立体图像任意剖面轮廓线提取方法仿真研究
2022-09-28冯丽露康耀龙
冯丽露,康耀龙
(1. 山西大同大学,山西 大同 037009;2. 山西大同大学计算机与网络工程学院,山西 大同 037009)
1 引言
在医学放射治疗诊断中[1],能够精准地获取图像轮廓线是对放射剂量分布进行观测的重要所在。轮廓线[2]的精准提取对放射治疗有着重要的应用价值。轮廓线提取不仅在医学方面起到重要作用,在矿山等领域也占据着关键地位,它是矿山采空区能够实现可视化的前提。由此可见,轮廓线提取在多领域中应用广泛,为了提升轮廓线提取的精准度,需要对立体图像任意剖面轮廓线提取问题进行研究。
袁雷[3]等人提出基于深度学习的跑道前视红外图像轮廓线提取方法,该方法首先利用YOLO V2检测算法对目标进行提取,根据跑道位置,采用多尺度线段检测器对跑道边框进行线段检测,并将所有检测线段相互融合,从中提取轮廓线,该方法提取的结果存有误差,存在提取耗时长的问题。曹旭[4]等人提出高精度连续人脸轮廓提取方法,该方法首先对图像关键点进行连接,连接成一条初始化曲线,根据它的采样重叠区域,将整个轮廓划分成多个小区域,同时在区域内提取轮廓线,该方法连接效果不完善,存在提取完整度低的问题。闻平[5]等人提出利用原始激光雷达点云数据提取渐进式建筑物轮廓线方法,该方法利用渐进数学形态学对原始点云进行滤波分离,并对建筑物中的点云进行分类,以此对轮廓线进行提取,根据方位角阈值对点云轮廓的关键点进行确立,并对轮廓线进行简化和拟合,最终基于轮廓线长度加权方向对轮廓进行规则化,实现最终轮廓线提取。该方法分类效果不明显,存在与实际轮廓线匹配误差多的问题。
为了解决上述方法中存在的问题,提出基于光切法的立体图像任意剖面轮廓线提取方法。
2 光切法
光切法[6]属于三维曲面非接触测量方法,一般来说,被测物体经光照后会出现一条光带,经过摄像机和处理器对图像进行获取后,对其进行处理,就会得到物体的三维轮廓信息,而光切法就是轮廓提取的关键。
2.1 基于光切法的立体图像预处理
要想对立体图像任意剖面轮廓线进行提取,应优先对光带进行处理,由于CCD摄像机得到的图像是整张的,若只对光带进行处理,那么就需要预处理图像数据。
对获取的图像进行分割操作,将其划分成光带和背景,利用阈值对其分割,同时计算出阈值T。将图像内大于T的像素保存下来,而剩余像素均设置为0。对于阈值T的计算,采用p-tile参数算法进行获取,此时需要处理的光带如图1所示。
图1 待处理的光带
