基于PLC控制的机械手系统设计
2021-09-10薛明磊李桦芃
薛明磊 李桦芃





摘要:随着现代工业技术的日渐发展,工业自动化技术要求越来越高。生产情况逐渐向劣势发展,对于一线操作工人的技术要求更高,操作工人的安全系数也有一定的威胁。对于一些往复动作机械手自动控制显的非常重要,这样可以避免了一些必要的的危险。
关键词:机械手;自动控制;PLC
随着我国现代科技和工业生产的进步和飞速发展,机械手已经在国内乃至全球得到了越来越多地使用。所以,机械手对于控制性能的要求也不断增加。采用一种常规继电器控制技术方法的新型机械手控制不可避免地就会出现不必要的问题,例如稳定性较差,电缆数量多,故障率高和系统故障。我们已建议解决这些问题的方法。通过系统采用廉价的新型可编程数字逻辑处理控制器软件来自动设计和运行控制整个操作系统,可以大大提高逻辑控制器在系统正常工作运行时的工作可靠性,降低了系统故障率,方便维护并做好工作。
1机械手概述
机械手臂是现在在机械人技术范畴中得到最广泛实践使用的自动化机械设备,在工业制作、医学医治、娱乐效劳、军事、半导体制作以及太空探究等范畴都能见到它的身影。虽然它们的形状各有不一样,但它们都有一个共同的特色,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
机械手臂依据构造方式的不一样分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等。右图为多见的六自由度机械手臂。他有X移动,Y移动,Z移动,X滚动,Y滚动,Z滚动六个自由度构成。
水平多关节机械手臂通常有三个主自由度,Z1滚动,Z2滚动,Z移动。经过在履行终端加装X滚动,Y滚动能够抵达空间内的任何坐标点。
直角坐标系机械手臂有三个主自由度。X移动,Y移动,Z移动构成,经过在履行终端加装X滚动,Y滚动,Z滚动能够抵达空间内的任何坐标点。
2机械手手臂的构成:
一、运动元件。如油缸、气缸、齿条、凸轮等是驱动手臂运动的部件。
二、导向设备。是确保手臂的准确方面及接受由于工件的分量所发生的曲折和改变的力矩。
三、手臂。起着衔接和接受外力的效果。手臂上的零部件,如油缸、导向杆、控制件等都安装在手臂上。
此外,依据机械手运动和作业的请求,如管路、冷却设备、行程定位设备和自动检测设备等,通常也都装在手臂上。所以手臂的构造、作业范围、承载能力和动作精度都直接影响机械手的作业功能。
3PLC控制程序设计
3.1控制电路设计
本次PLC选用西门子S7-200CPU226,本PLC主机拥有24个I/O口输入,16个I/O口输出,用去8个I/O口输入,剩余8个端口,用去9个输出端口,剩余5个端口。模拟量扩展模块选用EM231,使用1路模拟量输入。触摸屏选用西门子SMART700IE。
3.2主接线图
3.3总程序设计
进行程序的设计之前,先设计出应用程序的总体方案如图3-2,图中把整个程序分成五大块,即主程序、回原点、手动、自动五部分。输入开关按钮键入,I0.0常开触点闭合,程序开始,当触摸屏输入回原点,中间继电器M0.0其常开触点接通,开始执行回原点程序;当触摸屏输入点动,中间继电器M0.1常开触点闭合,开始执行点动程序,其触摸屏输入半自动,中间继电器M0.2常开触点闭合,开始执行半自动程序,其触摸屏输入全自动,中间继电器M0.3常开触点闭合,开始执行全自动程序,采用西门子公司提供的V4.0STEP7MicroWINSP6编程软件进行编程。
