绝缘子串激光除冰机器人人机交互控制系统设计
2021-08-21邹德华邝江华刘兰兰
牛 捷,邹德华,邝江华,刘兰兰,江 维
(1. 智能带电作业技术及装备(机器人)湖南省重点实验室(国网湖南省电力有限公司输电检修分公司),湖南 衡阳 420100;2. 带电巡检与智能作业技术国家电网公司实验室(国网湖南省电力有限公司输电检修分公司),湖南 衡阳 420100; 3. 武汉纺织大学 机械工程与自动化学院,湖北 武汉 430200)
0 引言
绝缘子是高压输电线路上的重要金具,绝缘子串[1-4]是由一串绝缘子首尾相连而成悬挂于输电杆塔和输电导线之间,用于保证杆塔与导线之间的绝缘与支撑杆塔的作用,冬季气候严寒,位于高空野外环境下的绝缘子串经常覆冰严重,这种覆冰不仅增加了杆塔的负重,还会导致绝缘子串绝缘性能的丧失,特别是绝缘子串上片间绝缘子之间形成的冰凌[5-6]会导致绝缘子短路事故的发生,这些都严重威胁冬季输电线路的安全稳定运行,因此,输电线路绝缘子除冰作业是电力工人的一项常规作业任务。目前国内外最常用的除冰方法有热融冰[7-8]、机械破冰[9-10]、热融冰需要断电作业,这样会造成停电巨大的经济损失,机械除冰过程中脱落的冰块对操作人员的人身安全有极大的威胁,同时,机械除冰过程中产生的振动对输电线路结构可能会造成一定的潜在影响,此外,这些除冰方法大多都有作业效率低、安全隐患大的一些显著缺陷,而激光[11-12]作为一种清洁能源,不仅能够实现非接触式的除冰而且控制灵活,特别适合于野外复杂环境下的输电线路绝缘子除冰作业,而与此同时,激光器的搭载装备是实现激光器近距离除冰,有效利用能量的关键,传统的基于机载平台[13]的搭载方式在激光能量损耗上较大。
基于上述分析,本文提出了一种利用无人机搭载激光器实现输电线路绝缘子串的除冰新方法,通过无人机和激光器的协同控制实现绝缘子串激光近距离除冰。针对无人机系统和激光器系统物理上的独立而造成的控制分散性问题,本文在激光除冰系统实现方案的基础上,深度整合了无人机控制和激光器的控制,提出了无人机和激光器深度融合集成方案,基于MFC平台设计并开发了激光除冰系统的集成式人机交互平台,开发了应用软件,实现了无人机-激光器系统的集成化控制,该人机交互界面友好,操作方便,相比传统PC端的分散式控制其具有集成式控制特点,特别适合于复杂野外环境下的输电线路绝缘子串激光除冰作业,绝缘子串激光除冰是激光技术与电力系统深度融合的新尝试和新探索,其研究和实施对于输电线路安全、稳定、智能运维管理,特别是对于推进输电线路除冰作业方法的实用化进程具有重要意义。
1 绝缘子串激光除冰系统的基本构成与作业过程
1.1 激光器的基本结构
