空地域A2G大规模MIMO信道建模与分析
2021-08-07吴苏洁王学英吕智康
周 杰 吴苏洁 王学英 吕智康
(1 南京信息工程大学电子与信息工程学院, 南京 210044)(2 新泻大学电气电子工学科, 日本新泻 950-2181)
无人驾驶飞机(UAV)也被称为无人机,近年来逐步占据我国远程监控、中继通信、搜索救援等多个领域的市场份额[1].随着第5代移动通信技术(5G)的发展,车与无人机通信是目前研究车联网技术领域的热门议题,其对通信系统中的带宽、延时、覆盖密度等都有着极高的要求.而传统的MIMO技术已无法满足空地一体化中无人机与车之间的高速率数据传输要求.车的内部有足够大的空间安装大量天线,这为大规模多输入多输出(m-MIMO)技术在无人机地空通信中的应用提供了可能性[2].
文献[3]介绍了基于MIMO天线的5G空地环境(A2G)通信系统技术,通过建立传播信道模型,推导出发射机和接收机之间的传播特性,为无人机通信系统的性能设计和评估奠定了基础.
m-MIMO技术被应用于移动通信系统,可以提高频谱利用率,增加通信系统容量,已成为研究未来移动通信的关键技术之一,被广为关注.目前,通信设备日益向着小型化发展,这也导致天线阵元间距减小,当距离在一定范围内,阵列中的天线方向图会受到相邻天线辐射影响造成畸变,即互耦效应.娄晨等[4]研究发现降低衰落信号相关性和在一定范围内使用互耦效应可以提升信道容量.
Jin等[5]将接收机置于一个半径为R的球体内,通过研究到达角和发射角的关系来描述A2G通信的散射环境.Zhang等[6]通过引入时变角度参数将模型拓展为无人机 3D MIMO 非平稳信道模型,假设散射体呈瑞利衰落,发射机和接收机处于2个圆柱体中,推导出相关信道的传输特性及建立对应的仿真模型.然而上述文献未考虑天线阵元间互耦效应对系统的影响.
为了研究实际A2G环境下通信系统的性能,本文提出一种基于三维几何随机模型(GBSM)的m-MIMO天线三维空地信道模型.该模型考虑无人机与车的三维运动轨迹,通过理论模型推导出衰落信道空-时-频互相关函数封闭表达式,以及互耦效应下天线阵元间空间相关性表达式,通过调整模型参数分析其对空间特性以及信道容量的影响.最后,将仿真模型的理论值与以往文献实测数据进行比较,验证了推导结果的准确性.根据仿真结果得出提高m-MIMO天线信道容量的有效方法.
1 3D空间散射模型
1.1 空地域A2G模型
针对空对地点对点通信场景,建立如图1所示的空地域m-MIMO信道模型.无人机在天空巡航实时监控半径为R的马路范围,当小车即将进入该路段时,无人机将路段信息汇总,与地面接收机进行实时通信.假设无人机与接收机的散射体围绕在球体表面,无人机端具有P个天线单元,小车具有Q个天线单元.当无人机与小车天线信号传输时,空气中含有许多体积小于电磁波波长的微小粒子,电磁波在传输过程中发生散射,每个天线都拥有一组己侧可观察到的簇.C1、C3为无人机发射天线p在t时间观测到的簇集合;C2、C4为小车接收天线q在t时间观测到的簇集合.簇C3可以被发射天线p观测,但不能被接收天线q观测,与之相反,簇C4可以被接收天线q观测,但不能被发射天线p观测;簇C1、C2可同时被发射天线p和接收天线q可见.假设C1由A个散射体组成,C2由B个散射体组成,簇C1和C2间的传播环境被抽象定义为虚拟链.信号从无人机发射天线p处反射到C1,通过簇C1与C2的虚拟链,最后在簇C2处反射到小车的接收天线q.MIMO天线阵列的一个特征是团簇的生成与消失[7],假设NT为发射天线和接收天线可被观测到簇的总数,则其为簇C1和C2的交集,其中天线单元间距为δT和δR.

