基于交通路锥识别的车辆安全引导方法
2021-08-16彭陆亚静张洪昌
彭陆亚静,张洪昌
(武汉理工大学汽车工程学院,湖北 武汉 430070)
1 引言
目前中国汽车产业“新三化”的发展已成为趋势,车辆智能化越来越受到业界的重视,其中有关道路目标的识别也日益丰富,主体重心都放在车辆识别和行人识别上。对于施工路段等特殊工况,具备自动驾驶功能的车辆多采取保守的方式,将行驶交给驾驶员控制,但由于驾驶员注意力分散或行驶方向上有其他车辆等障碍物遮挡,容易造成驾驶员对前方施工路段的忽视,从而干扰正常行驶。因此,在施工路段等特殊工况下的智能化研究具有重要意义。
交通路锥的识别并生成安全区域,是对车辆智能化的重要补充。特斯拉于2019年公开更新的辅助驾驶系统中,其车载摄像头成功识别部分交通路锥,并生成相应行驶路径区域,但目前只是测试阶段,且存在对交通路锥识别丢失和对其他障碍物的误识别等问题。但特斯拉表示,有关交通路锥的识别和安全区域划分仍是重要研究方向。
本文利用的传感器为激光雷达,其具有分辨率高、抗有源干扰能力强、低空探测性能好、体积小、质量轻等优点,目前已被广泛运用于目标探测识别。在自动驾驶领域,由于其可以显著提高自动驾驶系统的可靠性,因此被认为是L3级及以上自动驾驶必备的传感器,具有广阔的发展前景。
基于以上情况,本文提出了一种基于交通路锥识别的车辆安全引导方法,用于车辆在交通路锥引导路段的安全区域划分和引导路线生成,以补充有关交通路锥识别和安全区域划分的研究。
2 方法总体设计
本发明提供的基于交通路锥识别的车辆安全引导方法,其流程如图1所示,主要由车载激光雷达、车辆加速度传感器、图像显示器和若干接口电路组成。车载激光雷达提供原始三维空间坐标位置信息,结合雷达安装位置进行坐标系转换。同时采集车辆加速度传感器发送的车辆各方向加速度信息,共同传至车辆ECU,利用本方法进行适应车辆姿态的坐标系转换,从而简化后续计算的计算量。再利用本方法对交通路锥进行识别,将处理后的交通路锥信息传入图像显示器,从而显示车辆安全区域和引导路线。
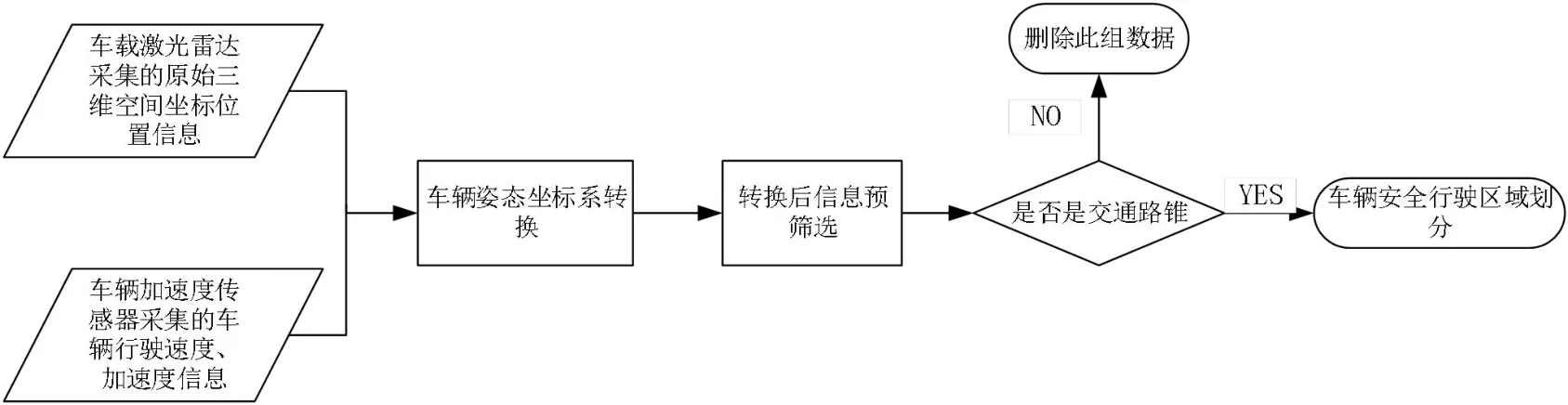
图1 结构流程图
车载激光雷达安装在车顶,安装后对其位置进行校对,以获得其相对车辆质心的角度,将角度信息通过对应的接口电路传至车辆ECU,将原始三维坐标位置转换至车辆质心。所述的车辆加速度传感器安装在车辆质心附近位置,对其安装位置进行校对,将测得的车辆各方向加速度信息通过对应的接口电路传至车辆ECU,将预处理坐标信息进行适应车辆姿态的坐标系转换。