输电线路绝缘子激光除冰装备的核心是激光器,其包括机械部分和电气部分两大部分。其机械部分包括旋转和俯仰两个关节对激光头方位和位姿进行调整,其位于激光除冰装备的前端底部,使得机器人激光头可在一定旋转角度和俯仰角度内调整位于激光装备前端的位置,激光除冰装备电气部分主要包括电源、电池、控制器、电压转换模块、无线通讯模块、扩束镜头等。其中核心激光部件主要包括激光头、频率转换装置、准直镜、扫描振镜、聚焦镜等,瞄准装置可通过电子望远镜将图像信息传送给控制系统,并在显示屏上显示,绝缘子激光除冰装置的基本结构如图1所示。
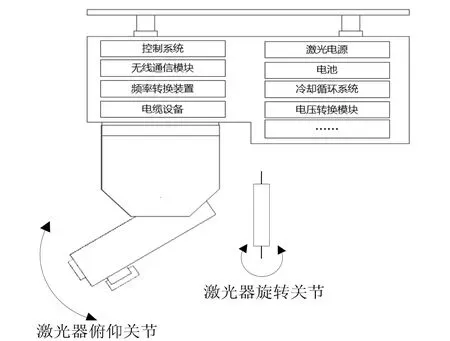
图1 激光除冰装置的基本结构
1.2 无人机与激光器的复合
激光的能量随着距离增减逐渐衰减,激光近距离的除冰作业是完成除冰任务的关键,因此,本文提出了无人机搭载激光器的方法,本文所设计的无人机搭载激光除冰装置的无人机身,具备一定承载能力,前端与后端具备四个对称的旋翼,且每个旋翼都由一个无人刷直流电机控制,无人机身具备电源进行供电。无人机身底端布置有螺纹孔,用于与联接件连接,无人机身二维示意图如图2(a)所示。基于无人机搭载的超高压绝缘子激光除冰装置主要包括:四旋翼无人机身、联接件,其布置在无人机身下端,与无人机身布置的螺栓孔紧固连联接;激光装备,其布置在联接件下端,与联接件螺栓紧固连接,用于发射激光清理覆冰。无人机平台复合后的激光除冰系统三维模型图如图2(b)所示。
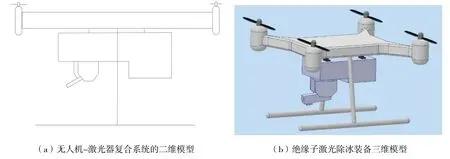
图2 基于无人机的激光除冰系统的总体实现
1.3 绝缘子激光除冰作业运动规划
合理的除冰作业运动规划是完成绝缘子除冰作业的关键。首先,无人机平台搭载激光除冰装备飞行至合适位置并通过激光头的俯仰机构调节对绝缘子串一侧进行扫描除冰,当一侧绝缘子串覆冰清除完成后,飞行至另一侧进行除冰作业。通过无人机和激光除冰装备的协同作业运动控制,并重复上述过程实现整串绝缘子覆冰的激光除冰作业,如图3示为完整的激光除冰装备除冰作业过程和二维作业运动规划。

图3 激光绝缘子除冰机器人作业运动规划
2 绝缘子串激光除冰机器人人机交互系统控制架构
激光除冰机器人人机交互系统架构如图4所示,人机交互控制系统包括运动交互控制系统和作业后台管理系统,均可基于Win10操作系统设计,可统一采用C++语言、基于面向对象的开发方法,通过Socket网络通信。运动交互控制平台通信层与指令协议同机器人本体一致,负责所有控制指令的收发以及图片、视频信息的传输。运动控制系统主要由机器人状态查询显示、运动控制、除冰作业任务部署及摄像头远程监控单元组成。其中,激光除冰机器人还拥有一套数据库系统,可用来存储机器人除冰作业数据,包括机器人自主除冰作业所需的线路信息数据、除冰作业日志数据以及除冰结果数据等。除冰作业后台管理系统负责管理维护除冰作业数据,包含线路绝缘子除冰信息的录入与修改、除冰效果的导入与分类、故障分析与诊断、出具除冰作业报告等功能。机器人人机交互控制的主要功能是远程对激光除冰装备发送控制命令,除冰装备在获得接收到指令后进行相应除冰动作,同时将除冰作业过程中的关键状态通过无线的方式传输给上层软件,通过网络解析,将现场作业状态显示到控制界面上,从而实现系统控制命令和运行状态的双向传输控制。
