钻采综合性能测试系统姿态调整装置研制
2021-09-11李建永孙其龙王开宝姜生元邓湘金罗春阳高兴华
李建永,孙其龙,王开宝,姜生元,邓湘金,罗春阳,高兴华
(1.北华大学机械工程学院,吉林 吉林 132021;2.哈尔滨工业大学机电工程学院,黑龙江 哈尔滨 150001;3.中国空间技术研究院,北京 100081)
在探月工程三期中,着陆器在悬停阶段结束后,将以自由落体落于月面,着陆器主腿、副腿将发挥缓冲、减振作用.4组支撑腿可能会产生距离不等的压缩或者拉伸,导致着陆器本体相对于着陆平面产生最大不超过6°的俯仰倾角.综合考虑着陆器着陆点的月面地形、地貌特征(最大坡度9°),以及着陆器自身的俯仰倾角和月面石块影响可知,着陆姿态将有多种可能.按照着陆器着陆姿态设计月面采样机构是方案设计中必须解决的问题,即要考虑月面采样机构对月面环境的适应性问题.
为了模拟着陆器着陆月球表面时的各种姿态和极限着陆姿态,要进行地面试验验证,因此,需要研制着陆器模拟件姿态模拟装置.着陆器/上升器组合体模拟件固联在姿态模拟装置顶层,通过调节姿态模拟装置实现着陆器着陆姿态模拟.本文研制的姿态模拟装置与模拟件构成一个系统,为钻取采样装置、表面采样装置、样品封装与转送装置提供试验安装平台,并可模拟多种月形环境下的着陆器着陆姿态;利用该系统可对模拟月壤钻取采样、表取采样、样品封装与转送等装置进行功能与性能综合测试,并具有对各运动部件进行运动干涉检测的能力[1-2].