图1 空地域m-MIMO空间信道模型

1.2 天线阵列信道容量
假设无人机天线发射端相关性矩阵为单位矩阵,由定向频率下的频率非选择性衰落信道冲激响应决定,C为信道容量,其表达式为
(1)
式中,B为信道带宽;IQ为接收端Q维单位矩阵;SNR为传输信道中信噪比;H为信道矩阵,[·]*表示共轭转置;NP为信号发射端天线数目.
1.3 互耦效应
通信设备日益向着小型化发展,这也导致天线阵列阵元间距减小,当距离小于0.35λ时,阵列中的天线方向图会受到相邻天线辐射影响造成畸变,产生互耦效应,其中λ为波长.由于道路上不同小车之间距离较大,互耦效应的影响近似于无,故不考虑小车间互耦[8].互耦效应一般可以通过耦合矩阵体现,假设无人机与小车天线皆为半波偶极子天线,据此可得天线耦合矩阵CP表达式[9]:
CP=(ZA+ZL)(Z+ZLI)-1
(2)
式中,ZA为阵元在自由空间中输入阻抗;ZL为匹配负载;I表示电流矢量;Z为天线阵元间互阻抗矩阵,可表示为
(3)
当天线长度l=λ/2时,发射天线p端与接收天线q端间互阻抗Zpq(1≤p,q≤Q)为
Zpq=
式中,a、dh分别为相位常数和天线阵元间的距离和;Ci(x)和Si(x)分别为余弦积分函数和正弦积分函数,其表达式为
2 A2G信道脉冲响应及相关角度
2.1 脉冲响应

(4)
exp{-jλ((dUC1(t))TRU(t)DU+


(5)

(6)
(7)

(8)
(9)
(10)
(11)
(12)
(13)

2.2 发射角和入射角分布
非平稳情况下簇C1发生散射波的时变平均俯仰发射角(EAoD)α′U(t)和水平发射角(AAoD)β′U(t)可表示为
(14)
(15)

簇C2发生散射波的时变平均俯仰到达角(EAoA)α′C(t)和水平到达角(AAoA)β′C(t)可表示为
(16)
(17)

无人机在空中飞行,与小车的传播路径上存在障碍物阻挡或大气折射,造成大尺度衰落.冯·米塞斯分布(VMF)可以用于模拟多径衰落的MIMO收发天线的AoA和AoD的统计特性,对实际的信道环境具有较好的拟合效果.假定无人机与小车方位角以及俯仰角服从三维VMF分布,VMF分布函数定义为[11]

(18)
式中,I0(K)为零阶修正贝塞尔函数;α和β为信号的发射角(AoD)和到达角(AoA);α′和β′为AoA和AoD的平均值.当K趋向于无穷时,p(α,β)即为高斯分布.
2.3 生灭过程
Sen等[12]证明,由于接收机和发射机的运动,传输路径数量发生变化,导致簇产生和消失;同时,m-MIMO天线阵列也会带来空时域的非平稳性.因此对空地域无人机非平稳性信道建模尤为重要.为了探究信道在空时域中非平稳特性,本文采用生灭过程描述散射簇在时间轴上的演化.假设团簇中散射体的产生率和消失率分别设为σG和σR[13].每条路径在时间间隔[t,t+t′]内的生存概率P可利用下式计算:
(19)
式中,PF为移动团簇的概率.在时间间隔[t,t+t′]内,新生成的散射体数目Nnew为
(20)
对于重新生成的团簇,其多普勒频率、相对距离在[t,t+t′]时间间隔中需重新计算.
3 大容量m-MIMO非平稳3D宽带信道模型特性
为了深入分析空地通信正交频分复用技术,需要从多方面考虑信道相关特性.
1) 在考虑互耦效应情况下,小车接收天线阵元到达角空间相关函数rq为
(21)
式中,PA为接收天线平均功率;r(β)为互耦效应下的天线转置矢量,是通过耦合矩阵点成无耦合时接收信号处的天线矢量修正后得到的列向量;p(β)为入射波的功率方位谱.假设天线阵列中不存在互耦效应,空间相关性rnc为
(22)
式中,ωi为第i个采样脉冲的归一化加权系数.
在实际传播环境中,还需考虑天线单元间相互耦合情况,以接收天线q和q+1为例,其耦合效应下的空间相关性rq,q+1可表示为

(23)

(24)


