基于有向图与对偶图的概念设计过程模型
2021-08-24李飞扬龚发云
汤 亮, 李飞扬, 龚发云
(1.湖北工业大学 机械工程学院, 湖北 武汉 430068; 2.湖北省制造业创新方法与应用工程技术中心, 湖北 武汉 430068)
0 引言
概念设计阶段研究的重点是设计过程建模, 即采用合适的方法对概念设计过程进行恰当的描述、 表达和操作,使其更充分体现产品特征,满足用户需求。基于功能-行为-结构的FBS 模型的提出, 为不同层次的信息组合提供了途径[1]。基于图语言和树模型(用节点表示元件,边表示元件间能量流动的方式; 用有向图和邻接矩阵描述设计约束等)的产品设计信息建模,不仅可以描述设计组成的行为准则, 也可以通过矩阵来表示功能与结构之间的映射,实现产品的拓扑设计[2-3]。
根据功能-结构映射机制, 可将设计知识表达为功能-行为-结构的映射模式,功能与行为映射由原理库和本体库支持;行为与结构的映射由结构库和样体库支持[4-7]。根据上述描述,杨琨等[8]基于设计流构建了功能知识库、行为效应库和结构实例库用于咖啡机的创新求解; 宫琳等[9]提出产品-功能-结构设计模型,对产品知识、功能知识、结构知识进行了表示,用于对美容补水器创新求解。以上设计方法存在共同的问题, 它们都是面向过程的描述性框架,而非提出一个对设计活动完整解释的方法,其结果是在观察-描述-规范设计过程中缺乏解释环节,因此存在逻辑断层; 另一个问题是上述各种方法没有明确的预期效果,所以难以严格验证。
针对以上问题, 本文提出了基于有向图与对偶图的产品概念设计过程模型,认为概念设计过程是从功能-特性-特征三个方面来描述并求解的过程,最后以张拉机概念设计为例对该过程作了详细阐述。
1 概念设计过程建模
概念设计的一般过程是从明确设计需求开始, 为各项功能找到满足要求的原理解, 通过原理解的组合生成多种方案,最后通过评价选择最优方案。本文的概念设计过程可描述为: 需求分析-功能结构-特性提取-结构特征,如图1 所示。 需求分析即明确设计目标,通过抽象化拟定功能结构;功能结构建立之后,并不能直接转化功能为结构,需要在功能-结构之间引入特性,即效应;特征是结构的几何参数和材料参数。