1 姿态调整装置方案设计
1.1 功能及性能要求
用于地面试验环境的姿态调整装置功能指标:能够模拟月面着陆姿态的变化;可以调节着陆姿态的极限角度;能够承载着陆器/上升器组合体的本体质量;具有防尘功能.装置的性能指标参数见表1.
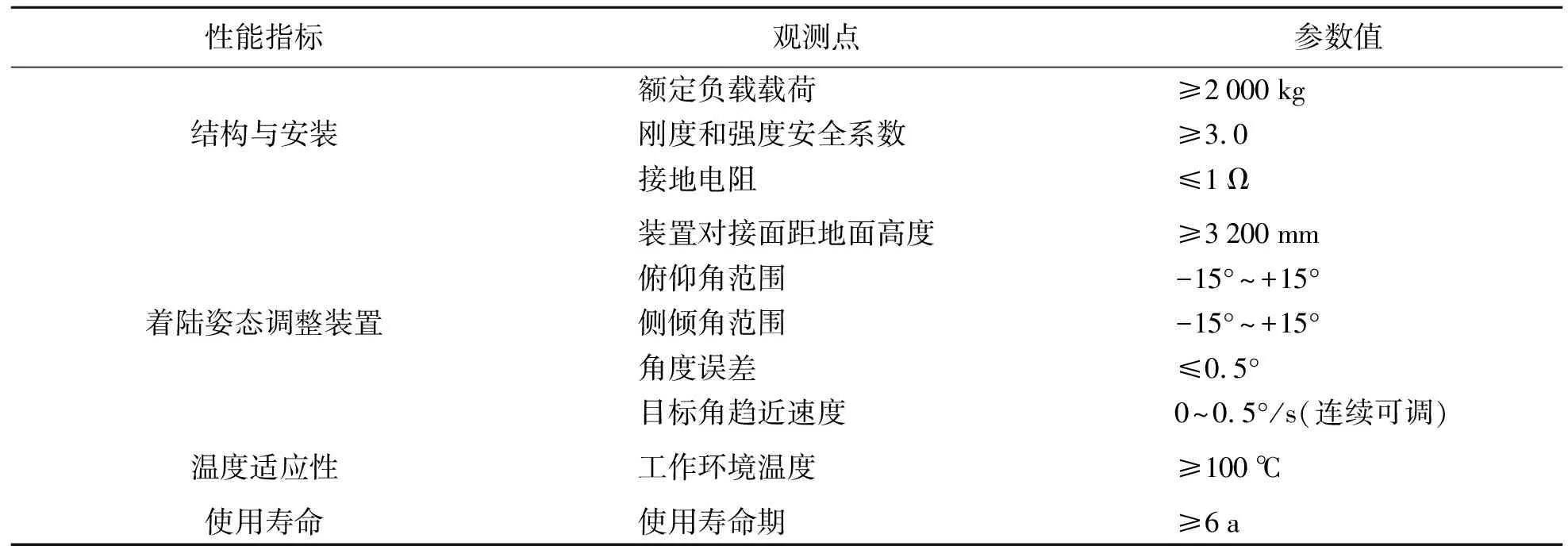
表1 姿态调整装置性能指标Tab.1 Performance index of attitude adjustment device
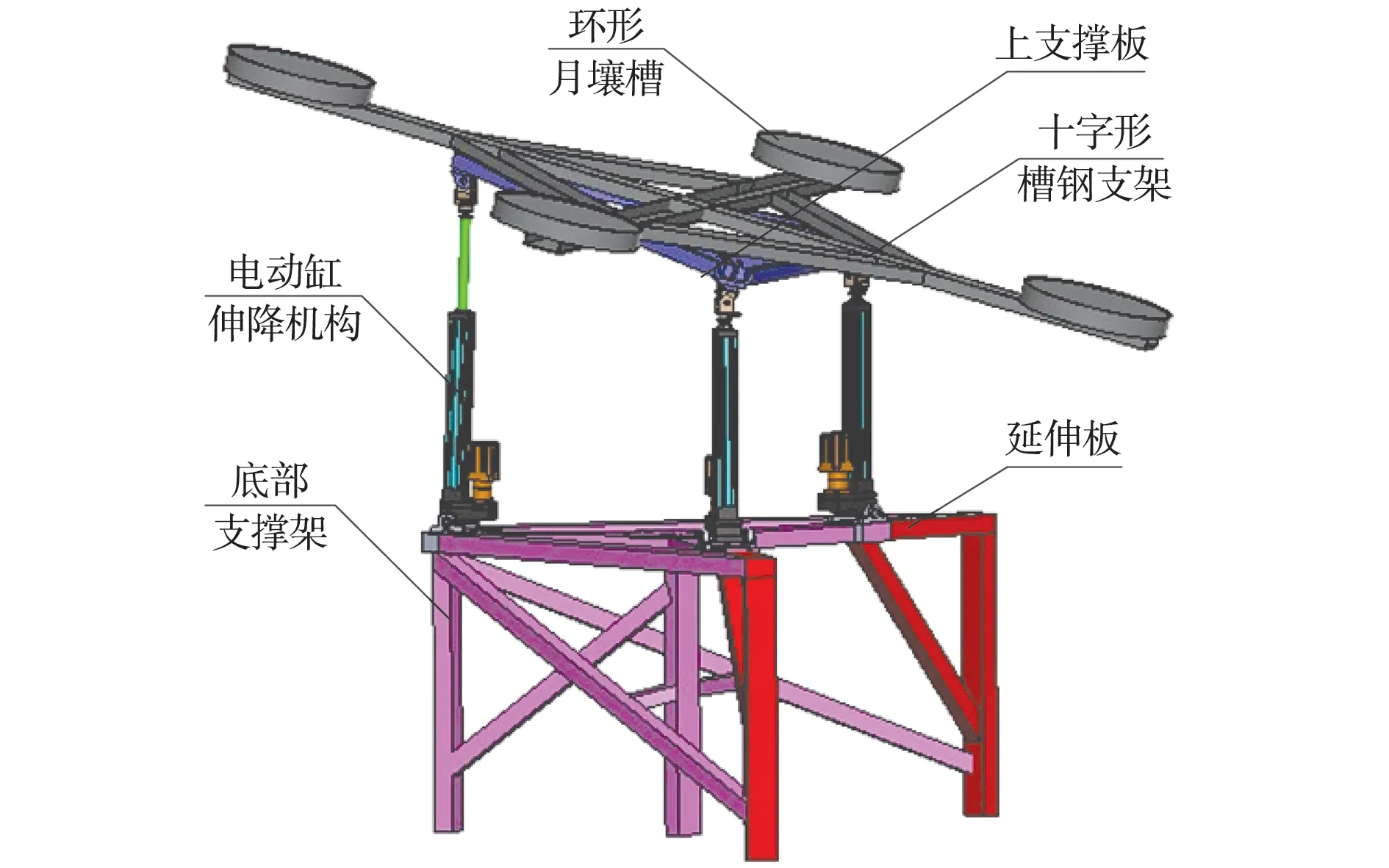
图1 姿态调整装置系统组成Fig.1Composition of attitude adjustment device system
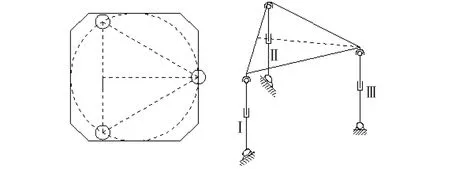
图2 三腿支撑方案支撑腿位置分布Fig.2Position distribution of three-leg support scheme
1.2 系统组成及工作原理
姿态调整装置由十字槽钢支架、环形月壤槽、上支撑板、电动缸升降机构以及底部支撑架等组成,见图1.
