半转叶轮水轮机载体平台多目标优化设计
2021-09-08于晓峰张旭成孙承坤王孝义张玉华邱支振
于晓峰,刘 聪,张旭成,孙承坤,王孝义,张玉华,邱支振
(安徽工业大学机械工程学院,安徽马鞍山 243032)
国内外能源紧张,潮流能作为一种可预测性强、能量密度大的可再生清洁能源受到广泛关注。潮流电站载体平台主要有漂浮式、桩柱式和座底式,与后两者相比,漂浮式载体平台受水深影响小,可利用表层较高流速,发电效率高。国内外学者针对漂浮式平台的水动力性能进行了相关研究,Birk利用多目标优化算法对平台的形状参数进行优化,以耐波性及有效载荷为目标函数,得到参数集;Jeong等以垂荡响应与筋腱总质量为目标函数对张力腿平台(tension leg platform,TLP)进行优化设计;Carlos 等、Alexandre 等通过在平台上安装垂直襟翼改善平台阻尼特性,提高水动力性能;Thanh等对半潜式深水舱进行非定常水动力模拟,建立了考虑黏滞阻尼和不考虑Morison 单元的势流线性衍射模型,并与实验结果进行对比分析;罗若等利用边界元法求解波浪参数,通过龙格库塔迭代法得到平台的运动响应情况;丁勤卫等通过在平台上附加垂荡板及螺旋侧板改善平台的运动响应;肖嘉任设计一种适用于浅水的浮式平台,对垂荡板进行优化;吕涛等采用BP(back propagation)人工神经网络建立平台主尺寸关键参数多变量预测模型,对平台主尺度进行优化;曲世达设计一种阻尼板平台,利用水动力学软件AQWA 对运动响应及系泊系统进行分析;丘文桢采用多目标粒子群优化算法对平台进行主尺度优化。
文献综述表明,为提高平台的水动力性能,多是通过安装垂荡板或通过流体仿真软件进行主尺度参数优化,较少以平台横摇与纵摇的辐值响应算子(response amplitude operator,RAO)为目标进行主尺参数优化。半转叶轮水轮机是一种新型垂直轴水轮机,具有自启性能优、获能效率高等优点。鉴于此,基于驳船式漂浮平台设计一种适用于半转叶轮水轮机的双体浮式平台,以平台横摇与纵摇的RAO 为目标函数建立理论模型,对平台主尺度参数进行优化,以保证半转叶轮水轮机主体高效运行。
1 半转叶轮水轮机及其载体平台结构
半转叶轮水轮机(简称水轮机)结构如图1,主要由叶片、转臂、对流臂、传动机构和输出轴等组成。水流冲击叶片时,转臂以ω
的角速度转动,叶片以ω
