基于数值实验的舱外航天服肩法兰布局优化研究
2021-09-01管鲲甯李潭秋李道奎李元丰
管鲲甯, 李潭秋, 李道奎, 李元丰
(1.国防科技大学空天科学学院, 长沙 410073; 2.中国航天员科研训练中心, 北京 100094)
1 引言
航天员着舱外航天服后的活动性是保证航天员顺利完成出舱任务的前提,取决于航天服上躯干结构与人体上肢生理参数的符合程度。 上躯干结构对人体上肢运动的影响通过肩法兰对上肢运动的限制实现。 航天员着舱外航天服时,其双臂通过上躯干的肩法兰开口穿入舱外服上肢组件,因此肩法兰的布局对人体着服后上肢的活动范围影响至关重要。
NASA 的Z-2 航天服在Z-1 航天服的基础上进行改进,缩减了左右肩法兰中心距,并对肩法兰的空间角度进行了优化[1]。 但该优化需要大量的工程研制经验作为支撑,时间周期较长;Williams[2]通过人体扫描方法获得人体上肢在活动过程中与肩法兰的作用关系,研究表明肩法兰对人体上肢活动的限制体现在对人体肩部以及上臂的挤压,会对人体造成伤害,影响上肢活动能力。Heather[3]设计肩法兰模拟装置研究肩法兰布局随人体上臂活动的变化情况,结果表明肩法兰布局与人体上肢活动间存在明显的相互关系,并获得了肩法兰位置及空间角度与上肢活动情况的回归模型。 但上述研究对上肢活动的表达尚不充分,得到的结论无法阐释肩法兰对上肢活动性影响的原因。 李元丰等[4-6]根据上躯干结构组成研制了上躯干结构原理样机,开展了肩法兰与上肢活动相关性实验,得到了肩法兰设计因素与单、双手操作空间相对体积的关系,但因相关性实验缺乏对人体肩关节、肘关节的系统分析,且普适性不足,难以覆盖肩法兰的所有布局方案。
本文根据人体上肢生理学特点,分析肩法兰对人体上肢活动的影响方式,在人体上肢可达域运动学模型的基础上增加肩法兰约束,建立肩法兰与人体上肢耦合模型;并针对4 个设计因素(左右肩法兰中心间距l,肩法兰内径d,角度γ以及角度α),开展数值仿实验,研究肩法兰各设计因素对人体上肢活动性的影响,以获得舱外航天服肩法兰布局与人体上肢活动的相互作用关系,为肩法兰布局方案的设计与评价提供参考。
2 舱外航天服肩法兰与人体上肢耦合模型
2.1 人体上肢可达域运动学模型
依据Klopcar 等[7-8]的研究结果,利用Matlab编程建立1 种3 刚体7 自由度的人体上肢可达域运动学模型,如图1 所示。 人体坐标系中心定义于内肩关节中心,x轴沿人体冠状轴方向,y轴沿人体矢状轴方向,z轴沿人体垂轴方向,则有式(1)所示耦合关系[9-10]:

图1 上肢可达域运动学模型Fig.1 Kinematics model of upper limb reachable area

式中,φrp、φde表示内肩关节绕x、y轴转动角度;φA、φF、φR分别代表肩关节外展/ 内收、前屈/后伸以及旋内/ 旋外的活动角度;φEF表示肘关节的屈/伸运动角度;rSG、rH、rF分别表示肩胛带向量(即内、外肩关节中心距离向量)、上臂向量和前臂向量;rw为腕关节中心位置向量,R代表关节绕相应方向的旋转矩阵。 在上肢运动过程中,各个关节的活动间存在耦合关系[11-12]。
2.2 肩法兰与人体上肢耦合模型
肩法兰对肩关节复合体运动的约束如图2 所示,红色圆环表示的肩法兰对肩关节复合体运动的约束明显。 当肩法兰的相对位置位于人体肩宽内部时,对锁骨的摆动和肩胛骨的滑动范围进行了约束,因此大大影响了上肢的运动范围。 肩法兰对上臂的活动范围也有限制作用,主要是通过物理碰撞实现。