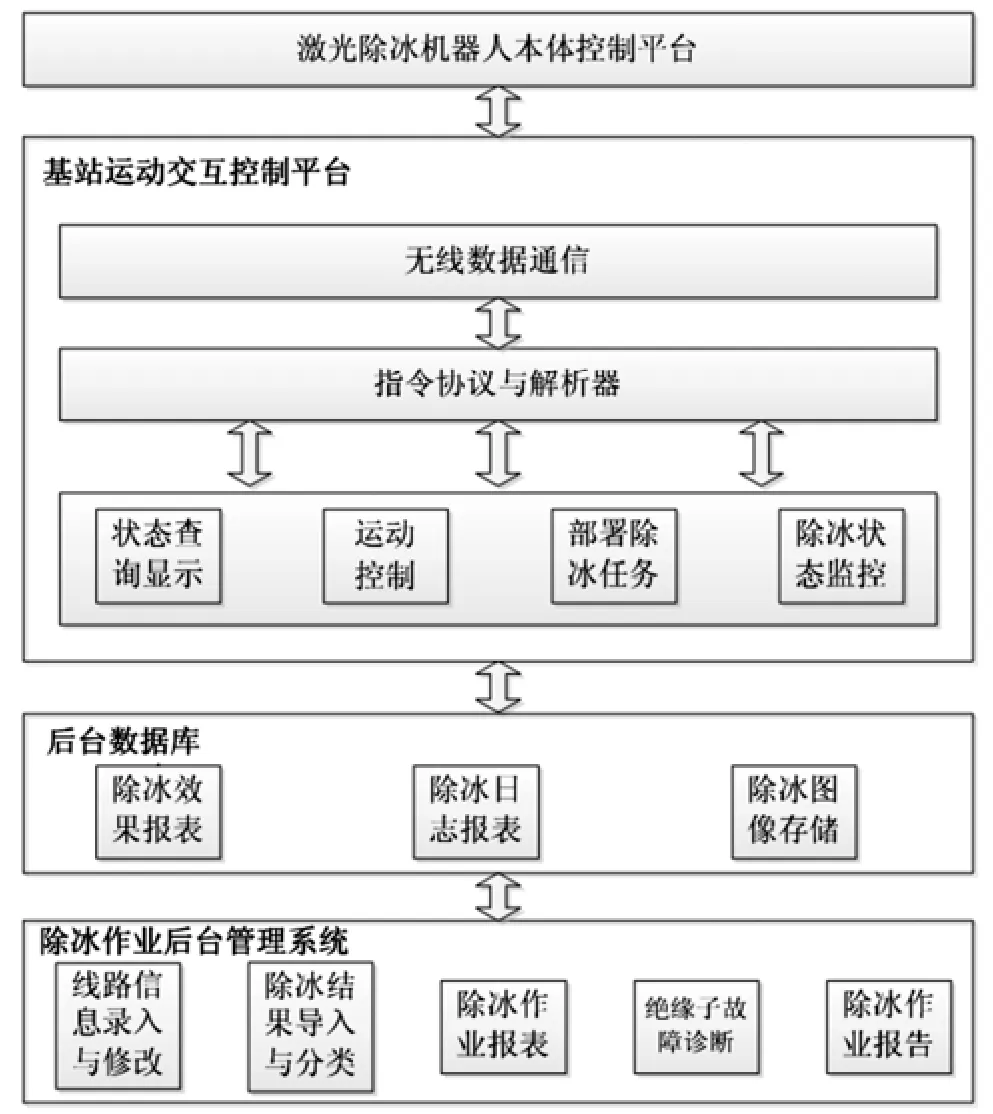
图4 绝缘子激光除冰机器人人机交互系统架构
3 绝缘子串激光除冰机器人的协同人机交互控制系统设计
输电线路绝缘子串激光除冰机器人主要包括两大部分,四旋翼无人机系统和激光器系统,四旋翼无人机主要负责搭载激光器系统去接近输电线路上的绝缘子冰凌,其飞行控制主要包括无人机“上升”、“下降”、“左飞”、“右飞”等基本运动,此外,对于无人机为实现既定目标的精准定位与自主捕捉导航还具有一键自主导航功能,同时,无人机在飞行过程中需要将线路环境的视频图像信息通过无线的方式传递到控制终端,因此,无人机还具有开启录像的功能,最后无人机的续航能力与其电力消耗息息相关,因此,在关键状态中需要设置无人机电能监控窗口。激光器系统的控制又可以分为激光器系统的参数设置控制和激光器系统的运动控制两大部分,其中,激光器系统的参数控制,主要是调节激光的参数,这些参数与激光的性能息息相关,同时也影响激光除冰效果,最典型的性能包括,激光功率设置、激光扫射速度设置、激光扫射频率设置、激光扫射形态设置,同时还具有开光延时、关光延时、结束延时等辅助控制功能,待激光参数设置完成后可以开启“激光”,替换“红光”,“激光”是带有能量的光,而“红光”只是指示光。激光器系统的运动控制主要包括俯仰和旋转两个自由度的运动控制,两个关节都可以实现位置环和速度环的控制,其基本功能包括加速、减速、停止等功能。除激光器和无人机的控制外,还有一些系统的关键状态如系统网络连接、无人机电源、激光器电源、视频图像传输状态等关键信息都需要实时监测与控制,基于上述分析,可以设计如图5所示的无人机-激光器复合的除冰机器人人机交互控制系统,该控制平台可以实现无人机、激光器的集成化控制。

图5 激光除冰机器人控制界面设计
4 结论与展望
本文针对输电线路无人机-激光器绝缘子激光除冰系统软件控制平台的分散性问题,提出了一种集成化的人机交互控制实现方案,将无人机控制和激光器的控制集成在同一人机交互控制界面上,基于MFC设计了人机交互控制界面并开发了相应控制软件,其界面友好、操控方便,特别适用于野外环境下激光除冰作业集成化控制,实现了激光技术在电力系统中的创新应用,同时本文所提出的激光除冰系统和除冰新方法还需要在进一步的实验中来探索激光器和无人机运动的最优控制参数,进一步实现激光除冰系统的自动化和智能化作业以提高其电力系统应用的工程实用性。