2的角速度同向转动,形成不对称运动。由于其特殊的运动形式,半转叶轮水轮机是一种升阻复合型垂直轴水轮机,获能系数可达0.46。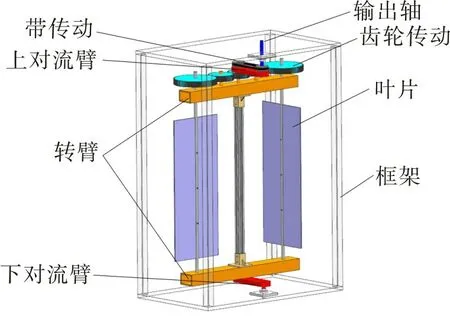
图1 半转叶轮水轮机结构示意图Fig.1 Schematic diagram of HRITT structure
水轮机载体平台采用双体浮式平台(简称平台),结构示意如图2。
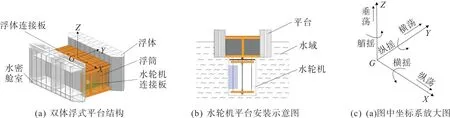
图2 双体浮式结构示意图Fig.2 Schematic diagram of catamaran floating platform structure
由图2(a)可看出,平台主要由浮体、浮筒、水密舱室、浮体连接板和水轮机连接板组成。由图2(c)可看出,平台以平台重心为原点建立坐标系,以双体浮式平台长度方向为X
轴、宽度方向为Y
轴、高度方向为Z
轴。平台在水中有6 个自由度的运动,沿X
,Y
,Z
轴方向的移动分别为纵荡、横荡和垂荡,沿X
,Y
,Z
轴方向的转动分别为横摇、纵摇和艏摇。水轮机有对流机构,艏摇不会对水轮机获能系数造成影响;横荡、纵荡与垂荡对水轮机影响甚小,因此文中分析横摇与纵摇对水轮机的影响。2 水轮机横摇与纵摇许用角的数值模拟
平台横摇与纵摇会导致水轮机发生同步的横摇与纵摇,采用计算流体动力学(computational fluid dynamics,CFD)方法对水轮机横摇与纵摇许用角进行数值模拟计算。
2.1 水轮机横摇与纵摇模型的建立
基于CFD 建立水轮机横摇与纵摇模型,如图3。图中长方体框架为流场域,叶轮模型放置在流场域中心,转臂对叶轮获能系数影响甚小,可忽略转臂的影响。XYZ
为全局坐标系,来流方向为X
轴正方向,转臂绕Y
轴旋转。横摇与纵摇分别是平台绕X
,Y
轴转动形成的,横摇角为φ
,纵摇角为β
。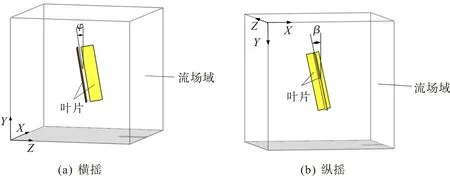
图3 水轮机横摇与纵摇模型Fig.3 Model of rolling and pitching of turbine
对水轮机横摇与纵摇模型进行数值计算,得到叶片受力与力矩,为计算水轮机在不同横摇角与纵摇角下的获能系数,建立半转叶轮的水动力模型,如图4。以转臂中心建立全局坐标系XOZ
,以叶片自转中心为原点建立局部坐标系ηAγ
和ηBγ
。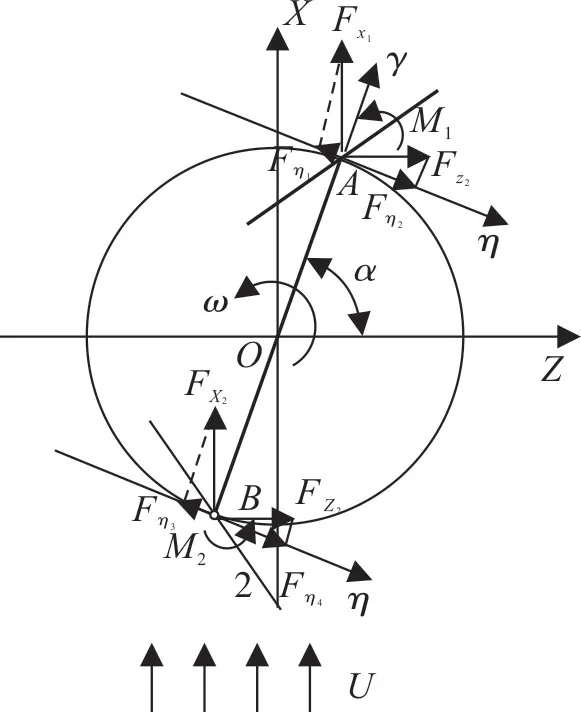
图4 叶轮水动力计算模型Fig.4 Calculation model of impeller hydrodynamic