图2 肩法兰对肩关节复合体运动的约束Fig. 2 Constraints of shoulder flange on shoulder joint complex
肩法兰布局的设计因素包括:左右肩法兰中心距离l,肩法兰内径d,角度γ以及角度α,其中,角度γ和α是肩法兰的空间角度[13]。 角度γ定义为肩法兰绕其局部坐标系z轴转角,角度α为肩法兰绕局部坐标系y轴转角,肩法兰角度定义如图3 所示。 在模型中,通过调整肩法兰各个设计因素可实现肩法兰布局的变换,而肩法兰布局的设计过程即确定各个设计因素参数的过程。

图3 肩法兰角度定义Fig.3 Definition of shoulder flange angle
本文搭建了肩法兰与人体上肢耦合模型。 首先建立人体上肢可达域运动学模型,然后以人体上肢可达域运动学模型为基础,对上肢运动施加肩法兰的限制,建立基于Matlab 的肩法兰与人体上肢活动耦合模型。 肩法兰与人体上肢活动耦合模型示意图如图4 所示,图中不同颜色的圆环可视作位于不同空间位置的肩法兰。

图4 肩法兰与人体上肢耦合模型示意图Fig.4 Coupling model of shoulder flange and human upper limb
在耦合模型程序的运算中,在进行上肢结构与肩法兰碰撞情况判定之前,需设定碰撞阈值,该阈值依据人体几何参数选取。 本文选取上臂和前臂的半径分别作为人体上臂和前臂的碰撞阈值。
以上肢的各个结构与肩法兰的碰撞情况判定对应的上肢可达位置是否有效,若某一可达位置对应的上肢结构与肩法兰的距离小于碰撞阈值,则认为此时人体上肢与肩法兰发生碰撞,因此对应的上肢可达位置无效。
耦合模型以人体肩关节以及肘关节活动范围作为输入,以腕关节中心作为参考点,按照各个关节角度的耦合关系约束各关节角度的取值范围,在6 个关节角度活动范围内选取合适的步长进行循环迭代运算,以获得相应的腕关节中心点位置。通过上肢结构与肩法兰的碰撞判定,剔除上肢与肩法兰发生碰撞所对应的标记点位置,即可获得肩法兰约束下人体上肢活动的可达域空间。
通过改变肩法兰设计因素的参数,可得不同肩法兰布局下人体上肢可操作空间的体积。 通过改变肩法兰的4 个设计因素的参数,可运算获得不同肩法兰设计下的单、双手可达域空间体积。
3 基于耦合模型的数值实验
3.1 实验设计
为探求肩法兰对上肢活动的影响,以人体上肢活动能力作为实验考察的因变量。 可达域是描述上肢活动能力的重要指标,临床上常用可达域来测试、表征关节活动性能[7],结合舱外航天服上肢组件活动性能研究中常用可达域作为评价指标[14],本实验利用可达域空间作为表征上肢活动性能的定量指标。
根据舱外服的使用背景定义了单手、双手可达域空间体积2 种考察指标。 单手可达域空间体积是指单只手臂活动过程中可到达的空间区域的体积,实验中以右手臂为实验对象,利用耦合模型计算右手臂在肩法兰约束下的可达域空间体积大小。 同时考虑到出舱活动中,大多数的任务需航天员双手协同完成,仅考察单手空间不足以描述肩法兰对人体上肢活动性的影响,因此定义了双手可达域空间,也即左右双手可同时到达、完成操作的空间区域,即左右单手可达域空间的交集空间。
正交实验设计是安排多因素实验、寻求最优水平组合的高效率实验设计方法[15]。 根据正交实验设计的特点以及本实验研究需求,采用正交实验方法设计实验,并采用极差、方差以及回归分析方法进行分析。
本实验以建立的舱外服肩法兰与人体上肢耦合模型为平台,基于Matlab 程序开展计算机数值实验,分别对肩法兰的4 个设计因素进行赋值,完成单、双手可达域空间体积的计算。
3.2 参数设置
首先需设定各个实验因素的水平数及水平值。 根据Heather[3]研究,人体上肢在活动过程中,γ、α平均值的范围分别为式(2):