姿态调整装置采用三腿支撑方案[3],由3个电动缸支撑,即三自由度并联机构.结构由动平台、固定平台及连接动平台和固定平台的3条运动支链组成.3条运动支链结构相同,每条都由十字万向节、移动副和铰链组成,万向节的轴线垂直于移动副的轴线及铰链的轴线.当机构在原动件驱动下运动时,其动平台绕某一固定点作圆周转动.三支点结构简单,并且各运动支链的结构对称.支撑腿分布见图2.
根据空间运动机构理论,空间运动机构自由度计算结果为
式中:F为空间机构的自由度数量;N为机构的构件数目;Ui为第i个运动副的约束;g为物体间运动副数目.
姿态调整装置的俯仰姿态调整见图3.装置由3个支撑腿支撑,在正俯状态时,保持支撑腿电动缸不动(支撑腿高度不变),控制支撑腿电动缸;当倾角为15°时,停止电动缸伸长.在负仰状态时,保持支撑腿电动缸不动,支撑腿同时升高;当倾角为15°时,停止电动缸运动.
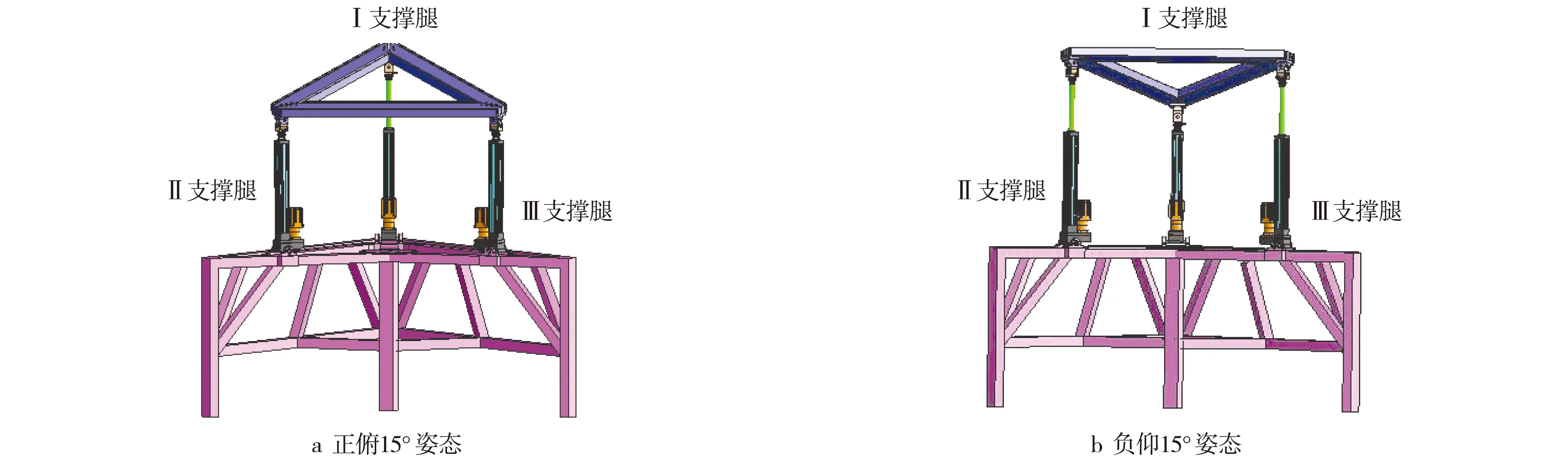
图3 姿态调整装置俯仰姿态调整Fig.3Pitching attitude adjustment of attitude adjustment device
姿态调整装置的侧倾姿态调整见图4.在正侧倾状态时,保持支撑腿高度不变,升高支撑腿Ⅰ、Ⅲ;当倾角为15°时,停止支撑腿Ⅰ、Ⅲ电动缸运行.在负侧倾状态时,保持支撑腿Ⅰ高度不变,升高支撑腿Ⅲ;当倾角为15°时,停止支撑腿Ⅱ、Ⅲ电动缸运行.姿态调整机构极限状态下电动缸伸出长度见表2.