所述的图像显示器由车辆ECU将处理后的车辆安全区域和引导路线,通过输出电路将信号传入图像显示器,用于显示车辆安全区域和引导路线。
3 基于交通路锥识别的车辆引导方法
本发明基于车载激光雷达和车辆加速度传感器的信息,通过对原始三维空间坐标位置信息、车辆行驶速度、加速度信息进行预处理、筛选,结合交通路锥特定外形特征,对车辆行驶前方交通路锥进行识别,结合车辆相对交通路锥位置,对处于交通路锥引导路段的车辆安全行驶区域进行划分,并计算出引导路线,结构如图2所示。

图2 结构示意图
3.1 车辆姿态坐标系转换
基于车载激光雷达采集的原始三维空间坐标位置信息和车辆加速度传感器采集的车辆行驶速度、加速度信息,对原始三维空间信息进行适应车辆姿态的坐标系转换,其计算方法为:
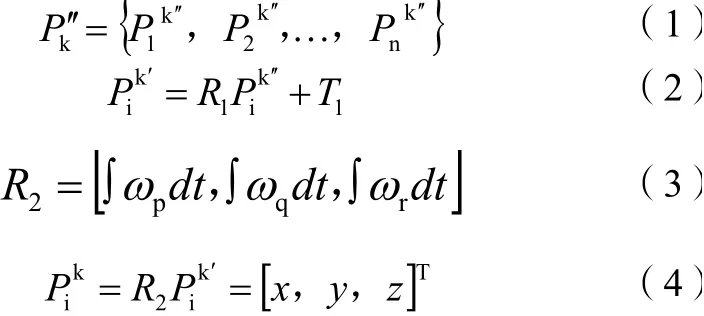
式(1)~(4)中:Pk〞为车载激光雷达自身坐标系下第k帧(k=1,2,3…)的原始数据点的集合;R1为车载激光雷达自身坐标系相对车辆质心的车辆坐标系的旋转矩阵,由安装位置决定;Pik'为车载激光雷达第k帧中第i个数据点转换到车辆质心的车辆坐标系的坐标;Pik〞为车载激光雷达自身坐标系下第k帧中第i个数据点的坐标;R2为自定义的旋转矩阵;ωp、ωq、ωr分别为车辆质心的侧偏角速度、俯仰角速度、横摆角速度;dt为车载激光雷达每帧周期;Pik为车载激光雷达第k帧中第i个数据点在第k帧中由于车辆行驶状态后变化的车辆坐标系下的坐标;T为车载激光雷达自身坐标系相对车辆质心的车辆坐标系的平移矩阵,由安装位置决定。
3.2 交通路锥的识别
在处理完原始数据之后,对转换后的数据点的进行密度聚类分组,将每组数据中第k帧有效坐标投影到车辆坐标系的YZ面,将YZ面划分为m×n个,l×l的矩形,(ymax/l)≤m<(ymax/l+1),(zmax/l)<n<(zmax/l+1),第s×t个方块中心坐标为统计每个方块包含点的数量nums×t,当nums×t>c时,即判断该方块为有效区域,c为预设阈值。
对筛选后的坐标信息进行处理,获得该组第k帧的两组YOZ平面上的近似曲线方程,计算公式为:

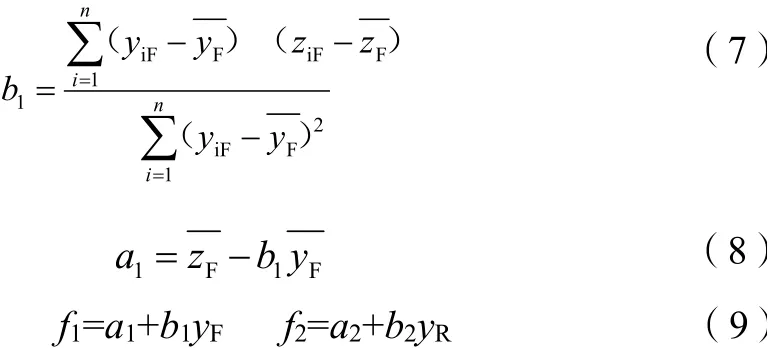
