焊接机器人在轨道交通装备制造中的应用
2021-09-10耿一萌石永乐刘梓晗
耿一萌 石永乐 刘梓晗




摘要:随着我国经济的不断发展,人民生活水平不断提高,人们不再仅仅追求温饱,而更加追求生活的便利。由于人们提出的要求,我国轨道交通不断发展,以满足人们对便利生活的要求。然而,为了促进轨道交通的不断发展,研究者提出利用焊接机器人作用于轨道交通装备的制造,促进轨道交通装备的发展。本文主要探究焊接机器手在轨道交通装备制造中的实际应用。
关键词:焊接机器人;焊接;轨道交通装备制造
1焊接机械手设备系统的简单介绍
该设备设计为一大型龙门行走机构,龙门纵向行程 115 米;轨道长 120 米,运动系统采用齿轮/齿条和同步控制双侧驱动,焊接电源、控制柜、空气压缩机和丙烷气瓶等装置置于龙门架之上。龙门架上悬挂两台焊接机械手,可沿龙门架横向移动,轨道中心间距 5.5 米,横行行程4.5米。每台机械手配置一个激光传感器和一套焊接烟尘净化装置。系统从平行布置在地面导轨一侧的铜排取电。同时在龙门系统上增加了清理氧化膜及焊接黑灰装置,此装置安装在一套伺服系统控制的竖向滑轨上,此滑轨可以通过示教系统编程控制,同时可以编程打磨角度。此外还加装了自动拾取加热枪,可以在湿度过高的情况下,通过程序自动拾取焊枪进行预加热功能。在不使用的情况下,自动放置在一旁,不影响焊接程序执行。该焊接机械手设备系统在轨道交通装备制造之中主要是从局部到整体的顺序,其首先应用于较为简单,且需要大批生产部件焊接工作之中所使用,主要包括轨道交通装备各分片的焊接。在焊接机械手的应用达到熟练之后,可将其应用于轨道交通装备整个交通装备骨架与车架总成的焊接工作之中。
2焊接机械手设备的优势
焊接机器手设备各方面的优势,有助于复杂的轨道交通装备制造工作,尤其是对轨道交通装备各部分的焊接精准性以及效率方面的提升。
(1)系统整体刚性好,运行稳定可靠。可以保证铝合金焊接的高精度需要
(2)地面整洁,仅需布置导轨,占地面积小,方便夹具布置和工件装卸以及操作人员行走
(3)成熟的设计,故障率低
(4)机器人可以沿龙门运动,充分保证最佳工作姿态
(5)灵活性高,适用面广。龙门架下可以纵向布置四个标准客车工位。采用一套设备,可以满足焊接各種型号的铝合金客车大部件的要求。
(6)采用最为先进的激光传感器系统,保证焊缝位置偏差的跟踪和填充量变化的自动补偿
(7)电气装置皆置于龙门架上,无需拖动复杂的电源电缆和气路管线,大大简化维修工作
(8)采用最为先进的数字化逆变焊接电源,配以铝合金专用焊接软件,近一步保证焊接质量