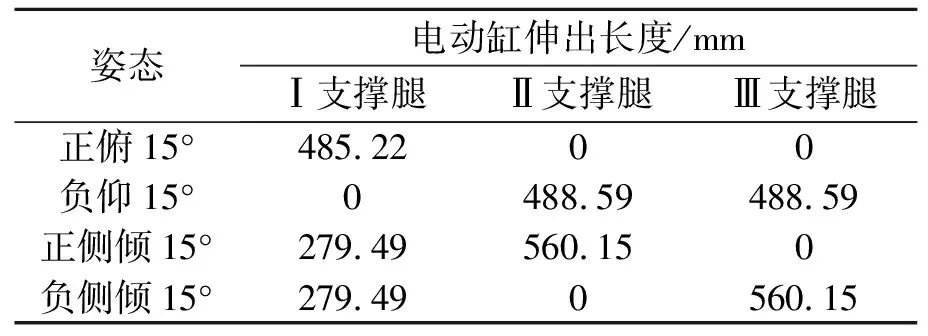
表2 姿态调整机构极限状态下电动缸伸出长度

图4 姿态调整装置侧倾姿态调整Fig.4Tilting attitude adjustment of attitude adjustment device
1.3 电动缸安装分度圆的确定依据
着陆器的包络范围是在直径为4.5 m的圆上,而支撑腿是作用在由槽钢搭建的十字形架子的环形月壤槽内,因此,姿态调整机构的实际可用范围应该处在直径4.5 m的圆内[4].但在实际设计中,比较理想的空间尺寸是处于2.0~2.5 m的圆内.设计约束条件:
1)为了使操作平台更具人性化、避免干涉以及提供月壤桶的操作空间,实际可用到的分度圆直径在2.5 m之内.

图5 模拟件极限角度质心位置Fig.5Position of limit angle center of simulation piece
2)三点支撑组成三角形,支撑着陆器/上升器模拟件的质心离三角形支撑面的距离大约在1.2 m,当姿态调整旋转15°时,模拟件质心投影的分度圆直径至少需要2.0 m.
3)为了能够稳定调节姿态调整装置,电动缸安装的分度圆越大越好,因此,在符合各部分设计要求的前提下,取电动缸安装的分度圆直径为2.5 m.
1.4 着陆器/上升器模拟件侧翻问题分析
由于月面坡度和着陆腿的伸缩量不同,可能导致在月面存在不同的着陆姿态.当着陆器调整到不同姿态时,装置出现侧翻的可能情况包括:1)着陆器的支撑腿与接触的环形月壤槽脱离;2)着陆器/上升器模拟件质心投影在姿态调整机构底部的三角形之外,姿态调整机构侧翻[4].
模拟件极限角度质心位置见图5.为了保证着陆器模拟件不出现侧翻,需要满足以下条件:
1)着陆器与十字形槽钢上的月壤槽非刚性连接,在姿态调整过程中需保证模拟件质心不偏移出十字形槽钢构成的矩形范围.
2)姿态调整机构分布在由3个电动缸组成的直径2.5 m的分度圆上,模拟件处在姿态调整机构上方1.2 m处.经模型测量与计算可知,着陆器/上升器模拟件俯仰和侧倾到极限位置时,质心在电动缸搭建的三角形内,距离三角形边缘168 mm.为了更加稳定和保险,通过延伸支撑位置来扩大底部支撑面积.因此,姿态调整机构能够稳定地坐落在地面,不会出现侧翻的情况.
2 姿态调整装置设计方案理论分析
2.1 着陆器支撑腿支撑力设计计算
作为着陆器的支撑结构,支撑腿对着陆器起到一定的支撑保护作用.通过计算着陆器支撑腿的支撑力可以有效防止在角度调节过程中着陆器侧翻,同时更好地控制着陆器整体的自身载荷,保证安装过程的安全[5].着陆器姿态调整装置三维效果见图6.