在CFD 数值模拟中,叶片1 与2 在X
,Z
轴上分力为F
,F
,F
,F
,绕各自转轴的转矩为M
和M
。力与力矩传递到转臂上,对转臂产生转矩。


R
为转臂半径;n
为转臂转速;ρ
为流体密度;s
为水轮机扫掠面积;u
为来流速度。2.2 水轮机横摇与纵摇许用角的数值模拟计算结果
平台横摇与纵摇对水轮机获能系数影响如图5。
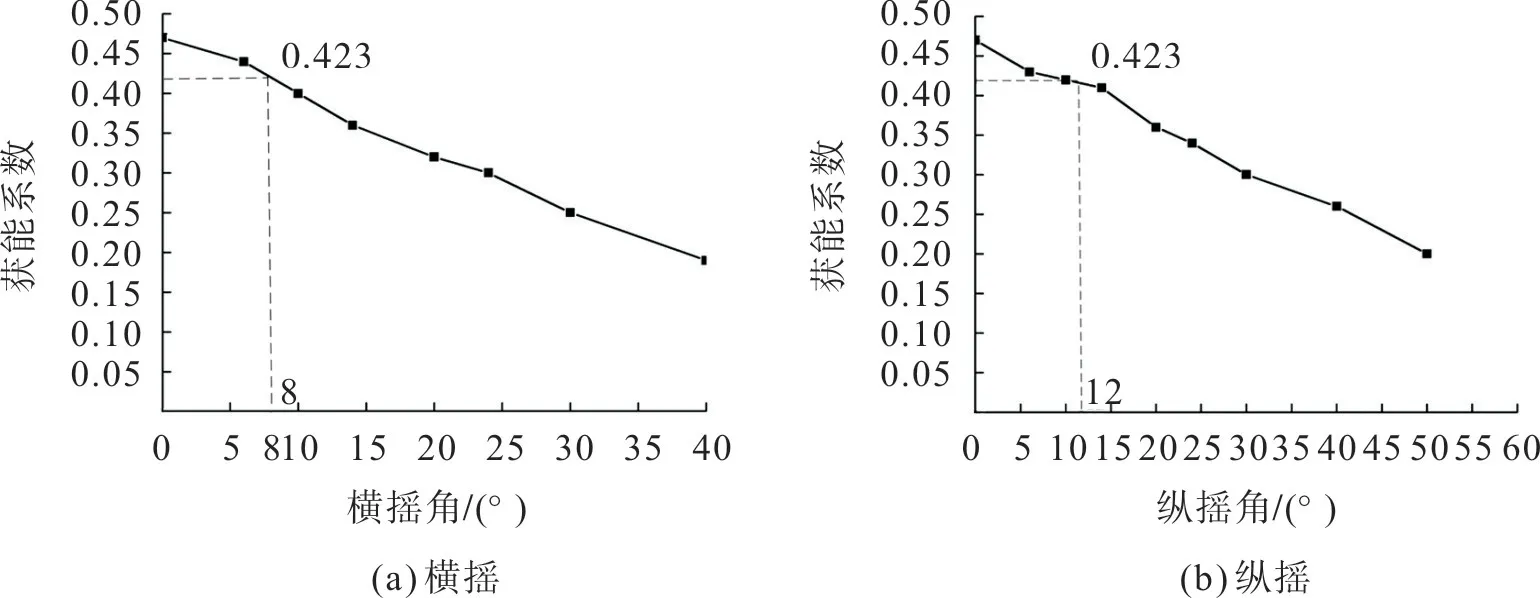
图5 平台横摇与纵摇对水轮机获能系数的影响Fig.5 Influence of platform rolling and pitching on turbine power coefficient
由图5 可知:平台横摇与纵摇对水轮机获能系数的影响趋势一致,获能系数均随横摇角、纵摇角的增大而减小;为保证水轮机获能系数不低于原来的90%,即不小于0.423,水轮机横摇许用角范围为(0°,8°),纵摇许用角范围为(0°,12°)。
采用RAO表征平台的运动响应,RAO为不同波浪频率、幅值为1的波浪引起的平台自由度幅值,即平台发生横摇与纵摇后其幅值响应算子也称平台横摇与纵摇角。要保证水轮机高效稳定运行,就要使平台横摇与纵摇的RAO 在水轮机横摇与纵摇的许用角范围之内。横摇与纵摇的RAO 主要与平台的主尺度参数有关。因此,建立平台横摇与纵摇RAO的理论分析模型,对其主尺度参数进行优化,使其满足要求。
3 平台横摇与纵摇幅值响应算子理论模型
3.1 平台主尺度参数
图6 为平台主尺度参数示意图。其中:B
为浮体宽度,1.2 m;L
为平台长度,5.0 m;H
为平台高度,2.4 m;h
为水密舱室高度,0.3 m;h
为浮筒高度,2 m;B
为浮筒长度,1.8 m;B
为浮筒宽度,0.4 m。
图6 平台参数示意图Fig.6 Schematic diagran of platform parameters
平台主尺度参数相互之间的关系如式(6)。

m
为浮体质量,m
=624B
LH
;m
为水密舱室质量,m
=6 300B
Lh
;m
为浮筒质量,m
=92B
B
h
;m
为连接板质量,m
=27B
L
;m
为水轮机质量;m
为平台总质量。3.2 模型的建立
3.2.1 平台横摇幅值响应算子理论分析模型
平台横摇是平台绕重心位置沿X
方向旋转φ
,如图7。为便于计算,在平台底部建立坐标系XYZ
,横摇角为φ
;O
