下水道除污机器人控制系统设计*
2021-08-18彭小平凌双明
彭小平,凌双明
(长沙航空职业技术学院,湖南 长沙 410124)
随着我国城市建设不断发展,城镇化程度越来越高,城市下水道经常堵塞,特别是二三线城市的老城区,堵塞的现象非常普遍,堵塞原因很多:如地沟油脂、生活垃圾、枯枝树叶等等。下水道堵塞轻者造成污水横流道路积水,重者引起管涌,冲走井盖,造成人身财产安全事故。下水道需定时疏通和维护。由于下水道环境恶劣,传统的疏通作业需要人工掏挖等强力劳动,需要耗费大量的人力物力。每年因为下水道检修而引发的伤亡安全事故让人触目惊心,目前虽然工业机器人得到蓬勃发展[1,2],但是下水道除污特种机器人目前处于起步阶段,本设计以履带式小车为装载平台[3,4],以西门子S7-1200PLC为主控制器,以MCGS触摸屏为人机交互界面、通过远程无线遥控技术、伺服运动控制技术,实现对下水道机器人的控制。下水道清污机器人,对需要清理的下水道,采用摄像头探测管内工况,对管壁粘附物及堵塞情况,远程监控调节机械臂与工作台的位置;清理方式则采取控制机械臂可以抓取堵塞物,或者通过连接到机械手臂上的与强力泵连接的水管实现真空抽污,也可以通过连接在机械手上的水枪配合冲洗管壁,实现联合除污或者去除堵塞物达到疏通地下管网的目的。
1 除污机器人控制系统硬件设计
1.1 除污机器人整体设计
除污机器人主要由小车履带系统,左右转盘及驱动系统,上下摆动电机及驱动系统,机械手伸缩、夹紧松开、喷头系统组成。原理示意图如图1所示。
1)小车履带系统
小车履带系统两台电机M1、M2的正反转控制,M1、M2电机正转小车前进,M1、M2电机反转小车后退,M1电机正转小车右转,M2电机正转小车左转[5]。
2)左右转盘及驱动系统
左右转盘由步进电机和步进电机驱动器组成,除污机械手装置平台的旋转由步进电机M3控制,实现对机械手左右转动位置的精确定位控制,并由MCGS实时运程显示当前位置。
3)上下摆动电机及驱动系统
