“低慢小”飞行器自动检测及反制系统*
2021-08-18武卯泉
武卯泉
(山西省信息产业技术研究院有限公司,山西 太原 030012)
1 研究背景、目的和意义
“低慢小”飞行器是指在低空或者超低空领域飞行速度较慢的小型飞行目标[1,2],例如无人机等航空器。由于缺乏有效技术手段进行监控,导致对于无人机的监管力度明显滞后,从而对国家安全和社会安全产生负面影响[3]。尤其在国家保密部门和一些军事涉秘场所,对无人机的监控与反制,已经到了刻不容缓的地步。
在军用领域,我军的海军和潜艇基地,长期有被偷拍侦测的风险,在重要军事设备的生产基地、试验基地、演习基地、军队驻地、主要领导和军事机关驻地(包含海外驻地)、重要战略设施等,都有被无人机非法入侵和侦查的风险存在[4]。
尽管部分无人机企业在其产品中为无人机飞行划定了禁飞区域,但仅限部分区域。无人机配件在网上到处有卖,自主DIY很容易就能够组装一台能够飞行的无人机[5],门槛并不高。特别是多数的无人机用户出于各种目的,通过购买零件改装拥有了无人机,没有经过飞行及安全培训,就在各种不适合飞行的场合飞无人机,近来出现了多次的安全事故[6]。所以对无人机的管控很难做到面面俱到,除了从源头抓起,需要做到未雨绸缪,处置和防范措施也迫在眉睫。
2 系统工作原理
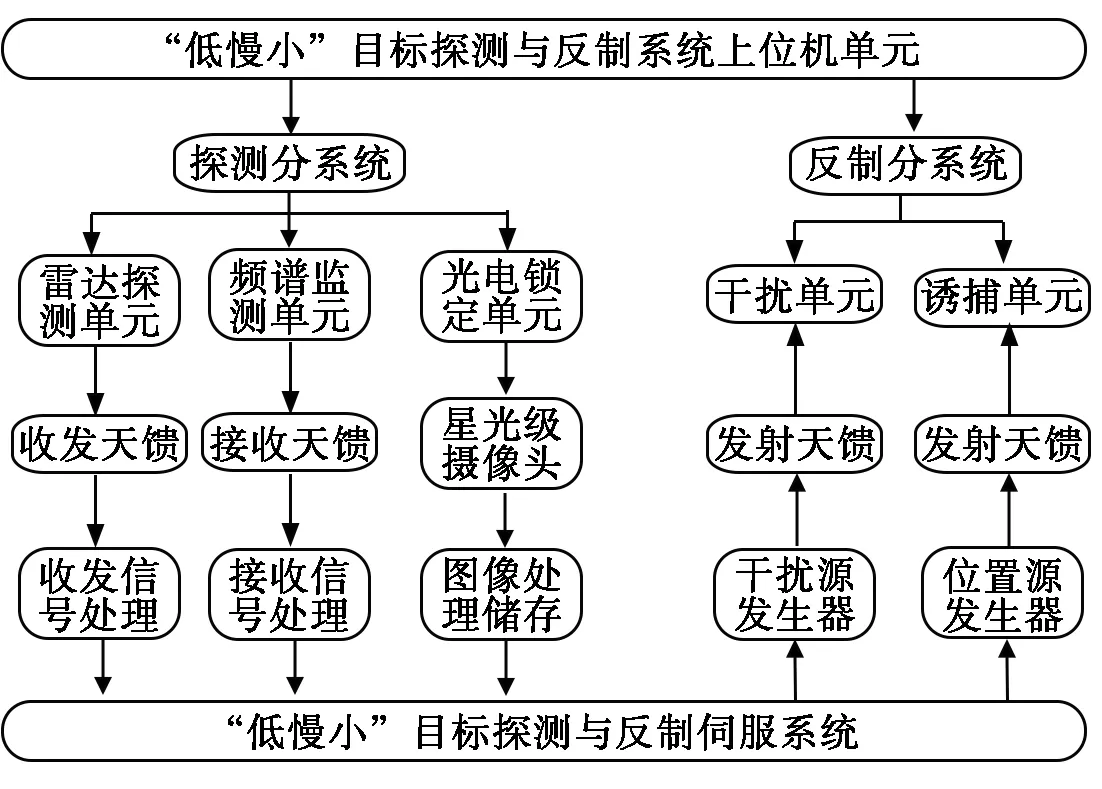
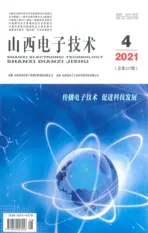
图1 系统工作框架
2.1 “低慢小”飞行器的探测
系统开机后,首先是雷达开始工作,雷达具备对各类微型无人机远距离探测、发现能力,同时具备全时、特定防控区域不间断扫描的特点;待雷达前端发现目标后进行声光报警,并按照设定上报机制上报目标点的方位信息给指挥系统。
2.2 “低慢小”飞行器的锁定
系统进行判别后,光学视频跟踪系统接受来自指挥系统的指令,实现对目标的识别、确认、跟踪、锁定,并将锁定信号回传指挥系统。
2.3 “低慢小”飞行器的反制
在数字地图同时会显示目标的经纬高三维坐标,确认要对无人机进行打击,迫使它返航或者就地降落,这个时候可以通过软件打开打击设备。如果在目标进入系统1km的打击区域,也可以选择使用无人机诱捕设备来迫使无人机降落在指定地点。
3 结构设计
3.1 总体设计
陆基三坐标”低慢小”飞行器自动检测系统由支撑部分、天线部分和接口设备组成,支撑部分根据安装形式的不同可以选择三脚架支撑,也可以选择地面固定的支撑方式;天线部分包含天线罩、平面阵列天线、频率综合模块、全固态收发模块、信号处理机、二次电源以及伺服驱动器;接口设备包含供电单元和终端显控单元。系统组成框图如图2所示。
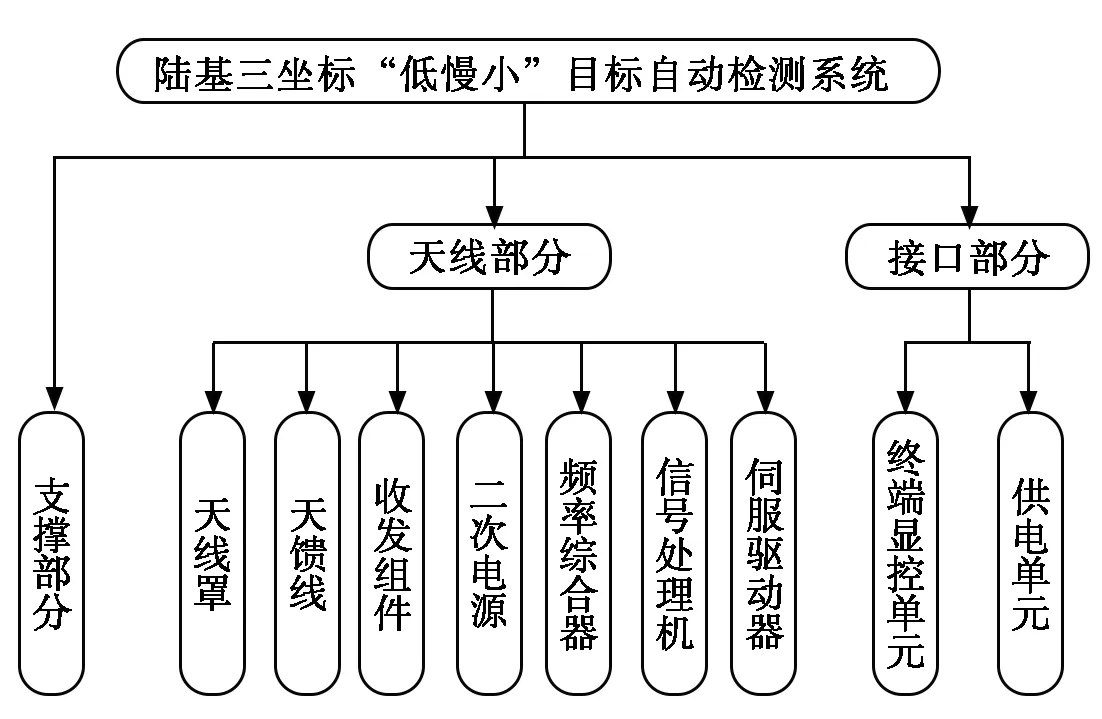
图2 系统组成框图