和O
分别为平台横摇后出水OMM
和进水ONN
的形心;a
为平台吃水深度;G
为平台重心,平台发生横摇前后重心位置保持不变;B
和B
分别为平台横摇前后浮心位置;V
和V
分别为平台出水和进水的体积。当浮式海上平台发生横摇后,浮力的作用线垂直于C
D
,与横摇前的浮力作用线相交于S
点,即为横稳心。当横摇角φ
较小时,可将BB
看作为C
D
弧线,BS
为横稳性半径。浮心移动距离L
为:
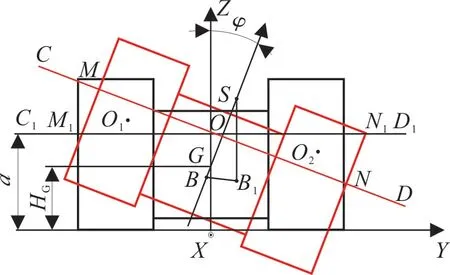
图7 平台横摇模型Fig.7 Rolling model of platform

φ
≈φ
,即
对式(11)进行拉普拉斯变换求解,可得平台横摇的频率响应函数:

α
为浪向角。3.2.2 平台纵摇幅值响应算子理论分析模型
图8 为平台纵摇理论分析模型。图中:β
为纵摇角;点O
和O
分别表示平台在发生纵摇后出水OEE
和进水OFF
的形心。当平台发生纵摇后,浮力的作用线垂直与-- ——A
K
,S
为纵稳心,——BS
为纵稳性半径。计算方法与横摇类似,此处不予说明,纵摇的计算结果如下: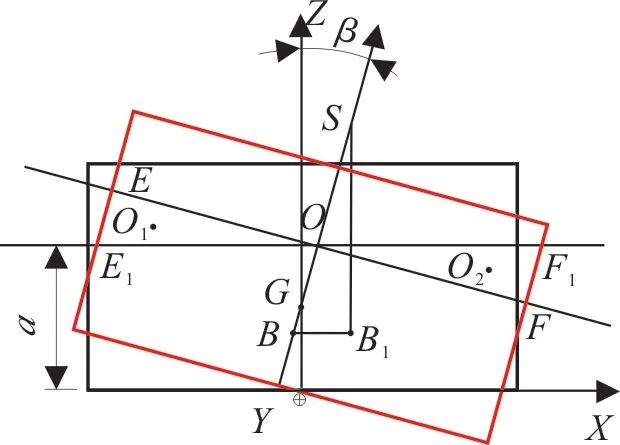
图8 平台纵摇模型Fig.8 Pitching model of platform
3.3 模型的验证
为验证平台横摇与纵摇RAO 理论分析模型的有效性,利用ANSYS AQWA 软件对平台横摇与纵摇的RAO进行数值模拟。模型具有对称性,因此只计算浪向角为0°~90°的结果。浪向角为0°,30°,60°和90°的横摇与纵摇的RAO理论模型与数值模拟结果如图9。
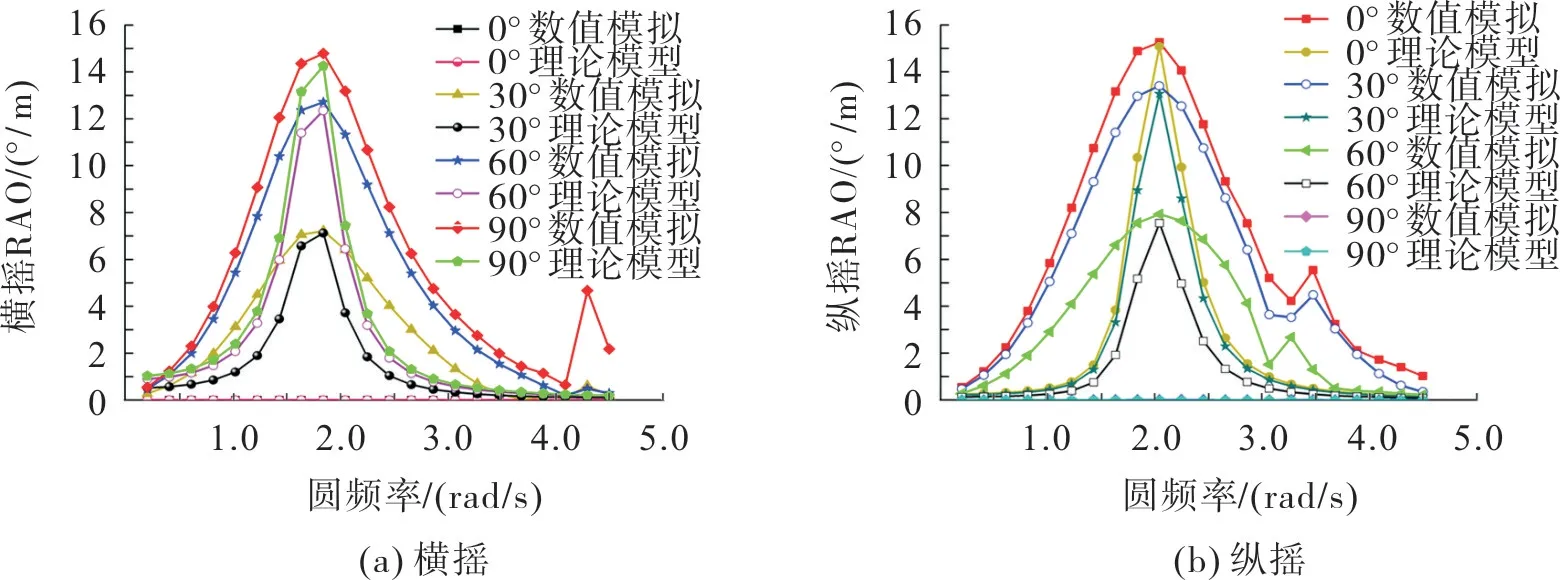
图9 平台横摇与纵摇数值模拟与理论模型的计算结果对比Fig.9 Comparison between numerical simulation and theoretical calculation results of platform rolling and pitching
由图9可见,平台横摇与纵摇的理论模型与数值模拟计算的最大RAO 基本一致,可满足使用要求,验证了平台横摇与纵摇RAO理论分析模型的有效性。
4 平台主尺度参数的多目标优化设计
为保证水轮机稳定高效发电,以平台横摇与纵摇的RAO 为目标函数、尺寸约束及平台的稳定性为约束条件对其进行多目标优化。
4.1 平台结构参数的多目标优化