(9)丰富的弧焊软件,中文 Windows 界面,简化操作,提高效率
(10)打磨等辅助工具也可以通过编程进行控制,可以有效地减少人工操作的时间和劳动强度。
3.焊接机械手系统各部分技术描述
焊接机械手的应用需具备系统性,使用单个的焊接机械手不能够发挥其在轨道交通装备制造中的作用。因此,焊接机械手的使用需要从整体上来规范其操作的步骤与流程,从各个模块进行综合性的考虑,在焊接机械手使用初期可以先从较为典型的轨道交通装备制造开始,设计符合装备制造的焊接方案,通过考虑装备的类型来进行焊接机械手的应用。
3.1焊接机器人,型号 RTi 456-S
精密的 RTi 456-S 焊接机器人为 6 轴旋转关节式设计,每个轴臂都采用坚固的铸铝结构。倾斜式主轴设计,各关节的高自由度以及短小灵活的轴臂为此机器人的主要特点,即使对于难以接近的位置,仍然可以保证其很大的工作范围和最佳的焊接角度。此机器人腕关节的焊枪连接器为空心轴式设计,其上装有碰撞保护开关,此独特的设计为机器人的焊接工作提供了 最大的灵活性,同时也避免了焊接电缆和机器人手臂的缠绕,在最大程度上保证了焊接机器人对轨道交通装备各复杂部分的焊接。为保证各轴的平稳动力传 递,采用独特的预紧式双蜗轮传动设计,通过行星齿轮、齿圈达到平稳的无音噪的运行,使用寿命长,无需重新调整。
3.2腕部附加拉丝机
对于铝合金焊接精确的送丝是非常重要的,任何送丝的波动都可能对焊缝形状和成型产生不良影响。焊丝通过安装在机器人笫一轴的送丝机送出,再由腕部附加拉丝机送入焊枪。这样即使焊枪电缆处于运动中,也能保证精确送丝运行功能,因此,通过采用腕部附加拉丝机,可以保证在运动过程之中铝合金焊接精确的拉丝,从而保证轨道交通装备制造中焊接工作的正常进行。
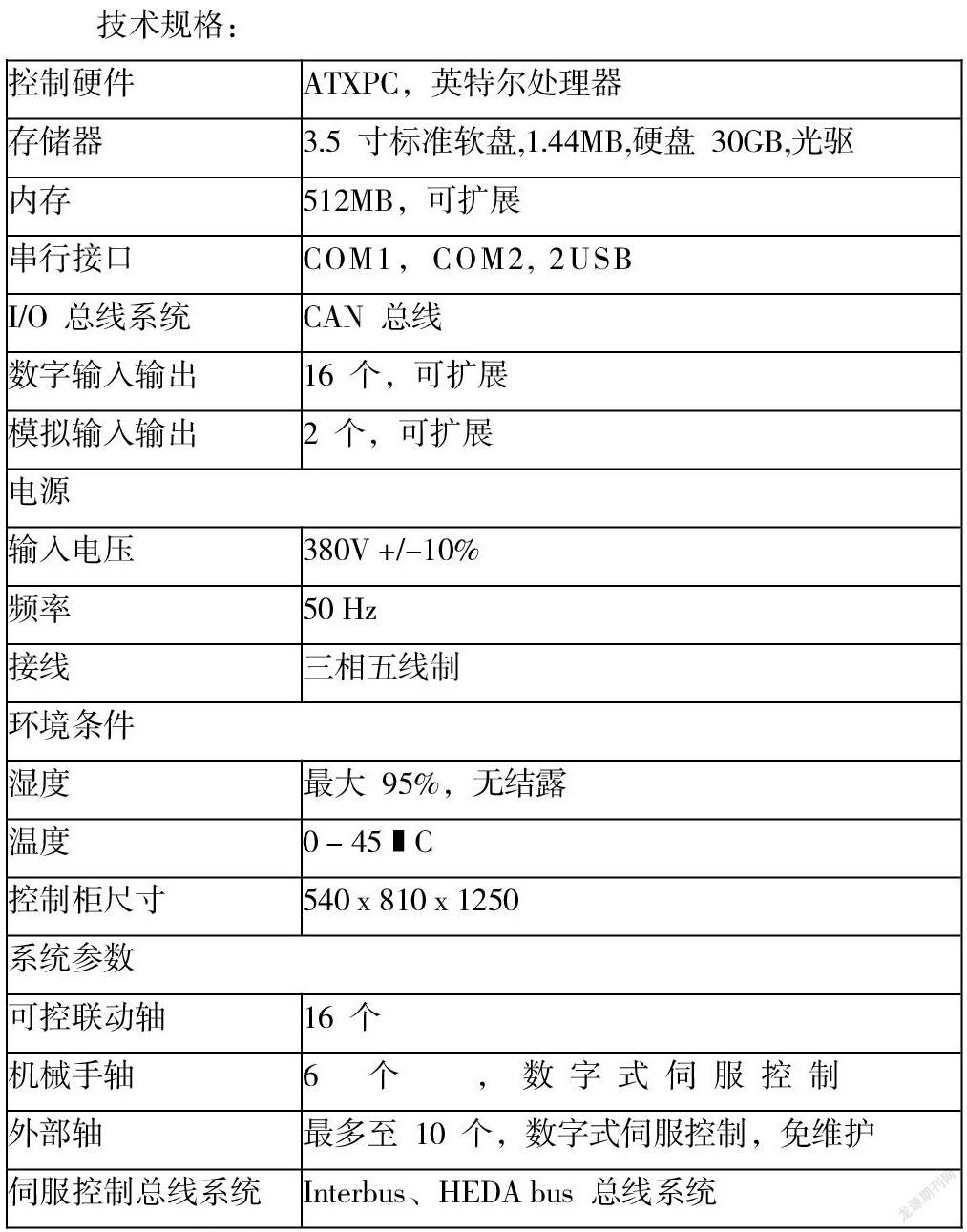
3.3控制系统 RCi
机械手、控制柜和滑轨系统的控制和定位实现全数字化控制,通过 INTERBUS-S 和 HEDA 总线进行数据交换。其最大优点在于数据输送不会受任何干扰信号的影响(此为与模拟信号的最大区别之一),同时大大的加快了数据处理速度,实现更加精确的控制。标准控制柜可实现 16 轴联动控制,从而使得对机械手等系统的控制更加精准,从而使得机械手等系统在轨道交通装备制造之中应用的精确性。
3.4 K5 型示教器
其为与最新的数字化控制系统而开发设计的,与中央控制系统通过总线连接。根据人体工程学设计的示教器重量仅为 1.3 公斤,清晰的按键排列和高解析度 VGA 彩色显示屏充分展示其“指令中心” 的特色。示教编程方式直观易于掌握,软件采用 Windows 平台及视窗界面,不需学习使用任何计算机语言。