图1 概念设计过程模型
1.1 产品功能结构
为了更容易求解出产品结构, 需要将总功能分解为易于实现的功能元。产品功能分解应满足以下原则:①在每一级分解中,各级功能都应当是本级中最基本的功能;②同级功能之间应当满足独立公理[11]。
功能结构建立步骤:①通过分析顾客需求,抽象待设计产品的总功能,即待设计产品或系统总的输入/输出关系,输入/输出由能量流、物料流、信息流组成;②将产品的总功能进行分解, 并使用功能基建立功能树; ③引入流,从功能树底层对物质流、能量流、信息流进行追踪,建立每个输入流的功能链。 功能链可分为串行功能链和并行功能链;④连接各功能链,合并重复的部分,即得产品功能结构。
1.2 功能-特性的表述
功能结构建立后,不能直接将功能转变为结构,而是要找到满足该功能的特性。特性取决于载荷、允许频率范围、允许挠度变形、占据空间、运动速度等设计约束,将功能转化为特性,创建了外部需求与内部特征的接口,可用少量的物理量表述。
1.2.1 特性的表述
特性主要分为:功能特性和传递特性,功能特性指实现该功能需要满足的效应,如力、速度等;传递特性包括能量流和信号流。
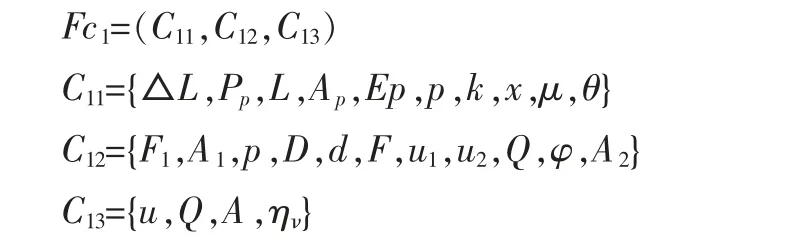
功能特性集合:Fc={Fci=(C1,C2,…)},i=1,2,…,N;
传递特性集合:Tcij={Etij,Stij},i,j=1,2,…,N;
能量流:Etij=(Type|Ee,He,Me,…);
信号流:Stij=(Type|F,D,U,I…)。
式中:Fci—产品需要满足的功能;Ci—不同功能所具有的特性,如张拉功能所具有的特性包括负载、流量、液压力、速度等。Etij和Stij分别表示能量流和信号流,能量流包括电能、液压能、机械能等;信号流包括力信号和变形信号等。
1.2.2 流的描述-有向图
有向图的定义:设V(D)={v1,v2,…,vp}是一个非空有限集合,A(D)={a1,a2,…,aq}是与V(D)不相交的有限集合。一个有向图D 是指一个有序三元组{V(D),A(D),ΨD},其中ΨD为关联函数,它使A(D)中的每一个元素(称为有向边或弧)对应于V(D)中一个有序元素(称为顶点或点)对。 若a 是一条弧,而和是使得ΨD(a)=(u,v)(≠(v,u))的顶点,则a 从u 指向v,并称u 为a 的起点,v 为a 的终点,简记为a=(u,v)。
功能有向图D 的关联矩阵B(D)=(bij)p×q定义为:

功能有向图D 的邻接矩阵M(D)=(aij)p×p的元素aij定义为从(功能)vi到(功能)vj的弧(传递关系)的条数。
如图2 所示的功能有向图,vi标记为第i 个分功,v1、v2、v3分别表示分功能1、分功能2、分功能3。 aij标记为从分功能i 到分功能j 的能量或信号传递。

图2 功能阶段有向图
功能特性

能量流:Etij=(a2,a3);
信号流:Stij=(a1,a4);。

1.3 结构特征的映射及表述
式中:σΤ—单位面积上的平均张力(kN/m2);B—预应力筋的横截面积;FT—作用在预应力筋横截面积B 上的张力(kN)。
结构特征可以表述为:

式中:C—几何参数,包括长、宽、高、体积等;m—材料参数,包括强度、刚度、硬度、塑性、密度等。
1.4 对偶图表述特性-特征的转化关系
对偶图的定义:设图D 的面的集合为F(D)={f1,f2,…,fr},则取G*的顶点集合为V(G*)={v1*,v2*,…,vr*}。 若D 中两个面fi与fj有公共边ak,则在G*中将两个顶点vi*和vj*连上一条边ak*; 若D 的边ak只在一个面fi的边界中出现,则在G*中,以顶点vi*为端点做一个环ak*。 于是得到G*中的边集合E(G*)={a1*,a2*,…,aq*},所得图G*称为图D的对偶图。
如图3 所示的有向图演变为对偶图, 表示功能特性转化为结构特征。 有向图中的节点为功能, 边为传递关系。演变为对偶图后,原图的特性消失,被特征取代;原图的传递特性消失, 被邻接特征 (两元件间的物理连接关系)取代;节点转化为面,抽象特性变为具有数量和体积的物理实体。
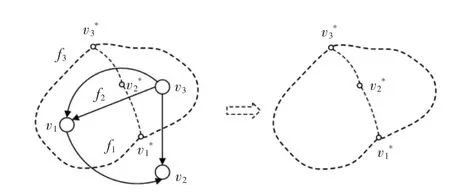
图3 有向图转化为对偶图
根据最近毗邻规则(①减少能量、信号传递通道的长度;②结构之间彼此靠近),结构发生迁移,形成新的布局。 布局图反映了结构之间的最优部局关系。
1.5 边点赋权图的优化决策
边点赋权图的定义:对图D 中的每一条边(vi,vj)相应地有一个数wij,wij为对应边(vi,vj)上的权,对D 中每一顶点vi相应地有一个数pi,pi为对应顶点上的权,即顶点和边均有权的图。
根据边点赋权图的定义可知, 功能权值集合可表述为顶点状态变量:V={vi,pi}; 传递特性权值集合可用边状态变量表示为:E={ai,wij}。
在特性阶段中,点、边的权值是未知的,但是需要的功能和需要传递的信号和能量的种类是已知的。 权值由设计者根据产品的需求和个人经验确定,其中功能权重之和为1,特性权重之和为10。 边点赋权图如图4 所示。
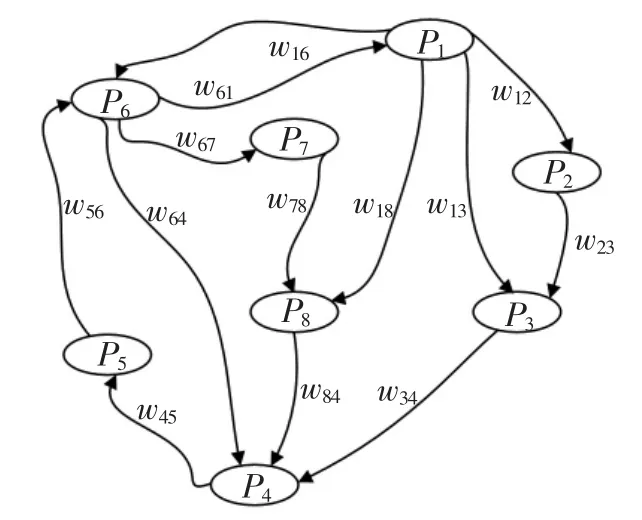
图4 边点赋权图图
2 实例
预应力技术以其所特有的优点迅速发展,并广泛地应用于桥梁、 高速公路、铁路等领域。 预应力张拉机[12-13]作为预应力张拉的关键设备,其主要功能是为钢筋笼施加精确的预应力,提供管桩抗裂性能。 通过分析客户需求得到张拉机主要技术需求如下:①基本尺寸为1100mm×600mm×900mm;②最大张拉力为3000KN;③一次张拉时间为120s;预应力筋伸长量误差小于1mm。
2.1 张拉机的功能结构
按照1.1 所描述的功能结构建立步骤, 可以得到张拉机的功能模型如图5 所示。 总功能的输入能量、物质、信号分别为电能和液压能、预应力筋、感应信号;其输出能量、物质、信号分别为变形能、变形的预应力筋、力信号和变形量。

图5 自动张拉机功能结构
2.2 张拉机功能-特性的转化
如图6 所示为一个张拉周期内的管桩自动张拉机功能 有 向 图,F1、F2、F3分 别 表示张拉预应力筋、测量张拉力与引伸量、 锚固预应力筋;e1、e2、e3表 示 张 拉、测量、 锚固所需输入的能量,s12表示力信号和位移信号。由张拉机的功能有向图可以得到功能关联矩阵B(D)与邻接矩阵M(D)。

图6 张拉机功能有向图

2.3 张拉机特性-特征的转化
张拉机在张拉预应力筋时, 张拉装置做往复直线运动且主要承受轴向负载,可根据预应力筋理论伸长量和平均张拉力[14]确定其负载F 和速度ν。 由于张拉预应力筋所需负载大、速度慢等特点,选择活塞机构作为张拉装置。
在张拉预应力筋时液压力主要作用在活塞杆侧环形面积上且液压缸的液压力必须大于或等于前面所分析的负载力,液压力的计算如下:

式中:F1—作用在活塞杆侧环形面积上的液压力 (拉力)(N);p—进油腔压力(Pa);A1—有杆腔面积(活塞杆侧环形面积)(m2);D—液压缸内径 (活塞外径)(m);d—活塞杆直径(m);F—被拉动的负载阻力(N)。
锚固装置通过电机带动, 从而拧紧管桩张拉头板上的螺母,其特征可以通过扭矩来确定;连接元件与张拉头板一般采用螺纹连接或夹紧连接, 其特性可以根据螺母连接强度和夹紧力来确定。 通过以上分析可以得到张拉机的特性及特征如下:
张拉特性及特征:
锚固特性及特征:Fc2={C21={T,Tw,η1,ηm,i}}
连接特性及特征:Cp1={σ,K,F,d1,D,K1,d0,τ,σn}
2.4 张拉机结构方案的优化决策
根据张拉机功能特性到结构特征的映射, 可以获取满足对应功能的结构实体,如表1 所示。通过边点赋权图计算满足要求的物理实体的评价得分,如表2 所示。从表2 可以看出连接螺母和锚固螺母的得分要高与夹紧卡爪与锚固皮带的得分。 选择得分最高的物理实体通过布局图组成整体结构方案,如图7 所示。
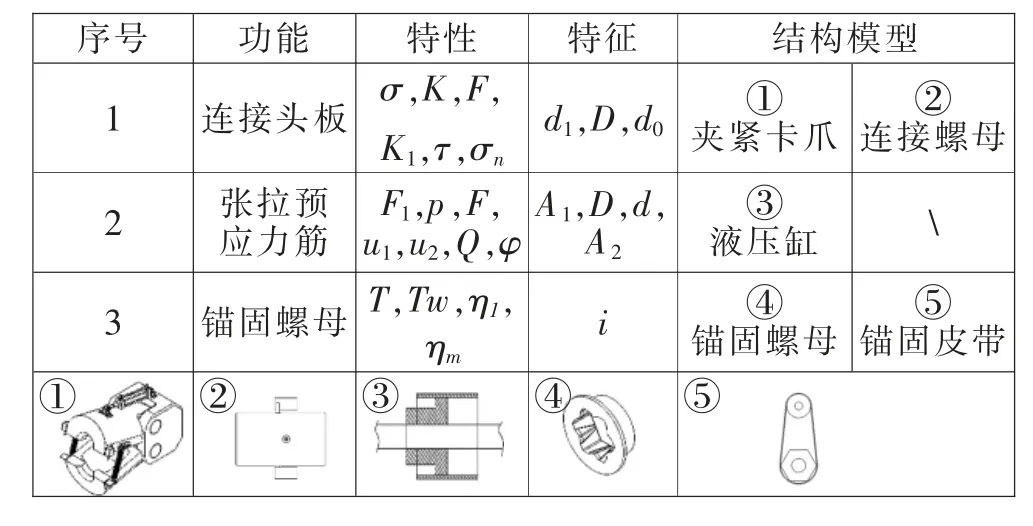
表1 满足功能特性及结构特征的物理实体

表2 物理实体评价得分
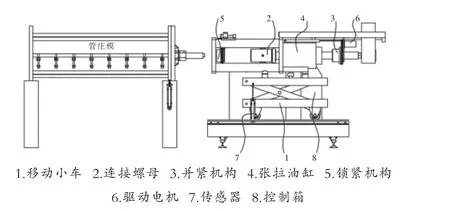
图7 张拉机整体结构图
3 结论
本文提出的基于有向图与对偶图的功能-特性-特征的概念设计过程模型,更为精确地解释了功能域-物理域的映射过程。 首先基于功能基的方法建立了张拉机的功能结构, 并通过有向图描述了能量流和信息流在功能之间的流动关系; 然后通过对偶图实现特性-特征的转化;最后通过边点赋权图对不同方案进行优选。 根据本文的概念设计过程模型, 可以求解出满足功能特性与结构特征的设计方案,为概念设计方法提供了新的思路。