在图1中,光带只是高灰度级的其中一小部分。一般情况下寄存器有256种颜色,当灰度级≥5时,255处就会出现一条孤立峰。当光带在图像中占据的位置较少并且具有平衡性时,就可以对T值进行确立。光带在分割后经常会出现一些噪声,为了提升轮廓线提取效果,需要对光带的噪声进行去噪处理。
2.2 处理轮廓线
基于上述预处理后的图像及分割完成的光带,需要对轮廓线进行处理。
1)原始立体图像任意剖面轮廓线插值和排序
为了可以确立光带中任何位置和方向上的轮廓线,优先需要对原始剖面轮廓线进行插值[7],其中包括层内点插值和轮廓线层内插值。
根据上述轮廓线插值,采用线性插值方法对其进行处理。将图像中需要插值的层内间距设置为1mm,这样才会提升轮廓线提取的精准度,但算法的速度也会逐渐下降。因此需要对插值后的轮廓线的高低进行排序,当插值排序后的轮廓线集合具有足够数量的点数和层数时,就可以对其进行剖切处理。
2)原始断层轮廓线旋转
如果直接对剖面的轮廓线进行剖切,就需要对平面和直线相交处进行计算。为了达到降低平面与直线相交的目的,提升算法速度,应该对立体图像进行旋转处理[8]。
在笛卡尔坐标系下,空间中任一平面的平面法向量由X轴正向夹角α、Y轴正向夹角β、Z轴的截距Zcut来确定。这时平面法向量与Z轴的正向夹角表示为
(1)
式中,γ描述的是夹角。
此时的平面方程定义为

(2)
这时,断层轮廓线提取的任意方向标记为(α,β),而任意位置Zcut剖面轮廓线就可以转化成α、β和Zcut确定的同一空间平面L和立体图像A相交的问题。
对相交问题进行求解前,首先需要将立体图像A按照α、β的角度进行旋转,这时平面L也会一起旋转,令平面L与XOY平面相互平行。具体的操作方式就是将立体图像中各个层的轮廓线和平面L以Z轴为准进行旋转,得到夹角δ,接着以X轴旋转,得到图像上一点旋转前后的关系,定义如下

(3)
式中,(x,y,z)描述的是旋转前的坐标,(x1,y1,z1)描述的是旋转后的坐标,即cosδ=cosβ/sinγ(0≤δ<360)。
设置平面L与Z轴旋转后的新截距用Z1进行表示,这时Z=Z1就是平面L的新方程,即Z1=Zcut*cosγ。
根据上述分析可知,剖面轮廓线就是平面Z=Z1与旋转后的立体图像A之间的交线,将其构建成三维形体。
3 立体图像任意剖面轮廓线提取
基于上述对剖面轮廓线的插值、排序、旋转等处理,构建了三维形体,采用凸包压入法对剖面轮廓线进行提取。
3.1 凸包压入法
为了能够精准地对轮廓线进行提取,应优先将包络在轮廓线外部的交点引入到轮廓线中,以此解决剖面线出现交点复杂的问题,具体步骤如下所示:
1)首先对点集B={b1,b2,…,bi,…,bn}中的n个数据横坐标的最小点进行标记,记作b1;以此用作轮廓线的第1个点。
2)将其余(n-1)个点与b1连线水平方向夹角余弦值[9]进行计算,从中获取余弦值最小点,以此用作轮廓线的第2个点。
3)在点集B中其余(n-2)个点内,任意一点bi对三角形b1b2bi进行构建,从中找到最大点bj,以此用作轮廓线的第3个点b3。
4)将b2对b1进行替代,而b3对b2进行替代,那么(n-3)个点中,将步骤(3)重复进行,以此获取轮廓线下一个点。
5)b3与b1重合后,就可以暂停对数据的搜索,以此形成精准的边缘轮廓线。
依据上述操作,加入剖面轮廓线交点后,会存在两种不确定性:
1)所有交点都是随机分布的,具有不确定性;
2)加入到剖面轮廓线[10]后,剖面形态就会出现不确定性。
综上所述,对交点和轮廓线的位置进行确立,将交点加入到轮廓线中,以此实现剖面轮廓线的提取。
3.2 基于凸包压入法的剖面轮廓线提取
凸包压入法原理:在边缘轮廓线L1四周的交点应引入到剖面线内,对b1、b2、L1周边的点进行连线。当L1的周围出现交点时,b1b2和交点之间的连线就是钝角;当b1b2与凸包线L2、L3的测点(c4,c5,c6,c7)进行连线时就会产生锐角,通过各个夹角的大小就可以确立交点的添加位置。轮廓线提取的示意图如图2所示。
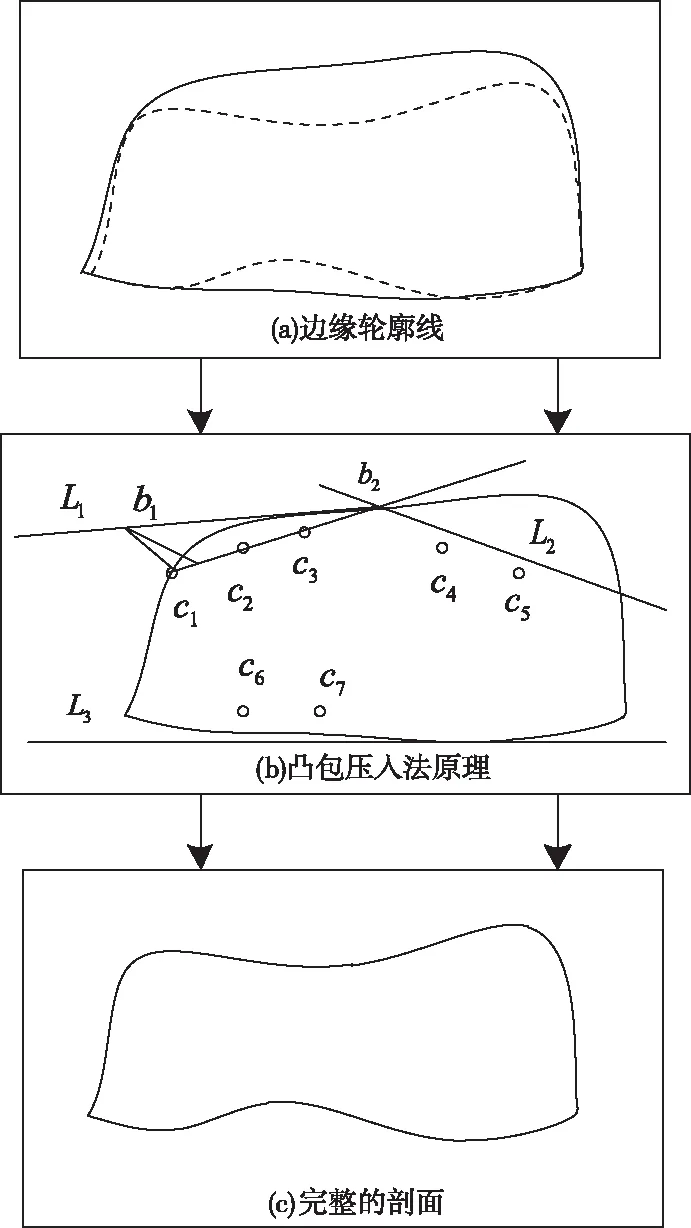
图2 轮廓线提取示意图
具体步骤如下所示:
1)首先找到与b1b2之间夹角最大的点,这时3点夹角的判断公式定义如下:

(4)
式中,θ代表b1、c1、b2的夹角。当余弦值较小时,夹角就会越大,这时b1和b2之间夹角连线的最大点就由c2来定义。
2)判断c2的夹角是否为钝角。如果交点加入到轮廓线时,操作正常,那么b1、b2的夹角就是钝角,若操作失误,所有的交点就会加入到其余原始轮廓线内;判断夹角的余弦值是否满足条件,主要原因在于当余弦值在0°~180°以内时,它的最小余弦值就是夹角的最大点。当余弦值为负数时,此夹角就是钝角。通过上述两点就能够对c2进行判断,根据判断结构将其加入到b1b2这条轮廓线中。
3)利用上述流程对交点进行判断,将判断结果输入到与其相对应的轮廓线中,并对排序之后的交点进行连接,从中取得剖面轮廓线,完成对剖面轮廓线的提取。