依据舱外服上躯干结构的研制经验及人体几何尺寸标准,左右肩法兰中心距l、肩法兰内径d的取值范围设定见式(3):

李元丰等[4-6]根据上躯干结构的组成研制了上躯干结构原理样机,并获得了角度γ与角度α水平范围的验证,见式(4):

正交实验因素水平设定如表1 所示。 实验因素是肩法兰的设计因素。

表1 正交实验因素水平Table 1 Factor level of orthogonal test
由于实验因素的水平数相同,且不考虑肩法兰各设计因素间的交互作用,可选用L16(45)正交表安排实验方案,如表2 所示。

表2 正交实验方案Table 2 Orthogonal test plan
3.3 实验结果
数值实验设计因素及单、双手可达域空间体积见表3。 通过对比发现,各种肩法兰布局对上肢活动的限制非常明显,且与单手可达域空间体积相比,双手可达域空间体积受影响程度更大。

表3 单、双手可达域空间体积结果Table 3 Results of one-hand and two-hand reachable domain space volume
根据正交实验的分析方法,计算各个实验因素的Ti及mi及R(表4)。 其中T为总体积,m为平均体积,i表示各因素的水平编号。 表中的最后一行为同一列的mi之中最大值与最小值的差,称为极差,以R表示。 极差是衡量数据波动大小的指标,极差大说明该因素对考察指标的影响大,是主要影响因素;极差小就表示该因素对考察指标的影响小,是次要影响因素[16]。

表4 单、双手可达域空间体积正交实验分析结果Table 4 Orthogonal experiment analysis of one-hand and two-hand reachable space volume
通过对比极差的大小可知,在l、d、γ、α4 个设计因素中,对于单手操作空间体积,角度α因素是主要因素,以下因素按照重要性排序依次是l、d、γ;对于双手操作空间体积,肩法兰内径d因素是主要因素,以下因素按照重要性排序依次是α、l、γ。
为了直观地分析各个因素对上肢活动能力的影响,绘制了实验因素与考察指标关系的趋势图(图5)。
由图5 可以看出,当左右肩法兰中心距l为370 mm,肩法兰内径d为240 mm,角度γ为25°,角度α为60°时,单手可达域空间体积最大。

图5 单手可达域空间体积与各影响因素关系趋势图Fig.5 Trend of relationship between the spatial volume of one-hand reachable domain and influencing factors
由图6 可以看出,当左右肩法兰中心距l为390 mm,肩法兰内径d为240 mm,角度γ为15°,角度α为60°时,双手可达域空间体积最大。

图6 双手可达域空间体积与各影响因素关系趋势图Fig.6 Trend of relationship between the spatial volume of two-hand reachable domain and influencing factors
由于直观分析法得到的最佳水平组合未出现在16 次实验中,需进一步追加验证实验。 通过模型计算求出的最佳水平组合下单手可达域体积为255.7603 dm3,表明当左右肩法兰中心距l为370 mm,肩法兰内径d为240 mm,角度γ为25°,角度α为60°时,肩法兰对单手可达域空间体积的限制最小。
通过模型计算求出的最佳水平组合下双手可达域体积为37.4354 dm3,表明当左右肩法兰中心距l为390 mm,肩法兰内径d为240 mm,角度γ为15°,角度α为60°时,肩法兰对双手可达域空间体积的限制最小。
为准确估计误差大小,评估各因素对上肢活动能力影响的显著水平,采用多因素方差分析对实验结果进行分析[17]。
单手可达域空间体积实验数据的方差分析结果如表5 所示,可以看出,因素α 对单手可达域空间体积影响非常显著,因素l、d、γ对单手可达域空间体积影响显著。