天线部分包含天线罩、平面阵列天线、信号处理机、收发分系统、伺服驱动分系统。其中信号处理机、收发系统以及伺服系统位于方位转台下的腔体内,平面阵列天线位于方位转台上方,由伺服驱动电机带动转台实现天线阵面的方位回转。
为了满足恶劣环境下产品的使用要求,整机采用全密封设计,结构上分为上下两个密封的腔体,上腔体(天线罩)内安装天线,其余部分集中安装在下腔体内,并通过腔体外部的散热尺,实现传导散热,保证设备正常工作;同时为降低日照带来的高温对系统的影响,将雷达外部整体涂覆,颜色选为对日光吸收率较低的白色。
3.2 天馈线分系统
天线用于实现向自由空间辐射电磁能量,并接收目标回波信号。该天线采用平面阵列天线形式,具有重量轻、无色散、损耗相对较低等特点。
天线由平面阵列天线和天线罩组成,天线的主要技术指标如下:
天线形式:和差通道平面阵列天线
天线尺寸:400mm×260mm(宽×高)
极化方向:水平极化
天线增益:≥26dB(含天线罩)
波束宽度:方位5.2°
仰角: 8.0°
副瓣电平:方位副瓣电平≤-30dB
仰角副瓣电平:≤-25dB
图3 方位和差波束接收方向图
3.3 收发系统
收发系统由频率综合模块和固态收发模块组成。
频率综合模块集成了锁相环路、DDS及混频器等,用于将晶振产生的基准信号进行变频、调制等处理,分别将射频激励信号、本振信号及频标信号提供给发射放大支路、接收变频支路。
固态收发模块(组件)集成了带通滤波器、功率放大器、环形器、低噪声放大器、混频器等,用来完成功率合成、接收信号低噪声放大、下变频等。
收发组件发射部分指标如下:
发射输出信号:
频率范围:10.38GHz~10.48GHz
频率步进:10MHz
跳频时间:≤10us
信号形式:线性调频(时宽25us,带宽2MHz)
简单脉冲(时宽0.5us)
输出信号相噪:
≤ -60dBc/Hz (偏离载频10Hz处)
≤ -80dBc/Hz (偏离载频100Hz处)
≤ -90dBc/Hz (偏离载频1kHz处)
≤ -95dBc/Hz (偏离载频10kHz处)
≤ -95dBc/Hz (偏离载频100kHz处)
≤ -115dBc/Hz (偏离载频1MHz处及以远)
3.4 信号处理器
信号处理器的主要功能包括:中频回波采样、DDC、脉冲压缩、MTD、CFAR恒虚警处理、杂波图、统计门限检测、和差比幅测角等处理技术来完成雷达回波信号的检测和目标信息的提取;另外还具备系统工作提供定时产生功能,全系统故障实时监控功能等。
信号处理部分指标如下:
距离处理范围:0.075km~15.0km
处理脉冲宽度:25μs、0.5μs
脉冲重复周期:130μs
距离量化:60m
A/D位数:14位
MTD点数:4096
动目标改善因子:≥52dB
中频采样:采样率40MHz、抽取率16(工作带宽2.5MHz)