在示教器上,通过按键控制机械手到达焊接位置,在相应的界面下选择所需功能并输入相关参数( 如电流、焊接速度等) 即可完成焊接程序的编制,所有界面皆为中文显示。各种坐标系统如“工具坐标”或“工件坐标” ( 可由使用者定义或根据外部轴情况预选) 配合以“ Joint 坐标” ( 各独立轴坐标) 和“ World 坐标” ( 机械手系统坐标) 联合使用,可进一步协助机器人在工作空间内更加方便的定位。各种“宏功能” 如多层焊、焊接顺序、弧坑填充、摆动方式等,在菜单下直接选用即可,极大的减化了程序的编制过程,使得轨道交通装备的制造更为简便有效。
3.5铝合金焊丝用焊枪,型号 SB395
焊枪是为机器人进行铝合金焊接而设计,采用 Teflon 焊丝衬管。具有优良的刚度,碰撞后无需校形。一体式水冷,带有快速接头。
焊枪适于进行气动清理(通过增压后的压缩空气),喷嘴同时可做为寻踪传感器以进行程序转换。
3.6焊枪式焊接烟尘吸收和过滤净化装置
弧焊机械手可配备一个一体化的除尘装置,通过安装在焊枪前部周围的环形吸收嘴保证对焊接烟尘的高效清除,焊接烟尘沿着焊枪颈输送到一个回转接头,此接头安装在焊枪中央接头处,然后通过管道送到烟尘清除过滤装置。
吸收嘴的尺寸能使它安装在气体喷嘴的死角后面,从而保证即使在狭窄工件内部也不防碍机械手的可达性,烟尘导管和旋转式排烟接头适用于不同类型的焊枪,从机械手手腕关节引出的导管与焊枪连接电缆是平行布置的。对于机械手特殊设计的腕关节,配备其一体式排尘接头,可以最大程度地节省由于附加吸尘装置而占用的空间,可以对轨道交通制造装备所使用的机械手进行除尘,从而保证机械手在装备制造过程之中的正常运行。
3.焊接机械手在轨道交通装备制造中的应用
轨道交通装备尤其是城际动车组制造是一项高技术产业,其产品链条涉及众多高新技术领域,包括新型铝合金型材、微电子设备、高精度电气控制设备、精密气动设备等,这些均是技术含量高、附加值高的先进工业产品领域,属于先进制造业,是珠江三角洲地区产业发展的方向,符合珠三角产业发展政策。建设车辆修造基地,促进区域经济产品结构调整和产业优化升级,有利于逐步形成庞大的产业链条,带动地方经济快速发展。因此,为提升轨道交通装备制造的效率,采用焊接机械手来辅助制造过程,在一定程度上促进我国轨道交通装备制造的机械化与智能化。
参考文献
[1]王寿福焊接技术在铁路机车车辆工业中的应用[J],焊接技术,2004,33(3):3-7