表5 单手可达域空间体积方差分析Table 5 Variance analysis of one-handed reachable area volume
双手可达域空间体积实验数据的方差分析结果如表6 所示,可已看出,因素l、d、γ、α对双手可达域空间体积影响都非常显著。 以上分析结果与直观分析法的结论一致。

表6 双手可达域空间体积方差分析Table 6 Variance analysis of two-hand reachable area volume
通过对图5 分析发现,单手可达域空间体积与d、α因素呈线性关系;与l、γ因素的关系无法以线性关系描述,应引入更高阶次项。 设单手可达域空间体积为y1,左右肩法兰中心距l、内径d、角度γ、角度α分别是x1,x2,x3,x4。 设回归模型为式(5):

式中,α0,α1,α2,α3,α4,α5,α6为回归方程系数,对实验数据进行回归分析,可获得回归方程式(6):

通过对图6 的分析发现,双手可达域空间体积与l、d、γ、α因素都呈线性关系。 设双手可达域空间体积为y2,左右肩法兰中心距l、内径d、角度γ、角度α分别是x1,x2,x3,x4。 设回归模型为式(7):

式中,α0,α1,α2,α3,α4为回归方程系数,对实验数据进行回归分析,可获得回归方程式(8):

4 实验验证及预测结果
以身高为170 cm 男性为例,采用耦合模型计算无肩法兰约束和有肩法兰约束的上肢有效可达域空间。 根据GJB36A-200 和GB10000-88 中人体尺寸标准,模型中的人体参数设置如表7 所示,人体上肢活动角度范围如表8 所示。

表7 人体模型参数Table 7 Parameters of human model
4.1 耦合模型实验验证
表9 为无肩法兰约束人体上肢可达域空间体积的模型计算结果与文献数据的对比,表明本文计算结果与Klopcar 等[7]研究相比差异很小,且处于文献[7]的误差区间内,说明本文模型对可达域空间体积的计算较准确,证明所建立的人体上肢可达域模型的有效性,可进一步用于肩法兰与人体上肢耦合模型的研究。

表9 无肩法兰约束人体上肢可达域空间体积对比Table 9 Comparison of spatial volume of human upper limb reachable area domain without shoulder flange /dm3
表10 为肩法兰约束下上肢可达域空间体积的模型计算结果与文献数据及实验测量的对比,计算结果与李元丰等[4]研究相比差异很小,表明耦合模型对上肢可达域空间体积的计算较准确,证明所建立的肩法兰与人体上肢耦合模型是有效的。 另外,同表9 中数据相比可知,肩法兰对人体上肢可达域空间具有显著影响。

