基于动力学仿真的齿轨车辆限界研究
2021-08-20温炎丰黄运华
赵 轩,温炎丰,吴 晓,王 建,杨 阳,黄运华
(1.西南交通大学 机械工程学院,四川 成都 610031;2.中国中铁二院工程集团有限公司,四川 成都 610031)
0 引言
齿轨交通在国外已有很长应用历史,但在国内仍属新鲜事物。相比于普通铁路,齿轨铁路在特定线路的轨枕上安装有一条齿轨。同时,齿轨车辆转向架上配备了一个或多个与齿轨相啮合的齿轮,在坡度较大的山地环境行驶时,通过齿轮与齿轨啮合以驱动车辆行驶,使车辆克服轮轨黏着驱动时黏着力不足的问题。齿轨铁路具有车辆爬坡能力较强、运载能力良好以及对环境破坏小等优点,适合作为山地观光线路[1,2]。
为了保障轨道车辆在线路上的安全行驶,限界成为了轨道车辆及线路系统设计的重要一环。车辆限界是指机车车辆横断面不允许超越的最大轮廓尺寸,车辆在空车或重车状态,均不得超过车辆限界。此外,车辆限界反映了车辆动态偏移后的轨迹,包含了正常运行下的各种限定因素,对于沿线设备线缆等布置有着重要的影响[3]。作为新制式轨道交通车辆的齿轨车辆,国内尚未有齿轨车辆相关的限界标准,故有必要对齿轨车辆限界进行分析计算。