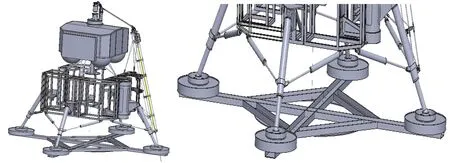
图6 着陆器姿态调整装置三维效果Fig.63D rendering of attitude adjustment device of the lander
着陆器由4个支撑腿提供支撑力.对着陆器进行力学模型简化,并在UG三维绘图软件中测得质心点的位置.受力分析见图7.
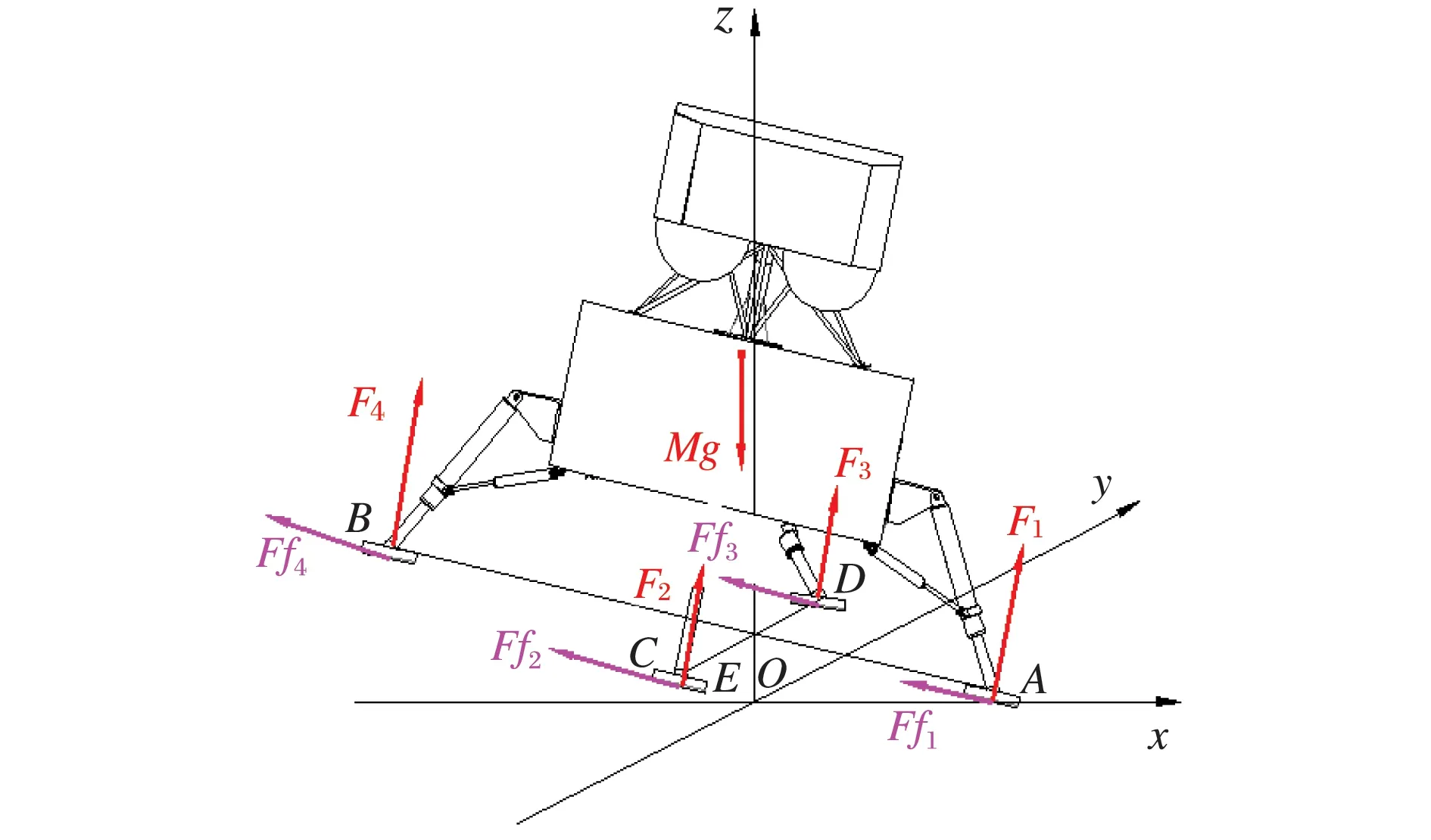
图7 着陆器姿态调整过程支撑腿受力分析Fig.7Force analysis of the leg during the attitude adjustment of the lander
由空间力系平衡条件列写平衡方程:
∑Fz=0,F1+F2+F3+F4=Mg,
(1)
∑Mx(F)=0,F2×OC-F3×OD=Mg×cos15°×26,
(2)
∑My(F)=0,F1×OA+F4×OB=Mg×cos15°×38,
(3)
∑Mz(F)=0,Ff2×OC-Ff3×OD=Mg×sin15°×26
.