4程序调试与功能实现
4.1西门子S7-200的通讯
西门子PLC串行通讯方式有:RS485串口通信、PPI通信、MPI通信、PROFIBUS-DP通信、以太网通信。
一、PPI通讯
PPI协议是S7-200CPU最基本的通信方式,通过原来自身的端口(PORT0或PORT1)就可以实现通信,是S7-200CPU默认的通信方式。
二、以太网通讯
以太网的核心思想是使用共享的公共传输通道,这个思想早在1968年来源于厦威尔大学。1972年,Metcalfe和DavidBoggs(两个都是著名网络专家)设置了一套网络,这套网络把不同的ALTO计算机连接在一起,同时还连接了EARS激光打印机。这就是世界上第一个个人计算机局域网,这个网络在1973年5月22日首次运行。Metcalfe在首次运行这天写了一段备忘录,备忘录的意思是把该网络改名为以太网(Ethernet),其灵感来自于“电磁辐射是可以通过发光的以太来传播”这一想法。1979年,DEC、Intel和Xerox共同将网络标准化。1984年,出现了细电缆以太网产品,后来陆续出现了粗电缆、双绞线、CATV同轴电缆、光缆及多种媒体的混合以太网产品。以太网是目前世界上最流行的拓朴标准之一,具有传传播速率高、网络资源丰富、系统功能强、安装简单和使用维护方便等很多优点。
本次选择PPI通讯使PC机与PLC相连,选择以太网连接触摸屏与PLC。
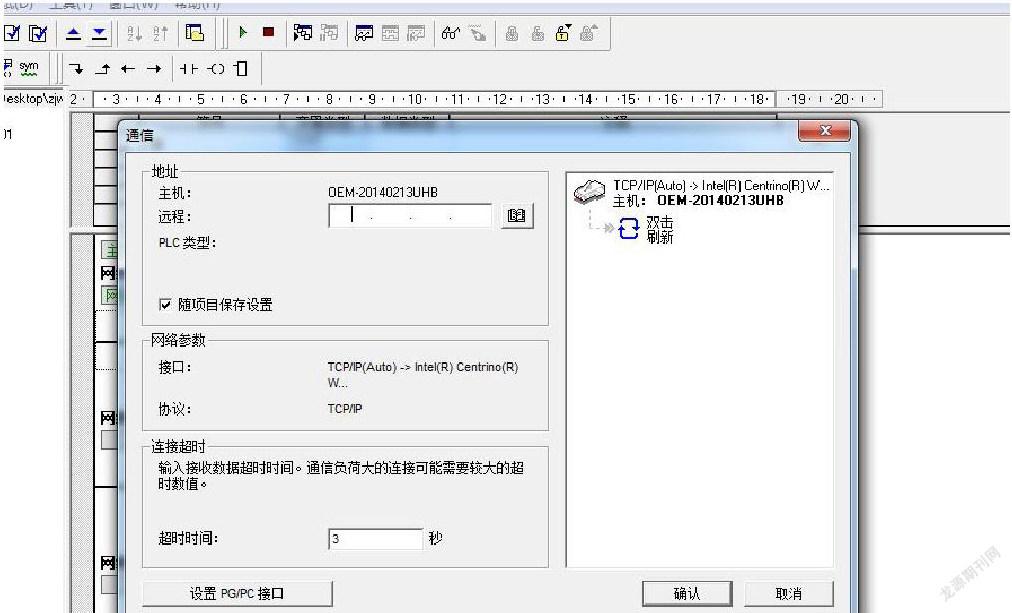
4.2PLC通信
更改PC机的TCP/IP协议,如下图4-1所示:
连接好PLC与PC机,PLC并与触摸屏连接。然后下载程序到PLC与触摸屏。图4-2
通信以后,进行运行调试。
按下开始与回原点,进行回原点后,开始于原点显示灯亮。
然后依次点击触摸屏实现机械手运动与功能实现。
5总结
基于PLC机械手控制系统在工业应用领域已經非常的成熟,它是集机械、液压、电子、控制多种功能于一身的智能化控制系统。
让大家清楚的了解到关于机械手的组成来源及应用领域,和对现代工业自动化的重要性,本文完整的设计了液压式驱动机械手的控制系统在可编程控制器(PLC)和触摸屏的控制下,实现把物料从一个工位传送到另一个工位上,可以准确的定位完成指定动作。这种新型劳动机械手的推广引入大大地地改善了我国企业和大型工厂对于专业劳务者的基本职业技术技能要求以及对于劳动生产量的严格控制,显著地大大提高了我国企业的实际劳动生产率,加快了我国企业快速实现大型工程批量生产的劳动机械化和实现人力资源管理自动化的发展步伐。熟悉了液压系统在控制方面的应用途径;了解了PLC基本工作原理,在完成毕业设计过程中对机械手在工业领域方面有了更加全面的认知。
参考文献
[1]陈洁.现代PLC控制技术与发展[J].2017:55-57.
[2]廖常初主编.PLC编程及应用[M].机械工业出版社,2017:4.
[3]王永华主编.现代电气控制及PLC应用技术[M].北京航天航社,2016:5.