表10 有肩法兰约束人体上肢可达域空间体积对比Table 10 Comparison of spatial volume of human upper limb reachable area domain with shoulder flange /dm3
通过模型计算和实验测量对比,虽然所建立的肩法兰与人体上肢耦合模型在某些方面对肩法兰与人体上肢活动关系描述尚有不足,但仍可以较准确地反映肩法兰对人体上肢有效可达域空间的影响。
建模过程中,模型对人体上肢的结构进行了简化,尤其是肩复合关节,虽然该简化可以较好地表达上肢的运动特性,但对于几何形态的描述缺乏足够精度,会带来一定偏差。 模型计算中,人体上肢的有效可达域空间是三维不规则形态,其边界不是连续曲面,另外Matlab 软件是通过拟合来计算可达域体积,难免导致误差的累积。
受以上因素的影响,模型计算的结果与实验结果存在一定的偏差,但考虑实验操作、数据处理等过程的误差,可以认为模型具备一定的合理性,可作为数值模拟实验的平台。
4.2 回归模型预测效果
为验证回归模型的预测效果,本文设计了6次验证实验。 分别按照6 种不同的肩法兰布局方案,将回归方程得到的人体上肢单、双手可操作空间体积拟合计算值与耦合模型程序运算得到的计算结果进行对比。 对比结果如图7 所示,可以看出耦合模型与回归模型符合程度较高。
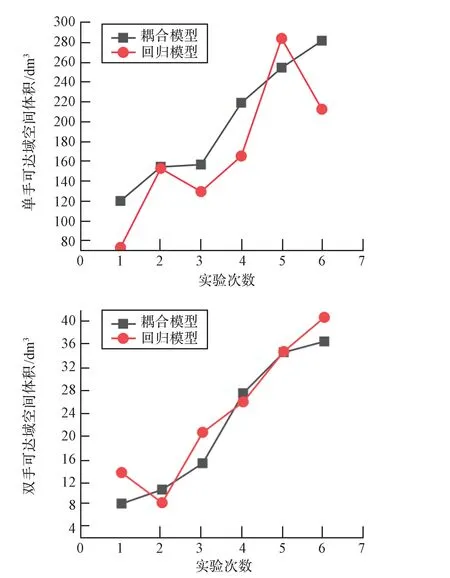
图7 回归模型预测效果Fig.7 Regression model prediction effect
考虑实验操作、数据处理等过程存在的误差,可以认为单、双手可达域空间体积回归模型的计算误差在可接受范围内,验证了所建立的回归模型的有效性。
5 讨论
舱外服肩法兰的设计因素包括左右肩法兰中心距l、肩法兰内径d、角度γ和α,通过改变以上设计因素可实现肩法兰布局的变换,肩法兰布局的设计就是确定这4 种设计因素参数的过程。 上躯干肩法兰结构与人体上肢活动具有显著性相关性。 本研究通过计算机数值实验研究肩法兰与人体上肢活动的相关性,旨在明确肩法兰的各个设计因素对上肢活动的影响,为进一步肩法兰布局的改进优化提供依据。
在研究指标的设定上,本文提出了更能全面描述上肢活动能力的可达域空间体积指标。 实验结果表明,单、双手可达域空间体积指标可以有效区分不同肩法兰布局形式对人体上肢活动的影响。
统计结果表明,肩法兰的4 个设计因素对单、双手可达域空间体积都有显著或非常显著的影响。 各个因素对单手操作空间相对体积的影响排序为α、l、d和γ。 各个因素对双手操作空间相对体积的影响排序为d、α、l和γ。
根据前人研究得出各个实验因素的交互作用项对上肢活动性的影响不显著,因此本文在设计实验方案时未包含交互作用因素。 从实验结果分析,尤其是在回归分析获得的回归方程中,d、α、l和γ影响显著,可以有效地描述设计因素对上肢活动能力的影响,而方程中并不包含交互项,因此可以佐证各因素的交互作用对于上肢活动能力的影响并不显著。
6 结论
本文基于肩法兰与人体上肢耦合模型,采用数值实验方法研究了航天服肩法兰布局与人体上肢活动的关系,结论如下:
1) 单、双手可达域空间体积指标可以有效地区分不同肩法兰布局形式对人体上肢活动的影响,是衡量肩法兰对人体上肢活动影响的有效指标。
2) 在肩法兰的4 个设计因素中,角度α是影响单手操作空间的主要因素,其次是左右肩法兰中心距l,肩法兰内径d以及角度γ。d是影响双手操作空间的主要因素,其次是α,l以及γ。 肩法兰的设计因素对单、双手可达域空间体积有显著的影响,可以采用关系式来描述。
3) 单、双手可达域空间体积回归模型可较好预测各种肩法兰布局对上肢活动的影响,可用于肩法兰布局方案的设计与评价,为未来舱外航天服躯干结构的设计提供参考依据。