限界计算方法有动力学计算法和公式计算法。罗仁等[4]指出相对于用公式计算限界的方法,动力学仿真方法不需要人为确定悬挂偏移量,且能考虑车速、风载、线路条件、车辆参数﹑轮轨磨耗状态等因素的影响。王爱彬等[5,6]指出理论公式计算出的限界结果要比动力学方法结果偏大,偏于保守,动力学限界计算方式与实际更接近。张力波[7]、吴晓等[8]采用了动力学方法对新型轨道交通的限界进行了计算分析。基于以上研究,本文针对一种齿轨车辆,参考CJJ96—2003《地铁限界标准》[9]的计算原则,基于动力学仿真对齿轨车辆的车辆限界、直线设备限界、曲线设备限界进行计算。
1 动力学计算模型
根据齿轨车辆的结构特点,在SIMPACK动力学仿真分析软件中建立单节车辆动力学模型。建模时,建立最大磨耗状态下的轮轨模型,将侧风载荷和偏心载荷考虑为集中力的形式,其中侧风作用点为车体侧墙的形心,风载荷考虑400 N/m2,偏载作用点为距车体重心横向100 mm处。轨道的不平顺因素采用激励模拟,齿轨车运行于普通线路上,激励选用美国五级谱。
在忽略各部件本身弹性变形的条件下,齿轨车辆可作为离散的多自由度系统来处理。车辆包含的每个刚体均有6个自由度,其中包括伸缩、横移、沉浮、侧滚、点头、摇头。整车系统包括1个车体、2个构架以及4组轮对并均将其视为刚体,共计7个刚体、42个自由度。车辆结构拓扑图如图1所示。

图1 车辆结构拓扑图