上下摆动电机由伺服电机M4和伺服电机驱动器组成,实现对机械手上下摆动角度的精确定位控制,并由MCGS实时运程显示当前角度。
4)机械手伸缩、夹紧松开、喷头系统
机械手伸缩由YV1、YV2三位四通电磁换向液压阀组成,除污机械手伸缩由电磁阀YV1、YV2控制,机械手夹紧松开由电磁阀YV3、YV4控制,高压喷水、喷洗涤剂分别由YV5、YV6控制。
1.2 除污机器人PLC控制系统电气接线设计
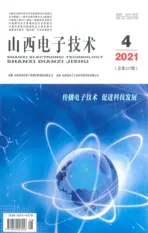
1)PLC的型号选择西门子公司的S7-1200系列,CPU选择1215C DC/DC/DC晶体管输出型,版本号6ES7 214-1HG40-OXBO。根据需要的元器件和PLC的接线口设计PLC的I/O电气接线图,如图2所示。机械手及小车对应的动作分别都有相应的按钮及操纵杆行程开关进行检测控制,小车履带系统由四个接触器KM1、KM2、KM3、KM4控制两台电机M1、M2的正反转。转盘步进电机M3脉冲及方向分别由Q0.3、Q0.4控制,机械手的伸缩、夹紧松开分别由相应电磁阀控制,并在电气控制上实现了限位保护、电气互锁。PLC与无线收发装置由F49DL的接线为:PLC的485模块的TX端接F49DL的RX端,485模块的RX端接F49DL的TX端,485模块的VOUT端接F49DL的VOUT端,485模块的GND端接F49DL的GND端。
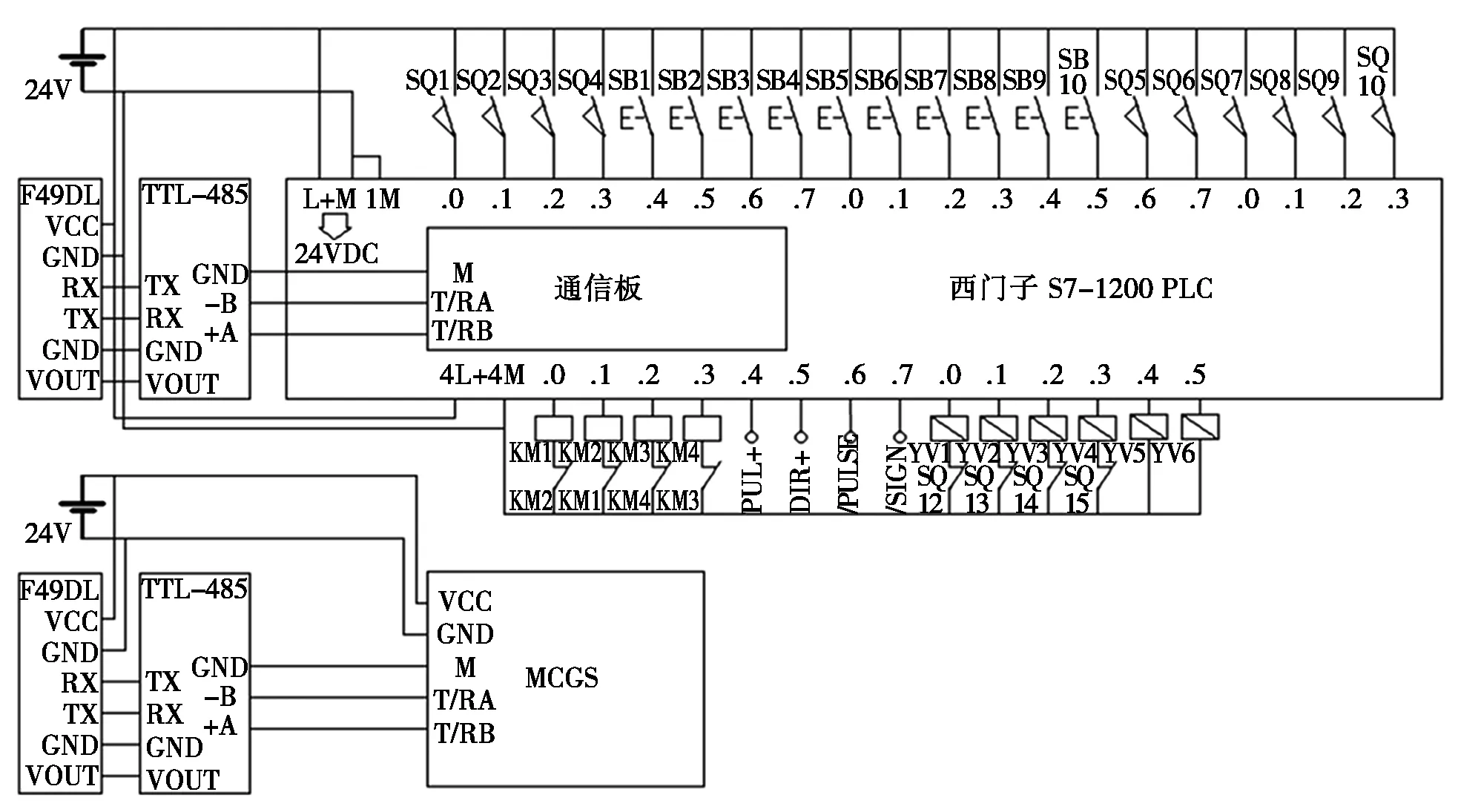
图2 PLC及触摸屏控制系统电气接线图
2)触摸屏:触摸屏选用的是昆仑通态TPC7062Ti触摸屏,它是以先进的Cortex-A8 CPU为核心的高性能嵌入式一体化触摸屏。该产品设计采用了7英寸高亮度TFT液晶显示屏同时还预装了MCGS嵌入式组态软件,具备强大的图像显示和数据处理功能。编程便捷,通过组态软件设计能远程监视机械手执行元件的当前状态和控制机械手各功能的动作。触摸屏485模块的TX端接F49DL的RX端,485模块的RX端接F49DL的TX端,485模块的VOUT端接F49DL的VOUT端,485模块的GND端接F49DL的GND端。