(25)
式中,E[·]表示数学期望.
3) 当δT=δR=0时小车与无人机间的时间自相关函数rACF为

pU(α,β)pC(α,β)dαUdαCdβUdβC
(26)
式中,αU、αC、βU和βC分别为无人机与小车的俯仰发射角和水平接收角.
4) 多普勒功率谱密度SDPSD为时间自相关函数的傅里叶变化,即
(27)
本文提出的空地域m-MIMO信道模型具有通用性,如当无人机的高度H=0时,本文提出的信道模型能够有效地用来描述车对车通信场景,相关研究工作见文献[14-15].
4 数值结果与分析
本节将对模型进行仿真和分析,探讨不同条件下参数对通信系统的影响,以及分析如何提高该模型的信道容量.本文提出的空地域m-MIMO信道模型能够适用于6 GHz以下频段.在本节仿真中,采用2.4 GHz公开频段.
为验证模型的准确性,对数值仿真结果与实测数据进行对比分析.仿真参数如下:fo=2.4 GHz,无人机和小车阵列天线数量32,小车行驶速度8 m/s,无人机离地面高度H=50 m,与小车水平距离duc=50 m,小车天线俯仰角分别为0.3和0.05 rad;无人机飞行速度27 m/s,无人机天线俯仰角分别为0.2 和0.3 rad;团簇C1、C2运动速度为5 m/s,PF=0.3;信号发射角-π≤α≤π,到达角-π/2≤β≤π/2.
图2为天线间距和数量不同时入射角φR与信噪比不同取值下信道容量对比图.从图2(a)、(b)可看出,在一定范围内互耦效应可以增加信道容量,并且随着天线数量不断增加,信道容量增长速度逐渐降低,最后出现负增长状态,这是因为在有限区域内,天线数目的增多导致相邻天线间距降低,相关性逐渐增大,最后反而造成了容量的减少.从图2(b)、(c)可看出,当天线间距减小时,天线间相关性增大,互耦效应也逐渐加强,信道容量减少.结果表明,在天线数量一定范围内,增加天线间距和数量可以有效提升信道容量,并且随着信号俯仰扩展角的增加而增加.

(a) 天线间距δR/λ=5,天线数量P=Q=16

(b) 天线间距δR/λ=5,天线数量P=Q=32

(c) 天线间距δR/λ=1,天线数量P=Q=32
图3为无人机在空中不同飞行速度(VT)下的时间自相关函数图.由图可知,当t=0时相关性最大,随着时间t和时间间隔Δt的增大,相关性逐渐降低;并且无人机的飞行速度对时间自相关函数有着显著影响,当速度增加时,无人机与小车间距离减小,平面波从无人机到小车天线接收端路径长度减小导致时间自相关函数的数值降低,这与文献[16]的无人机低空椭圆模型中的时间自相关函数图非常吻合,证实了此模型可用来描述空地环境通信的可行性.
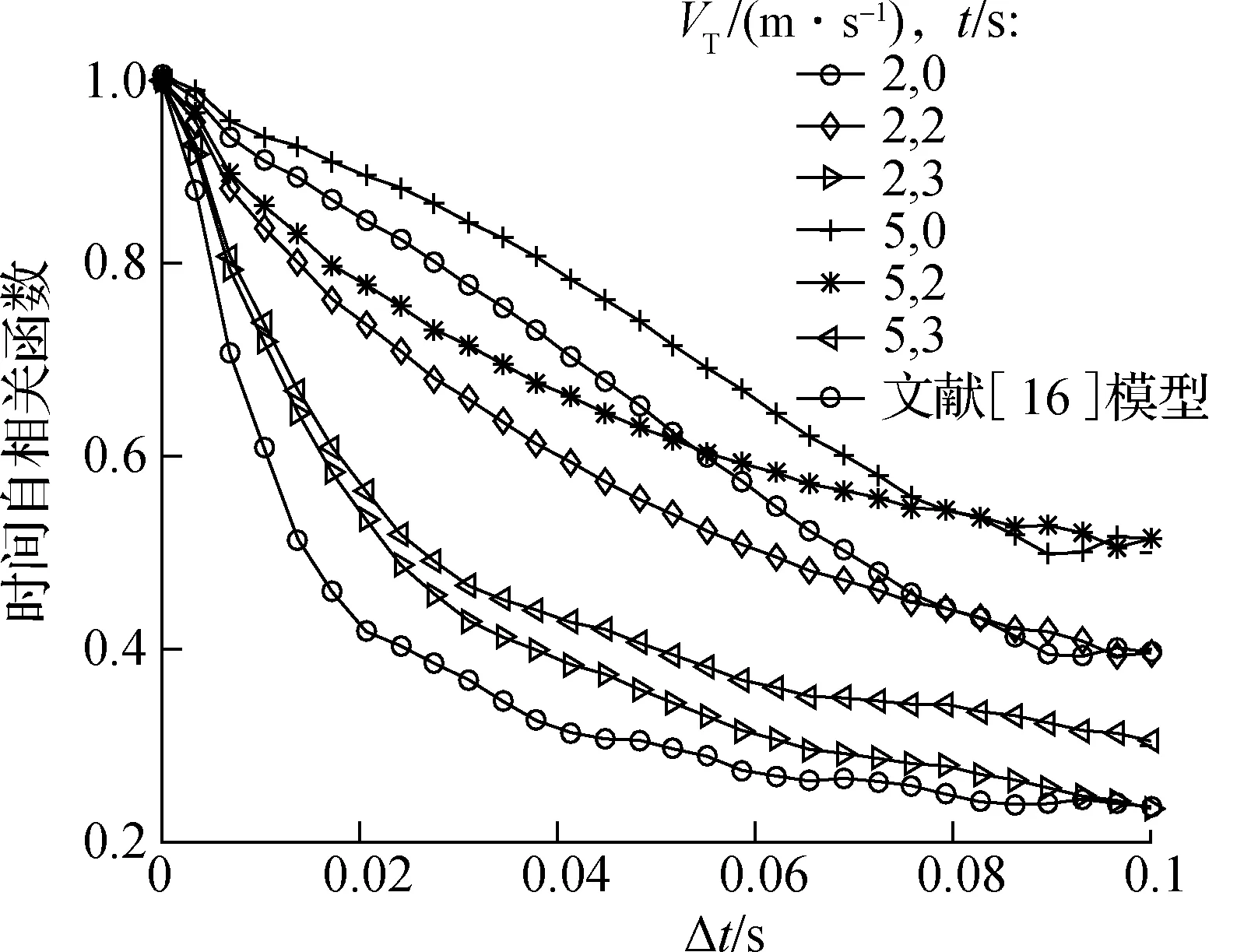
图3 不同无人机飞行速度下时间自相关函数
信号发射机的运动会对无线信道中多普勒频谱造成扰动.鉴于此,本文对自相关函数进行傅里叶变换,得到图4中不同无人机飞行速度的多普勒功率谱密度.由图可见,当无人机飞行速度越快时,散射簇的生灭速度越快,频谱密度越高.这与文献[16]构建的三维几何无人机对地通信信道模型的多普勒功率谱密度图走势类似,进一步说明了所提模型描述无人机对地通信系统的可行性.