4.1.1 设计变量
选取独立结构参数作为设计变量,如

4.1.2 多目标优化函数
1)平台横摇RAO目标函数
横摇幅值响应算子(RAO(X
))是衡量横摇角的指标,以平台横摇RAO最小为设计目标,其目标函数为
2)平台纵摇RAO目标函数
纵摇幅值响应算子(RAO(Y
))是衡量纵摇角的指标,以平台纵摇RAO最小为设计目标,其目标函数为
3)综合评价函数的构建
根据水轮机横摇与纵摇许用角范围,采用线性加权和法构造多目标优化的综合评价函数,如

w
,w
分别为式(13),(14)的加权系数,考虑到横摇与纵摇的许用角范围,取w
= 0.
6,w
= 0.
4。4.1.3 约束条件
双体浮式平台是小型化、模块化的平台,结构参数有限制,设计变量的约束条件:

4.2 优化算例
采用fmincon函数求解平台主尺度参数优化问题,优化前后的结构参数如表1。为检验多目标优化设计对平台横摇与纵摇幅值响应算子的改善情况,对优化后的结构进行数值模拟计算,结果如图10。

表1 优化前后的结构参数Tab.1 Structural parameters before and after optimization
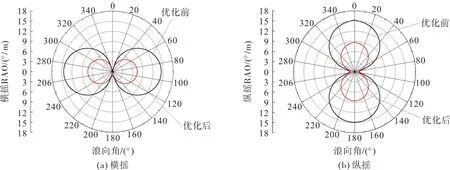
图10 平台横摇与纵摇RAO优化前后对比Fig.10 Comparison before and after RAO optimization of platform rolling and pitching
由图10 可看出:优化后的横摇与纵摇幅值响应算子降幅分别为49.35%和42.47%;相比于纵摇,横摇的幅值响应算子降幅明显,优化后的平台最大横摇角与纵摇角在水轮机许用角范围之内,达到优化目标。
5 结 论
1)半转叶轮水轮机是一种升阻复合的新型垂直轴水轮机,横摇与纵摇对水轮机的获能系数产生影响,数值模拟结果表明,横摇许用角范围为(0°,8°),纵摇许用角范围为(0°,12°)。
2)基于频率响应法建立平台横摇与纵摇的RAO 理论分析模型,利用拉普拉斯变换计算横摇与纵摇的RAO,利用ANSYS AWQA数值模拟验证了理论模型的有效性。
3)以平台横摇与纵摇的RAO为目标函数,尺寸约束与平台的稳定性为约束条件对平台主尺度参数进行多目标优化,平台的最大横摇角与纵摇角分别为7.49°与8.78°,优化前后横摇与纵摇的RAO 的降幅为49.36%和42.46%,能够保证半转叶轮水轮机高效稳定运转。