该单节齿轨车辆动力学模型包括车体与两个转向架以及其他连接结构。根据车辆和转向架的具体结构形式以及建模需求,对于一系钢弹簧、一系垂向阻尼、牵引拉杆、二系横向阻尼、空气弹簧、横向止挡、一系弹簧止挡、空气弹簧气囊下的紧急弹簧或橡胶、抗侧滚扭杆等弹性元件,在SIMPACK建模软件中使用力元模拟。建立的齿轨车辆动力学模型如图2所示。
图2 齿轨车辆动力学模型
2 限界动力学仿真分析方法及计算工况
2.1 齿轨车辆限界动力学仿真分析方法
仿真车辆限界前首先需根据车辆结构来确定车辆横断面上的控制点,控制点的选取应充分考虑车体等部件上的最大偏移位置,连线控制点作为计算车辆轮廓线。根据得到的车辆轮廓控制点坐标,绘制出齿轨车辆的轮廓线。根据获得的车辆轮廓线各个控制点的坐标值,在单节齿轨车辆模型中设置marker点,这些marker点按照控制点所属的部位建立在车辆对应的部位上。仿真模型的坐标系中也根据所有控制点的坐标值建立关于所有控制点的marker点,利用sensor(传感器)的功能,在SIMPACK后处理文件中直接获取控制点在仿真过程中的垂向和横向偏移量,将获得的垂向、横向偏移量与车辆轮廓线叠加后,便得到其车辆限界。其中直线设备限界由车辆动态偏移量叠加故障工况额外偏移量得到;曲线设备限界由车辆动态偏移量叠加故障和曲线几何导致的额外偏移量得到。
2.2 齿轨车辆限界动力学仿真分析工况
