无人船载设备双轴机械稳定平台速度前馈控制方法研究
2021-09-10俞华熊天武
俞华 熊天武


关键词:无人船;双轴机械稳定平台;纵横摇;速度前馈
0引言
舰船由于风浪作用会出现摇摆,引起船载设备如雷达天线的轴线晃动,影响对目标的扫描及测量。为了减小或消除船体摇摆对设备的影响,保证船载设备稳定运行,常见的方法是采用机械稳定方式,驱动机械稳定平台反向摇摆克服船体纵摇及横摇影响,提供一个近似水平的工作平台,从而隔离船体摇摆扰动对船载设备的影响。机械双轴稳定平台能够及时有效地隔离船体纵摇横的影响,通过实时测量平台位置信息调整姿态,保证平台空问稳定,为雷达等舰载设备提供稳定的工作平台,应用广泛。无人船由于体积小,船体摇摆更加剧烈,变化迅速,基于常规的PID控制算法的双轴机械稳定平台不能满足其快速变化动态性能和控制精度要求。本文基于双轴机械稳定平台工作原理设计前馈-PID控制算法,在PID控制算法的基础上,引入速度前馈,通过姿态测量模块实时测量船体摇摆角度及角度变化速度,进行算法运算后驱动伺服机构动作,提高稳定平台控制系统的动态性能与稳定平台控制精度,保证无人船载设备稳定工作。
1双轴稳定平台工作原理
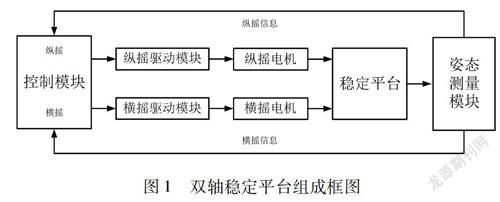
双轴机械稳定平台主要由稳定平台(机械结构)、测量模块(姿态测量传感器)、执行机构(纵横摇力矩电机、驱动器)及控制系统等几个主要部分组成。当船体发生摇摆,产生姿态角度变化时,姿态测量传感器实时测量船体纵摇及横摇角度,驱动纵摇电机及横摇电机反向动作,实现稳定平台机械结构水平方向稳定。稳定平台结构上采用外轴横摇,内轴纵摇的安装方式,姿态测量传感器安装在平台底座上,实时测量船体姿态并将姿态信息送到控制单元进行控制运算。双轴机械稳定平台组成框图如图1所示。
2双轴稳定平台控制策略
2.1稳定平台解耦控制
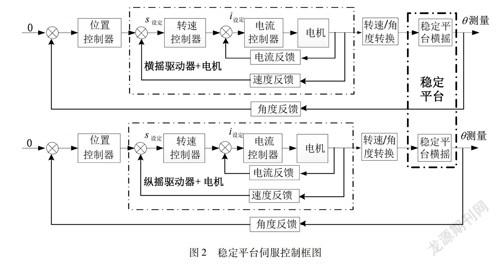
双轴稳定平台控制策略采用解耦控制,根据实时测量的船体摇摆角度对稳定平台的纵摇模块和横摇模块分别进行控制。在实际工作环境下,船体纵摇及横摇对稳定平台的影响是相互耦合的,但在纵摇角或横摇角逐渐向平稳状态(摇摆角度趋向于0)过度的过程中,其相互之间的耦合关系减弱,当其中某一个姿态(纵摇或横摇角度)达到平稳时,其耦合关系消除,因此,在对稳定平台进行控制算法研究时,可以忽略相互之间的耦合关系,对两轴分别进行控制,其稳定平台控制框图如图2所示。纵摇及横摇控制均采用三环控制策略,包括电流环、速度环以及位置环3个组成部分。电流环及速度环集成在电机驱动器模块中,可以有效抑制伺服电机的非线性影响;位置环由控制模块实现,包括姿态测量模块、编码器及控制板,进行稳定平台姿态的检测、运算与控制,实现稳定平台平稳运行。
2.2 PID-前馈控制
PID控制算法是将比例、积分、微分几个部分经过组合构成被控对象的控制变量,其结构简单、易于实现、且不需要被控对象的精确模型,因此被广泛应用。但由于无人船体积小、摇摆幅度大、且摇摆频率高,常规PID控制是基于偏差量的反馈控制,其本质决定了调节作用总是落后于干扰变化量,对于外界快速变化的干扰量调节能力较弱,不能满足快速摇摆下的动态特性与精度要求,因此考虑加入速度前馈。前馈控制的特点是实时观测或者测量干扰作用的大小,并根据测量到的干扰量对被控系统进行实时地调节和控制,能够及时补偿扰动对被控对象造成的影响。前馈控制要求干擾量是可测的,双轴机械稳定平台的干扰量完全来自于船体摇摆,且摇摆变化量是实时可测的,因此可以基于姿态测量模块实时检测纵横摇扰动变化量,建立前馈控制器补偿船体快速晃动带来的影响,提高平台控制精度,保证船载设备稳定高效的工作。
3仿真实验和分析
实际工作过程中,横摇摆动幅度大,对船体姿态影响剧烈,精度控制难度相对较大,纵摇相对影响较小,摇摆幅度小,因此在控制策略研究以及算法设计时主要针对稳定平台横摇控制进行建模仿真及参数整定,纵摇采用与横摇一样的控制策略,控制器参数根据实际所选电机及减速器进行整定。双轴机械稳定平台包含永磁同步电机(PMSM)、驱动器、减速器等非线性模块,是典型的高阶非线性系统,为了降低难度,简化控制器设计流程,对被控对象模型进行降阶和线性化处理,简化为典型的二阶惯性环节。
基于MATLAB/simulink工具进行仿真建模,设计传统PID与前馈-PID控制算法进行仿真实验验证,仿真模型如图3所示,仿真结果分别如图4~5所示。仿真模型输入信号为模拟船体横摇周期性运动的正弦信号,幅值15°,周期为2s。
由图4~5正弦跟踪控制误差曲线及表1性能参数分析结果可知,前馈-PID控制算法能够有效地根据测量的稳定平台干扰量(船体摇摆角度及角速度)对平台姿态进行调节,补偿船体纵横摇的影响,显著提高控制精度,保持稳定平台水平稳定,相对于传统的PID控制算法具有更优的动态性能以及更高的控制精度。
4结束语
本文研究了基于双轴机械稳定平台的PID-前馈控制算法,并基于稳定平台的近似线性化的降阶数学模型建立MATLAB/simulink仿真模型对设计的PID-前馈控制算法进行仿真试验验证。仿真实验结果显示,相对于传统PID控制算法,前馈-PID控制算法具有较快的动态响应和更高的跟踪控制精度,能够有效补偿船体摇摆对稳定平台带来的影响,为工程应用奠定了基础。