3.5 伺服驱动器
伺服系统的主要功能是接收雷达终端监控指令,在控制驱动板上进行处理后,驱动电机带动天线按一定的速度进行转动;伺服系统主要由光电编码器、直流有刷力矩电机、驱动控制板组成。
伺服系统部分指标如下:
扫描方式:方位俯仰两维机械扫描
扫描范围:-178°~+178°
扫描速度:6°/s
定位精度:0.3°
控制精度:0.3°
天线控制方式:程控
方位编码精度:14位
供电:+5V,+24V
功耗:≤20W
3.6 雷达遥控终端
雷达遥控终端主要完成雷达的管理功能和目标信息的显示功能。
雷达遥控终端通过以太网和信号处理器通信,完成雷达工作指令的下发(工作频率、发射控制、伺服控制等),并接收信号处理器上报的雷达工作状态信息、点迹信息等。操作手通过雷达遥控终端实行对雷达工作参数的设置;雷达遥控终端通过PPI界面和表格显示区对目标信息进行显示;雷达遥控终端可以实现对目标信息、原始视频信息进行显示,也可以通过图形化的故障监控界面,辅助操作人员对出现的故障进行准确定位;雷达遥控终端还可以完成与光电系统的数据融合处理以及与上一级监视网的互通互联等功能。
雷达遥控终端硬件选用Pentium4CPU 2.9GHz、内存2GB,显存1GB,分辨率为1024×768的通用计算机平台;操作系统选用Windows XP,采用基于DirectDraw以及OpenGL的3D图形开发,为操作人员提供友好的人机界面显示;利用分层技术实现PPI底层画面、点迹以及杂波信息的显示;具备故障信息的闪烁指示功能;提供回波数据的实时录取、存储与回放功能,便于数据的查询与分析;同时PPI显示界面特有的局部缩放与中心平移功能、地图显示等功能也为用户的使用提供方便。
3.7 定位定向设备
定位定向设备(选配)用于完成雷达定位、定向、授时功能。
定位精度:
位置精度:≤5m(CEP)
高程精度:≤10m(RMS)
定向精度:≤0.18°
在不选用定位定向设备时,雷达可以通过终端进行系统授时,系统也可以借助有关的光学设备完成方位标定等工作。
4 结论
陆基三坐标”低慢小”飞行器自动检测系统的设计满足技术指标,风险可控,具有较好的可实现性。设备在反无人机领域起着先导作用,并且不受恶劣天气影响以及具备一定的复杂电磁环境的处理能力。”低慢小”飞行器越早发现,提供给后端处置设备准备的时间就越充裕,为实现精准打击提供保障。
但是作为探测设备,它也有不足之处,比如满足不了百分百识别和确认,只能根据速度、高度及在地图中的地理位置做出大致判断,同时,根据反无人机的需求,发现是为处理做准备,所以还需要光电作为辅助手段进行认证,不能盲目去处理。
本研究所研制的监视雷达具有较优异的低慢小目标探测性能,且已经完成产品定型及部分站点的试装,具备较为真实的实测效果及用户反馈。