参考国外现有齿轨车辆参数[10]以及四川省地方标准DB51/T2542—2018《山地(齿轨)轨道交通技术规范》[11],齿轨车辆在齿轨段运行时最高速度不超过40 km/h,普通线路段运营最高速度为120 km/h。图3为齿轨车辆轮廓线图,图4为直线工况齿轨车辆20 km/h~120 km/h速度下的部分车肩控制点横移量。分析图4可知,车辆在高运营车速下车体控制点位移量相对更大。齿轨车辆的车辆限界应同时满足普通路段和齿轨线路的要求,因此,在普通路段对齿轨车辆的限界进行仿真,模型仿真速度设置为车辆的最高运营速度120 km/h。由于仿真速度高于40 km/h,本文不考虑齿轮与轨道啮合对齿轨车辆限界的影响,只需考虑齿轮在车辆运行过程中的横移量。曲线线路参数和速度设置如表1所示。

表1 曲线线路参数和速度设置
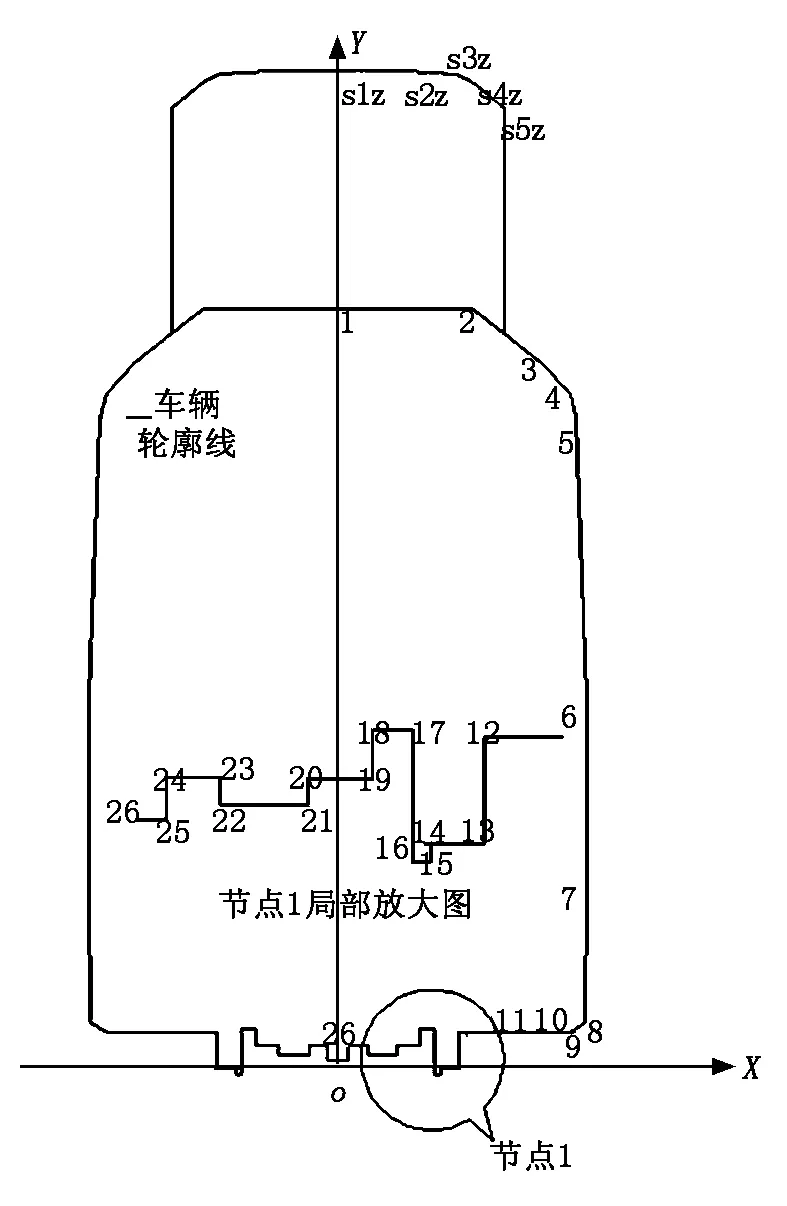
图3 齿轨车辆轮廓线
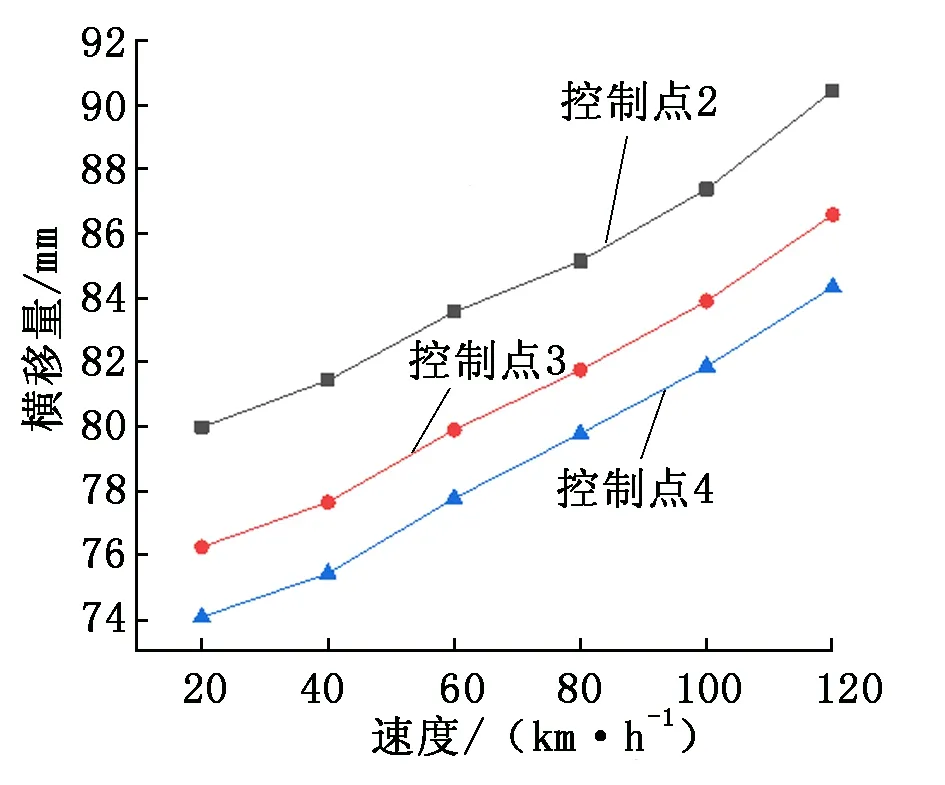
图4 齿轨车辆不同速度下的部分控制点横移量
3 计算结果分析
3.1 齿轨车辆的车辆限界