(4)
由式(1)~(4)联立可得
F1=10 260 N,F2=F3=200 N,F4=5 340 N.
2.2 电动缸支撑力设计计算
根据电动缸支撑力的计算结果,从满足刚度、强度及使用性的角度确定电动缸规格,确保着陆器在姿态调整过程中可以安全可靠工作[5].装置支撑机构三维结构见图8.

图8 装置支撑机构三维结构Fig.83D structure of support mechanism of the device
通过对着陆器姿态调整模型整体结构的分析,对装置整体进行力学模型简化,在UG三维绘图软件中进行测量,确定姿态调整机构整体质心点的位置.受力分析见图9.
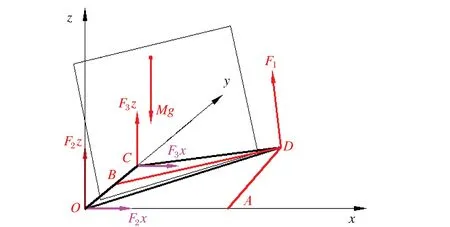
图9 着陆器姿态调整装置支撑机构受力分析Fig.9Force analysis of supporting mechanism of the device
∑Fx=0,F2x+F3x-F1sin15°=0,
(5)
∑Fz=0,F2z+F3z+F1cos15°=Mg,
(6)
∑Mx(F)=0,F1×OA+F3z×OC=Mg×1 425,
(7)
∑My(F)=0,F1×OA=Mg×1 200
.
(8)
由式(5)~(8)联立可得
F1=1 055 N,F2x=F3x=1 200 N,F2z=F3z=4 880 N.
2.3 姿态调整装置调整过程运动干涉检查
着陆器/上升器模拟件需要适应两套钻取机构的安装位置:一套与着陆器铅垂方向成16°;另一套与着陆器铅垂方向平行并且安装在着陆器内部.需要检查模拟件在俯仰或者侧倾的极限情况下与姿态调整机构是否存在干涉[6-7].
月壤桶上部离地面的高度为2 955 mm,车体尺寸为2.0 m×1.8 m.在姿态调节过程中,月壤桶机构的空间位置变动与姿态调整机构存在运动干涉的可能性.设计姿态调整机构底部支承座需要给两套钻取机构的土槽车1、2调节预留足够的空间.
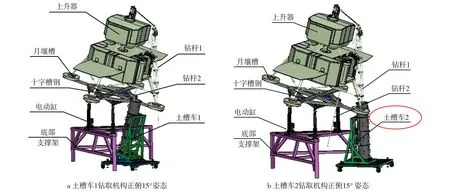
图10 调整过程运动干涉情况Fig.10Motion interference during adjustment
3 小 结
姿态模拟装置设计是整个采样分系统集成与验证平台设计中技术含量较高、可深入研究性较强的一个功能件设计,影响整个采样分系统集成与试验平台设计,对确保探月计划三期的顺利实施具有重要意义,要从方案设计、理论分析、运动干涉、支撑力计算等角度满足月面采样机构对月面环境的适应性要求.本文在满足姿态调整装置功能指标及性能指标要求的条件下,确定了姿态调整装置的系统组成;根据着陆器的极限着陆姿态确定了电动缸的伸出长度;对电动缸安装位置、模拟件侧翻问题进行了工况分析.在方案设计的基础上,对电动缸支撑力、着陆器支撑腿支撑力进行了设计计算,结果显示,均在安全范围内.本次姿态调整装置设计结构简单、控制方便.