3)无线收发装置:无线收发装置由F49DL模块和TTL-RS485模块和天线组成,实现MCGS与S7-1200PLC的无线数据交换。F49DL是一款工作在433M频率空中速率可达9600bps的无线数传电台,工业级无线通信设计、专利技术的滤波器设计,准军工级抗干扰能力。频率范围431~435MHz,提供16个信道可选,射频功率0.5W和3.0W可选,适合<8km距离内无线通信连续传输技术,串口接收同时并进行射频发送,通信延时极短TXCO高精度温补晶振,恶劣环境下频率偏差±0.5PPM图形化的参数设置及测试软件,便于快速配置和调试,内置纯硬件定时看门狗,适合无人值守24小时运行的应用环境。
2 除污机器人PLC软件设计
2.1 TAI V16硬件组态
1)在博图TAI V16软件中新建PLC项目,选择设备与网络中添加新设备,在控制器中双击SIMATIC S7-1200,再双击CPU,再双击CPU 1215CDC/DC/DC,选中6ES7 215-1AG40-0XB0,点击添加。
2)选择通信板型号,在通讯板下的点对点下的CB1241(RS485)中的6ES7 241-1CH30-1XB0。
3)设置通信模块参数,设置CB 1241(RS485)常规中的参数,波特率设为9.6Kbps、奇偶校验设为无、数据位设为8位/字符、停止位设为1、等待时间设为20000ms。
4)设置脉冲发生器PTO1/PWM1,进入脉冲发生器(PTO/PWM)中的PTO1/PWM1,设置脉冲选项中的信号类型为PTO(脉冲A和方向B),如图3所视,后面再设置脉冲发生器PTO2/PWM2的步骤同理。
5)添加工艺对象轴_1,运动控制TO_PositioningAxis,设置工艺对象轴_1,选择轴_1中的组态,基本参数中的常规,测量单位设为脉冲。设置工艺对象轴_1基本参数驱动器项,硬件接口中的脉冲输出设为%Q0.4,方向输出设为%Q0.5,如图3所示。设置工艺对象轴_1扩展参数常规项,最大转速设为320.0,启动/停止速度320.0。