通过动力学仿真,模拟齿轨车辆在平直轨道上的运行,计算并记录其控制点的横向、垂向位移量,其中受电弓控制点以及车体上1号~6号控制点记录垂向上偏移量,其余控制点记录向下偏移量,转向架上16、17、22、23号控制点记录向左偏移量,其余控制点记录向右偏移量。经仿真结果分析,发现第2种工况组合下偏移量较大,因此以第2种工况下的动力学仿真结果作为车辆限界。动力学仿真得到的齿轨车辆轮廓线与车辆限界如图5所示。其中,1~7为车体控制点,8~26为转向架控制点,13、14为踏面控制点,15、16为轮缘控制点,s1z~s5z为受电弓控制点,下同。
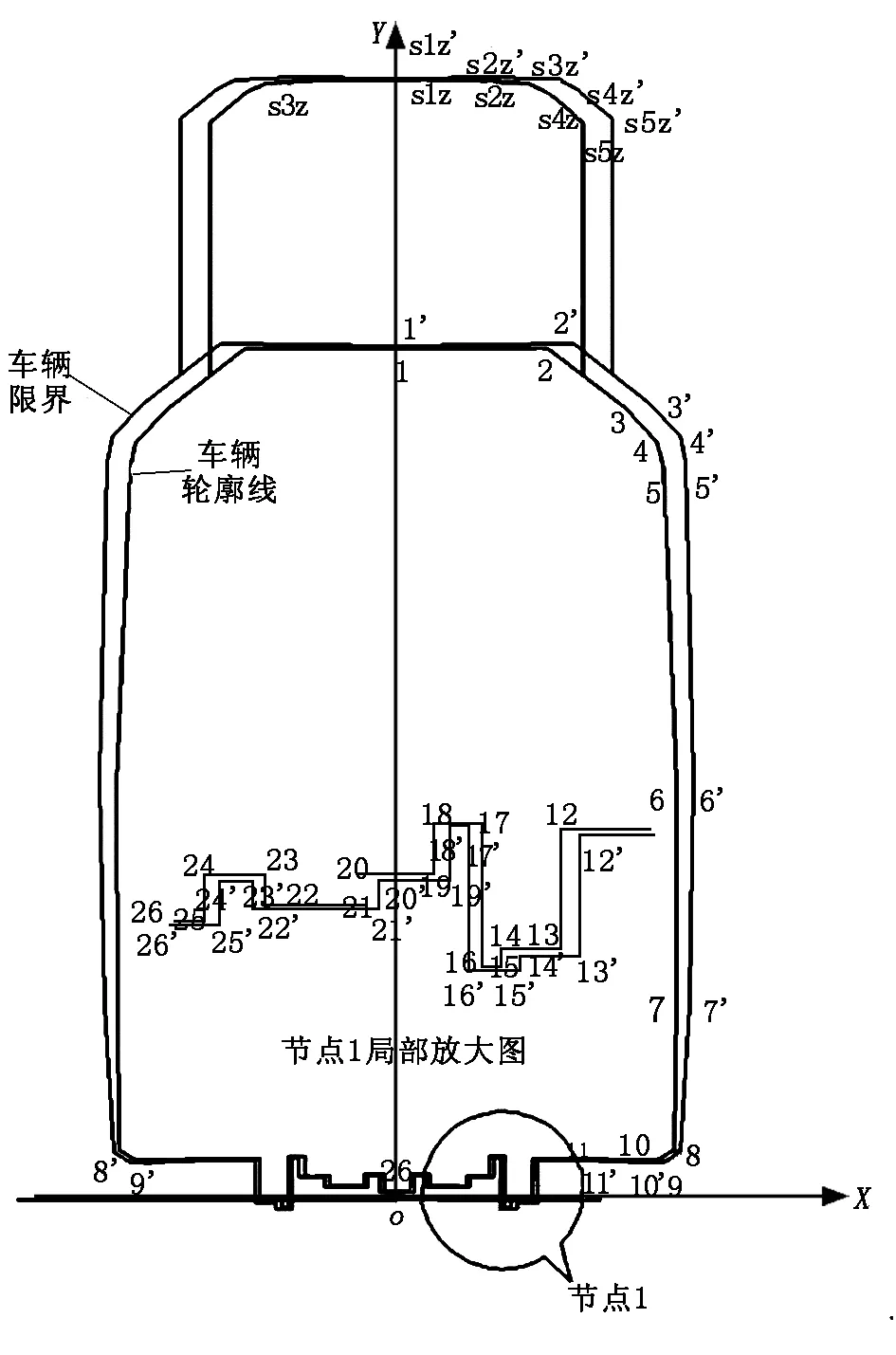
图5 齿轨车辆轮廓线与车辆限界
3.2 齿轨车辆的直线设备限界
模型中空气弹簧和一系钢弹簧设有两个刚度,一个是自身刚度,另一个是垂向止挡刚度,垂向止挡力特性如图6所示。针对空气弹簧和一系钢弹簧失效工况,将空气弹簧和一系钢弹簧刚度设置为0 N/m,空气弹簧膨胀工况则考虑为某个由于故障而膨胀的空气弹簧膨胀到最大限度且其刚度极大。
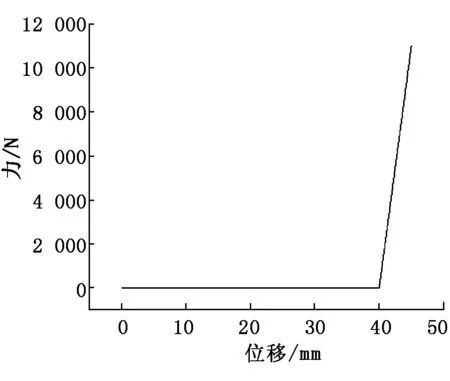
图6 空气弹簧垂向止挡特性曲线
齿轨车辆的直线设备限界由车辆动态偏移量叠加故障工况额外偏移量得到。受电弓控制点以及车体上1号~6号控制点取空气弹簧过充气导致的向上偏移量,车体上7号控制点取空气弹簧失气工况导致的向下偏移量,车体1~7控制点均取空气弹簧膨胀和失气情况下的最大横向偏移量,从而构成齿轨车辆的直线设备限界,如图7所示。