图4 不同无人机飞行速度下功率谱密度
图5为小车在不同时间、莱斯因子、无人机飞行高度和无人机与小车阵列天线中心俯仰角γ情况下的空间域互相关函数关系图.从图5(a)可以看出,当莱斯因子取值越大,相关性越高;这是因为VMF分布的K值越大,局部散射点越集中,角度扩散越小,相关性越大.从图5(b)中可看出,当时间取值越长,相关性越小.由图5(c)可见,当无人机飞行越高时,与地面距离越来越远时,散射体也逐渐减少,无人机与小车的相关性越低,但超过350 m后相关性反而有所回升.由图5(d)可知,当俯仰角越大,无人机与小车的距离越远,空间相关性越低.当空间域相关性越低时,空间分集越大,m-MIMO天线阵列信道容量越大,这为改善信道容量提供了参考.

(a) 不同莱斯因子K取值(t=3 s,H=50 m,γ=π/5)

(b) 不同时间t取值(K=2, H=50 m,γ=π/5)

(c) 不同高度H取值(t=3 s,K=2)

(d) 不同俯仰角γ取值(t=3 s, K=2, H=50 m)
5 结论
1) 基于5G网络下的m-MIMO新技术,分析了现有空地域模型的特点与不足,对5G空地域m-MIMO信道模型提出新的要求.即该模型应对信道在空间域和时间域的变化进行分析,同时探究天线间互耦效应对空间域统计特性的影响,为空地域信道模型的建立奠定理论基础.
2) 为了更加贴合实际场景,假定信号的发射角和接收角服从VMF分布并提出散射簇数量的时变演进算法,推导其空时互相关函数;通过MATLAB仿真,验证该模型的可靠性.
3) 由于无人机和小车小型化,考虑天线阵列阵元中的互耦效应,对模型数据进行统计特性分析,推导出小车接收天线阵元间互耦效应下的空间域相关函数.由仿真可知,适当增加天线单元间距以及在一定程度内利用互耦效应可以有效提高信道容量.
4) 在今后的工作中,将引入毫米波频段进行空地域通信测量活动,探究毫米波对信道传播特性的影响,以及将毫米波与m-MIMO天线结合进行信道容量最大化策略设计.