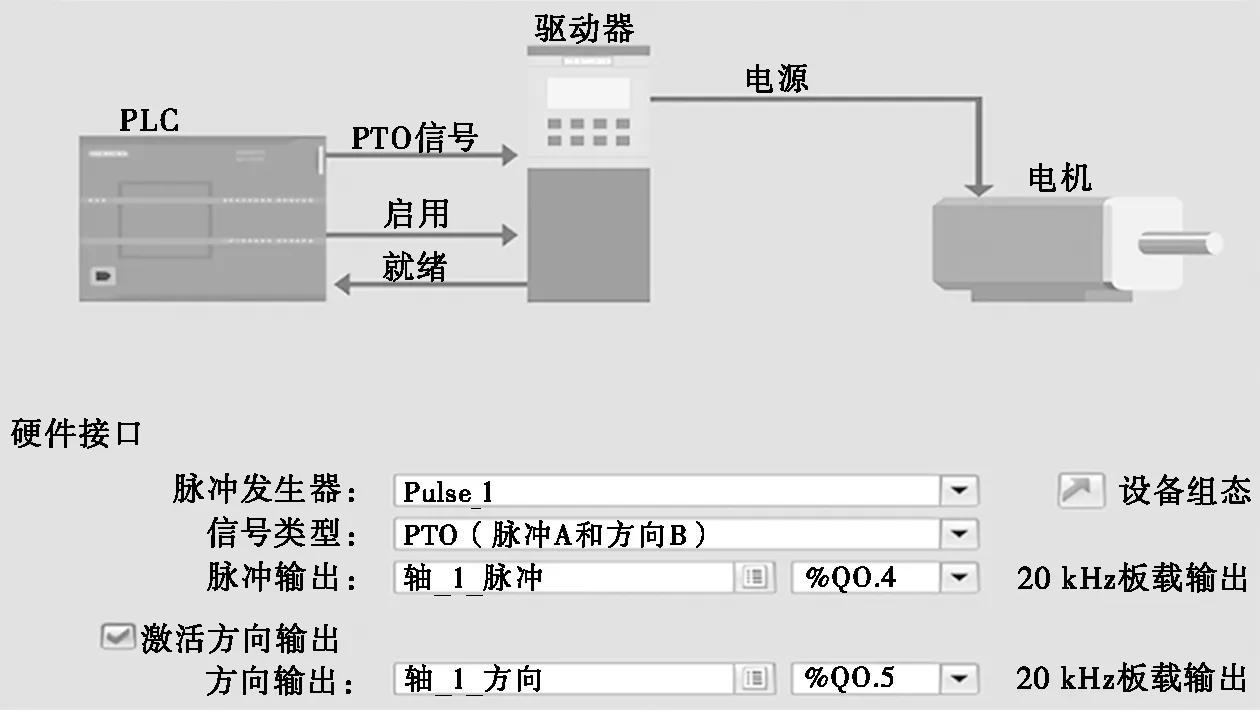
图3 设置工艺对象轴_1基本参数驱动器项
6)添加工艺对象轴_2,运动控制TO_PositioningAxis,设置工艺对象轴_2,选择轴_2中的组态,基本参数中的常规,测量单位设为脉冲。设置工艺对象轴_2基本参数驱动器项,硬件接口中的脉冲输出设为%Q0.6,方向输出设为%Q0.7。工艺对象轴_2其他设置和工艺对象轴_1相同。
2.2 TAI V16梯形图设计
1)编辑块标题和块注释,用“MB_COMM_LOAD”指令设置组态端口使用 Modbus RTU 协议来通信。RS485Modbus通讯初始化参数设置,EN为使能端,REQ在上升沿执行指令,PORT通信端口的ID。也可以在变量表的“常数”(Constants)选项卡中引用该常数。BAUD波特率选择:300、600、9600、…115200。PARITY奇偶校验选择:0-无、1-奇校验、2-偶校验。MB_DB是“MB_MASTER”或“MB_SLAVE”指令的背景数据块的引用,在程序中插入“MB_SLAVE”或“MB_MASTER”之后,数据块标识符会显示在MB_DB框中,如图4所示。
图4 块标题和RS485Modbus通讯初始化参数设置
2)“MB_SLAVE”指令允许程序作为Modbus从站使用点对点模块(PtP)或通信板(CB)上的端口进行通信,MB_ADDR是Modbus从站的站地址(地址范围:0至255),设为1,S7-1200作为Modbus从站一,MB_HOLD_REG指向Modbus保持性寄存器数据块的指针。设为P#M0.0 WORD 20。“MC_Power”运动控制指令可启用或禁用轴。Axis轴工艺对象,Enable设为TRUE-轴已启用、FALSE-根据组态的“StopMode”中断当前所有作业,停止并禁用轴,StartMode设为0-启用位置不受控的定位轴,1-启用位置受控的定位轴。Axis设为轴_1,Enable设为true以启用左右步进电机M3,如图5所示。