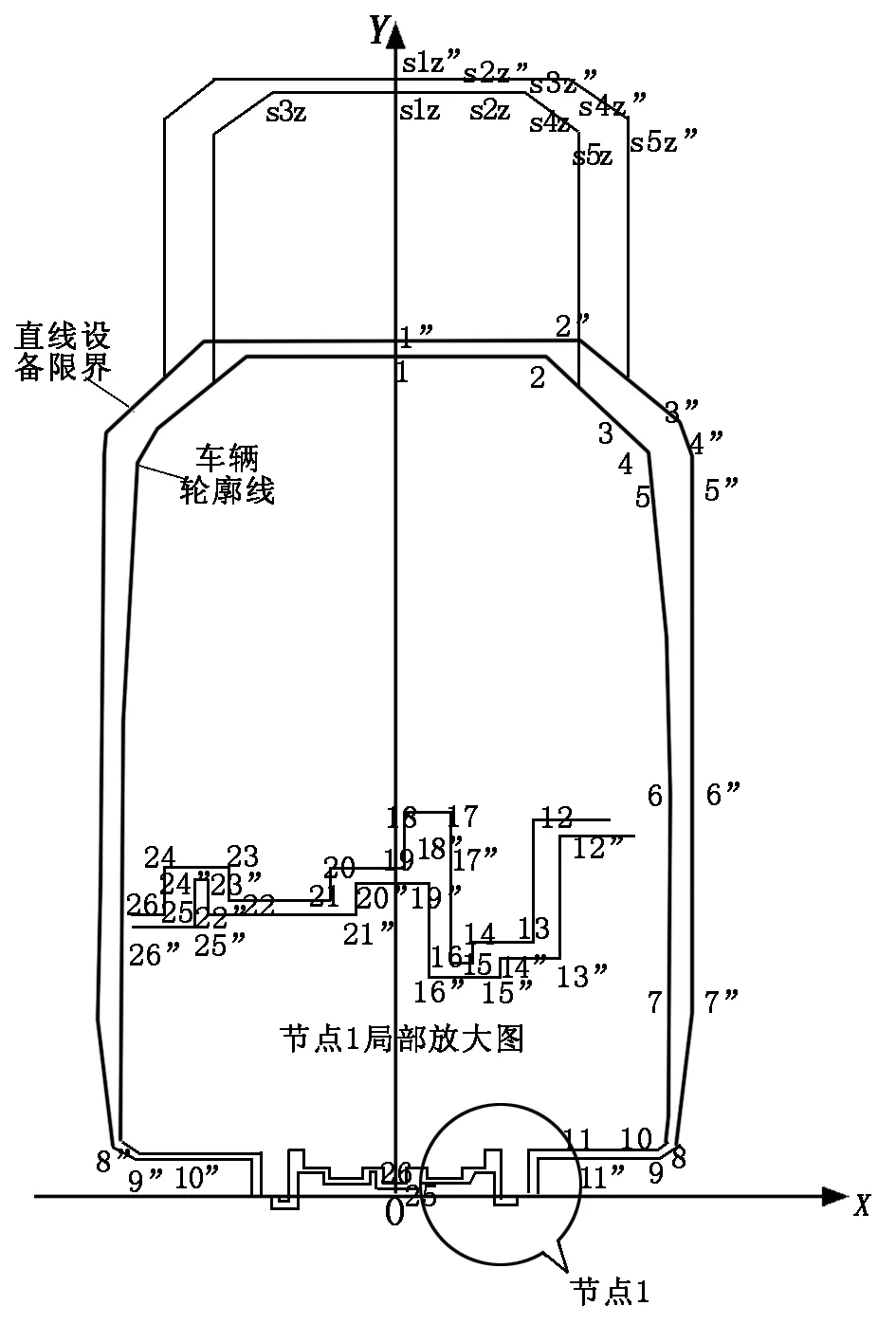
图7 齿轨车辆轮廓线与车辆直线设备限界
3.3 齿轨车辆的曲线设备限界
曲线设备限界是在直线设备限界的基础上,综合车辆在曲线通过时由于曲线几何偏移、过超高或欠超高以及轨道或车辆参数变化引起的额外偏移量,从而得到的曲线地段下的设备限界。故障导致的车体垂向和横向位移取值与3.2中的直线设备限界相同,此处不再赘述。齿轨车辆的曲线设备限界由车辆动态偏移量叠加故障和曲线造成的额外偏移量得到。齿轨车辆曲线设备限界考虑车辆以时速60 km/h通过半径为200 m曲线时的曲线段设备限界,如图8所示。
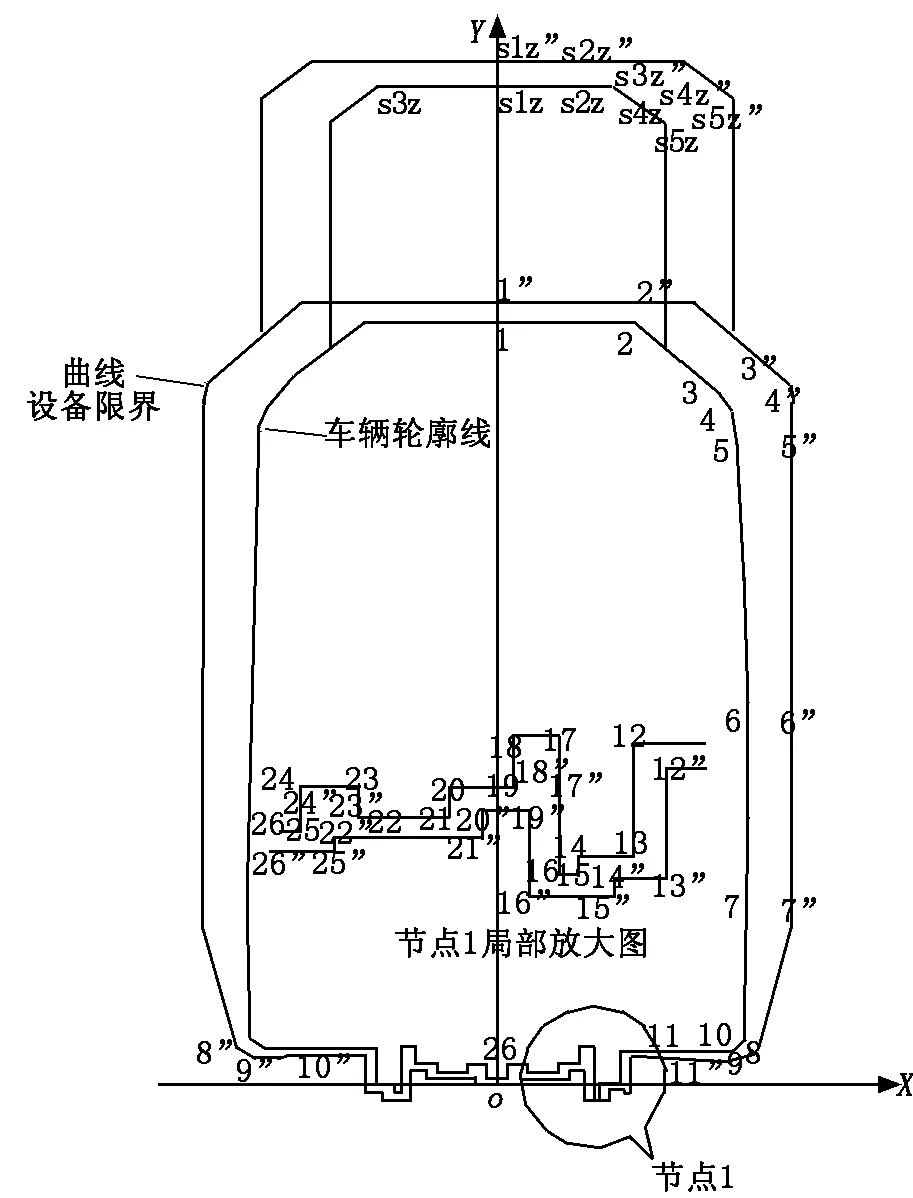
图8 齿轨车辆轮廓线与车辆曲线设备限界
4 结论
目前我国尚未有齿轨车辆相关的限界标准,因此本文针对某型齿轨车辆建立了其动力学仿真模型,在动力学仿真的基础上获得了齿轨车辆的车辆限界和设备限界轮廓图,可为齿轨交通的工程设计提供一定的参考。由于动力学仿真计算限界尚难以模拟各个结构的制造和安装误差且仿真难以模拟真实环境,因此在工程设计中还需考虑车辆的制造误差和影响车辆运行的多种外界因素,以获得更加准确的限界。