通过利用光切法对立体图像进行预处理后,将分割后的光带进行轮廓线处理,根据图像的剖切构建成三维形体;通过切面与断层轮廓线的交点,采用凸包压入法将无序点集用作初始轮廓线,把包络于初始轮廓线内的点均添加到轮廓线中,从中获取完整的剖面轮廓线,以此实现对剖面轮廓线的提取。
4 实验与分析
为了验证基于光切法的立体图像任意剖面轮廓线提取方法的整体有效性,需要对该方法进行实验对比测试。
采用基于光切法的立体图像任意剖面轮廓线提取方法(方法1)、基于深度学习的跑道前视红外图像轮廓线提取方法(方法2)和利用原始激光雷达点云数据提取渐进式建筑物轮廓线方法(方法3)对轮廓线提取进行测试对比。
1)设置轮廓线的长度取值为κ,采用方法1、方法2和方法3分别对轮廓线提取耗时进行对比测试,耗时越长说明提取速度越慢;耗时越短说明提取速度越快,测试结果如图3所示。

图3 轮廓线提取耗时测试
分析图3中的数据发现,随着轮廓线长度的提升,三种方法消耗的时间均呈现出上升趋势。当轮廓线为100mm时,三种方法的耗时相同,而轮廓线逐渐增加后,方法2的轮廓线提取耗时持续提升,上升速度高于方法1和方法3,可见方法2的耗时最高。相较于方法2来说,方法1和方法3的上升速度较缓,方法1的耗时最低,说明方法1的轮廓线提取速度最快。
综上所述,方法1的消耗时间最低,这是因为方法1对轮廓线进行提取前,优先对立体图像进行预处理操作,以此提升了轮廓线提取速度,进而降低了轮廓线耗费时长。
2)采用方法1、方法2和方法3分别对轮廓线提取完整度进行对比测试,测试结果如表1所示。
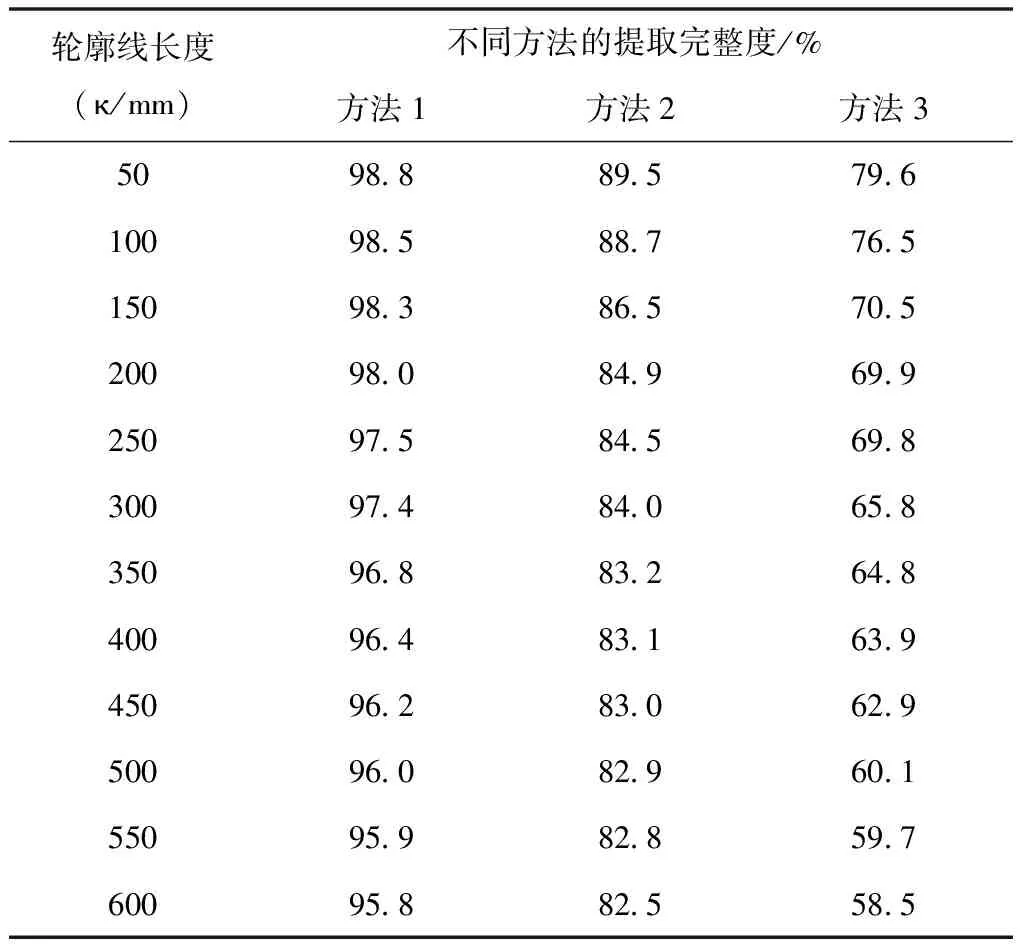
表1 轮廓线提取完整度对比测试
分析表1中的数据发现,随着轮廓线的增加,方法1的提取完整度最高,方法3的提取完整度最低。
3)为了验证轮廓线的提取效果,需要对该图像进行轮廓线匹配,将匹配结果与实际结果进行对比,匹配效果与实际效果越吻合,说明轮廓线提取的效果越好,具体测试结果如图4所示。

图4 三种方法与实际轮廓线匹配对比测试
根据图4可以发现,方法1与实际轮廓线匹配结果相同,而方法2有一处与实际结果不同,方法3有两处与实际结果不同,可见方法2和方法3的提取效果不够完善,与实际结果存有误差。
5 结束语
轮廓线的提取对工业发展及医疗诊断等领域有着重要作用,针对轮廓线提取存在的问题,提出基于光切法的立体图像任意剖面轮廓线提取方法。该方法首先采用光切法对图像进行预处理和分割等操作,根据立体图像切面与断层之间的交点,将其添加到轮廓线中,以此取得完整的剖面轮廓线,完成对剖面轮廓线的提取,该方法对剖面轮廓线提取的有效性有着显著帮助,为今后轮廓线提取方法提供了重要信息基础。