式(9)中:f1、f2分别为有效区域最左侧回归直线和最右侧回归直线;a1、a2分别为f1、f2在Z轴的截距;b1、b2分别为f1、f2在YOZ平面上的斜率。
上述方法中,将已处理后得到的数据,利用YOZ平面上的近似曲线方程,对每组第k帧后四帧有效数据取均值,其计算方法为:

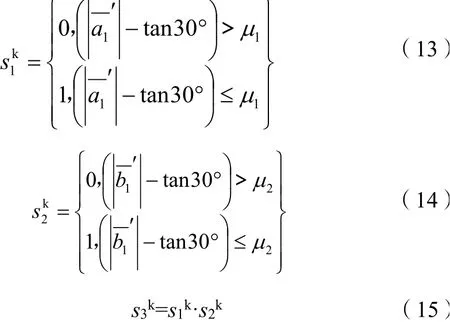
在得到均值后,对数据与交通路锥外形特征进行参数化比较,其计算方法为:
3.3 车辆安全区域划分
根据车辆自身所处车道位置,将已处理的交通路锥信息进行分组,得出车辆在不同车道行驶下的安全行驶区域,具体可分为两种状况处理:①状况1,车辆不处于交通路锥车道,车辆保持原车道行驶;②状况2,当车辆处于交通路锥车道时,计算安全行驶区域。计算公式为:
式(17)~(18)中:ki为第i组顶点与第1组顶点在XOY平面上的斜率;yi、xi为第i组交通路锥顶点车辆质心坐标系XOY平面上的纵、横坐标;i为数据的第i组,{i=1,2,…,n};n为总组数;fL表示过第1组、斜率为kmin组和第n组的二元方程式,即安全行驶区域为该曲线外侧范围。
4 实验验证
试验场地选择在武汉理工大学内校园路段,放置交通路锥模拟施工路段。实验车辆为一辆用于中国巴哈大赛的试验车辆,激光雷达采用速腾聚创公司的RS-LiDAR 32A雷达,加速度传感器采用耀配的GN1514B006AA型号加速度传感器。
在完成对激光雷达和加速度传感器位置的校对后,通过K66核心板对传入数据进行处理,并利用蓝牙模块将处理后的交通路锥传入显示屏。
车速控制在35 km/h附近范围,交通路锥数量为15个,交通路锥高度为500 mm,底座尺寸为320 mm×320 mm。调整交通路锥相对车辆的摆放位置,根据显示器显示内容对数据阈值进行不断调节,直至获得稳定的交通路锥引导区域。
经过7组实验,图像呈现出的安全行驶区域与实际相符合,基于交通路锥识别的车辆安全引导方法能够有效地在实验条件下生成安全区域,并成功生成引导路径。
5 结束语
本文介绍的基于交通路锥识别的车辆安全引导方法,适用于以交通路锥为引导路线的施工路段,为该路况下的车辆安全区域划分提供了一种思路。结合车辆各方向加速度变化,采取先适应车辆姿态的坐标系转换,减少后续运算量,并结合交通路锥特定外形特征进行识别,进一步提高了识别的准确性。本方法对车辆所处道路信息分类,结合上述交通路锥信息,可计算出两种情形下的安全行驶区域,进一步提高了计算的效率、准确性,从而有效地进行车辆安全区域的划分。
