝尔原理[6],对连杆8进行受力分析,如图3所示。
已知条件:滑块的速度V,摇杆8的加速度,杆的相对速度。
所求量:F2、F3、F4、S。
根据达朗贝尔定理,可得下列方程(1):
(1)
相对于机件受到的载荷来说,构件自身的重量很小,因此可以忽略不计,同时为了在Matlab计算方便,在建模时忽略该执行机构的重力。
为了确保摇杆正常工作,所以取最大的应力值2.43×106N,得到最小的设计截面面积约为2900mm2。
3 肘接式执行机构在Recurdyn中的动力学仿真
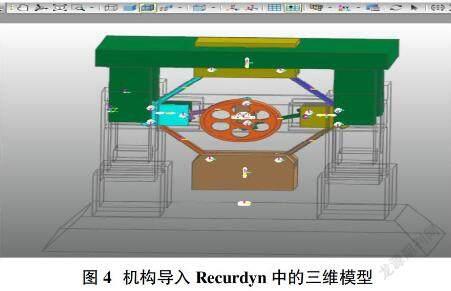
由图2确定的高速冲床的肘接式执行机构的原理图,结合执行机构部分尺寸,通过三维制图软件CATIA,建立以肘接式执行机构为传动系统的冲床模型,然后把所建模型导入到多体动力学软件Recurdyn,添加约束,如图4。
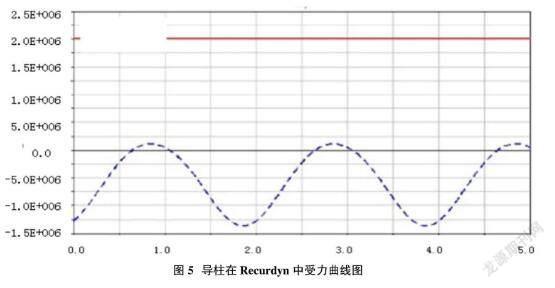
在Recurdyn中,对导入的肘接式执行机构的冲床模型添加约束和载荷,给曲轴添加驱动载荷,然后对该物理样机进行仿真,通过结果后处理得到的分析结果如图5。
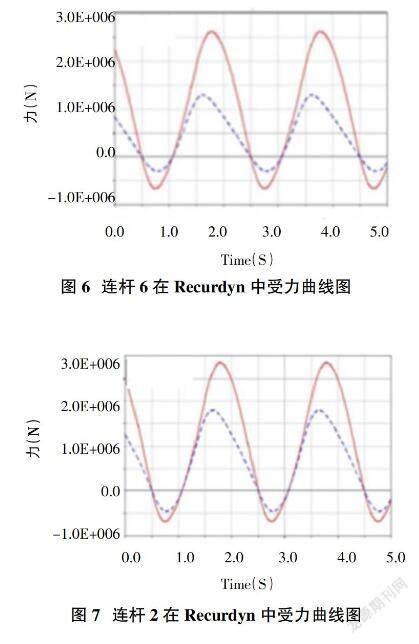
根据图6、图7可知:红色实线JOINT-9-MEA-1是连杆在Y方向上受的力F1,蓝色虚线JOINT-9-MEA-3较水平的是摇杆在X方向上所受的力F2。由于連杆上承受的最大载荷2.6E+006N没有超出前面Matlab中的力,因此验证了前面设计连杆的截面积2900mm2是合理的。
4 结论
建立了高速精密冲床肘接式执行机构多体动力学模型,应用动力学理论仿真试验了在实际工况下执行机构的动态特性,此模型真实的展示出了高速精密冲床肘接式执行机构各零部件可视化动态参数,通过与Matlab中得到的力的曲线相对比,验证了设计的合理性,为强度、疲劳分析设计提供了科学依据。
参考文献:
[1]刘川,宋四全,李勇.国内冲压自动化线成套技术及装备供应能力研究[J].机器人技术与应用,2004(3):8-12.
[2]宋四全.金属板材成形设备行业的现状和发展(下)[J].金属加工:热加工,2005(4):70-73.
[3]周秋林.分析航空电器微小零件的制造特点[J].电子制作,2013(13):68.
[4]王春生.高速精密自动化:浅谈国内外高速精密冲床的现状与发展[J].锻造与冲压,2008(7):21-22.
[5]焦晓娟,张湝渭,彭斌彬.RecurDyn多体系统优化仿真技术[M].北京:清华大学出版社,2010.
[6]鹿新建,柯尊芒,朱思洪,等.多连杆高速冲床滑块运动曲线研究[J].锻压技术,2010,35(4):90-94.