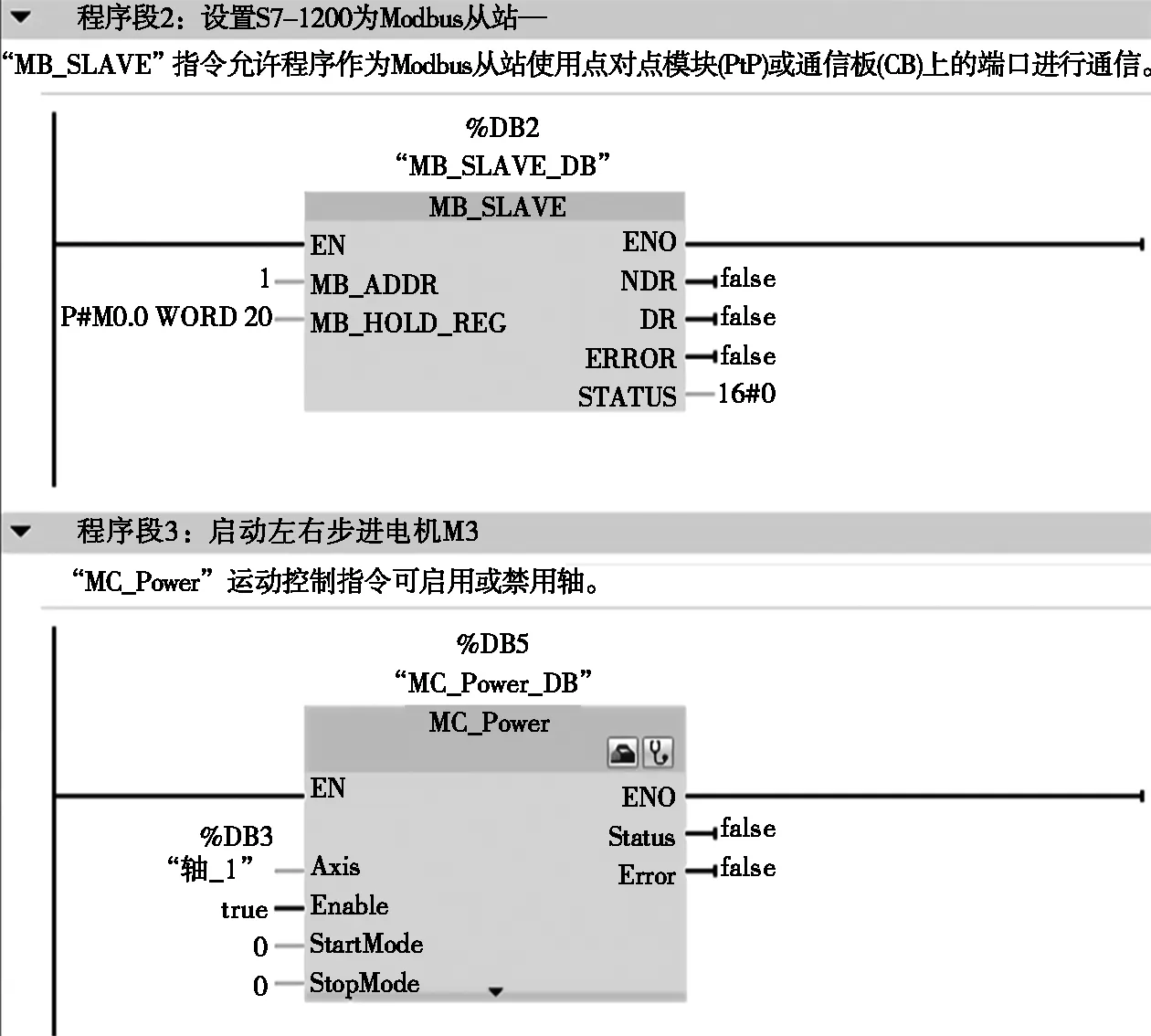
图5 S7-1200作为Modbus从站一设置、启用左右步进电机M3
3)Axis设为轴_2,Enable设为true以启用上下伺服电机M4。“MC_Home”运动控制指令可将轴坐标与实际物理驱动器位置匹配。Execute上升沿时启动命令,Position在Mode=0、2和3完成回原点操作之后,轴的绝对位置,Mode=1对当前轴位置的修正值,限值:-1.0E12≤Position≤1.0E12,Mode回原点模式。Axis设为轴_2,Execute设为FirstScan,Position设为0.0,Mode设为0,启动时初始化轴_2的当前位置为0.0。
3 控制系统触摸屏MCGS组态软件设计
1)触摸屏通过无线网桥进行中继连接到PLC的接口。在TPC7062TI人机界面上设计组态画面,如图6所示,要求用户窗口包括机器人的实时工作状态显示:左右履带电机的前进后退状态显示、工作转盘左右转动显示,机械手摆动电机上下摆动指示,机械手的伸缩、夹紧松开指示、喷头高压喷水、喷洗涤剂指示,对应动作的按钮操作、操纵杆控制小车方向及移动。
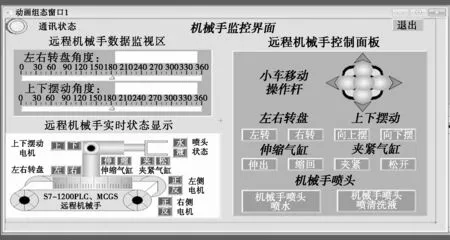
图6 MCGS触摸屏监控界面
2)创建一个实时数据库,在数据库中添加数据对象,分别将画面中图像关联数据,根据控制要求选择开关量、数值量、事件量,字符量。
3)触摸屏与S7-1200PLC的数据连接。双击设备窗口,右击后在设备工具箱中选择通用串口父设备,添加莫迪康ModbusRTU。然后在里面进行数据关联。
4)DM10和DM14的通道处理,把电机的脉冲量转换为角度量,3200个脉冲为一圈。
4 结语
本设计以履带式小车为装载平台,以西门子S7-1200PLC为主控制器,以MCGS触摸屏为人机交互界面,通过远程无线遥控技术,伺服运动控制技术,实现对下水道机器人的控制,节约了人力物力,有较好的应用和推广价值。