基于风险域的城市道路交叉口交通冲突分析方法
2021-08-07陆毅忱邹亚杰SELPISelpi
陆毅忱,邹亚杰,程 凯,郑 来,SELPI Selpi,朱 婷
(1.同济大学道路与交通工程教育部重点实验室,上海 201804;2.哈尔滨工业大学交通科学与工程学院,黑龙江哈尔滨 150090;3.查尔姆斯理工大学机械与海洋科学系,SE-412 96哥德堡)
城市道路交叉口是交通系统的重要节点,不同方向的交通流在此交汇,具有流量大、冲突多的特点,因此城市道路交叉口往往是交通事故的多发地。为了减少交通事故的发生次数,降低交通事故的严重程度,需要进行城市道路交叉口交通安全评价。
道路交叉口交通安全评价方法中较为常用的是基于事故数据的方法[1-2]和基于交通冲突的方法[3-6]。基于事故数据的安全评价方法是基于事故数、事故率等[7]指标进行评价,但该方法具有事后性,并受到历史事故数据的准确性、交通事故的小概率性和随机性的限制[8-9]。基于交通冲突的安全评价方法能够克服基于事故数据的安全评价方法的不足,在短时间内获得大量样本。交通冲突是指2个或2个以上道路使用者在时间和空间上彼此接近,以至于如果保持原有运动状态不变就会有发生碰撞的危险[10]。目前广泛采用的交通冲突度量指标主要是从空间或者时间的接近程度进行度量,具体分为距离度量指标、速度度量指标和时间度量指标3类,但前两者在实际中的应用较少[11]。最常用的是时间度量指标,包括碰撞时间(tTTC)[12-14]和后侵占时间[15-16]等。
随着图像处理技术的进步,目前已经存在部分由监控视频或无人机航拍视频提取的道路使用者轨迹所构成的公开数据集[17],详细记录了视频中每一帧下道路使用者的速度、加速度等运动状态信息以及其他有用的信息,为交通冲突分析提供了大量研究样本。Xing等[18]基于车辆轨迹提出了一种改进的tTTC算法,对两车质心进行矢量运算,并考虑两车车长对tTTC的影响,用于电子不停车收费系统(ETC)收费区上游的交通冲突计算。Ma等[19]对高速公路交汇处的换道冲突和追尾冲突进行研究,用Tracker软件提取车辆轨迹并计算追尾冲突和换道冲突,提出以小时冲突风险指数来表征该区域的交通安全水平。Jiang等[20]基于视频记录计算车辆与行人的轨迹以及tTTC,进而为驾驶辅助系统提供支撑。
虽然目前对于交通冲突识别的研究已经较为成熟,但是基于车辆轨迹的研究还停留在对tTTC等已有冲突指标的简单改进和实际应用上,较少考虑两车之间交通冲突的持续时间。本研究中提出风险域概念,采用一车在另一车风险域内的暴露时间来反映交通冲突的风险程度,并采用inD数据集对城市道路交叉口的交通冲突进行实证分析。
1 数据说明与处理
1.1 数据说明
本研究中数据源自inD数据集[17]。该数据集含有超过11 500条道路使用者的轨迹,涵盖车辆、自行车以及行人等。数据集是从无人机视频中提取的,视频的分辨率为4K(4 096×2 160),每秒25帧。视频拍摄于2017年至2019年之间,拍摄地点是德国亚琛市的道路交叉口,包括4个不同的道路交叉口。道路交叉口俯视图如图1所示。无人机拍摄时覆盖了80 m×40 m至140 m×70 m不等的道路交叉口区域,每个视频的拍摄时长在20 min左右[17]。

图1 城市道路交叉口图像Fig.1 Images of urban road intersections
图1中的4个道路交叉口均无信号控制,限速均为50 km·h-1,其中2个交叉口为十字交叉口,另2个交叉口为Y型交叉口。随机选取了12个轨迹记录文件进行交通冲突分析。为便于后续分析,对每个交叉口的每一个进口道依次进行编号,序号从1号至14号。
轨迹数据集中详细记录了每个道路使用者的基本信息和轨迹信息,部分信息如表1所示。

表1 in D数据集部分信息Tab.1 Part information of in D dataset
1.2 数据处理
本研究侧重于小汽车之间的交通冲突研究。首先,筛选道路使用者类型,仅保留小汽车的轨迹,剔除卡车、自行车以及行人等道路使用者的轨迹;其次,每个交叉口附近的车道都有车辆停放(见图1),在轨迹记录文件中,所有停放的车辆均被记录在内,但在进行交通冲突分析时需要将其剔除;再次,对于同时存在于视频中的车辆i和车辆j进行识别和匹配,将匹配成功的每两车记录为一组数据。车辆i的坐标位置为(xi,yi),速度为(vxi,vyi),车辆j的坐标位置为(xj,yj),速度为(vxj,vyj)。以车辆j为原点建立直角坐标系,计算车辆i对于车辆j的相对坐标(x ij,yij)以及相对速度(vxij,vyij),表达式分别为

最后,以车辆的前进方向为车头角度θ,以视频中的水平线为0°,沿着逆时针方向,车头角度依次增大,车头角度的范围为0°≤θ≤360°。同框的两车之间存在车头角度差Δθ,计算式如下所示:

参考替代安全评估模型对交通冲突类型的判定规则[21],计算两车车头角度差的绝对值,将交通冲突分为3种类型,即追尾冲突、换道冲突以及相交冲突。具体划分方法如表2所示。
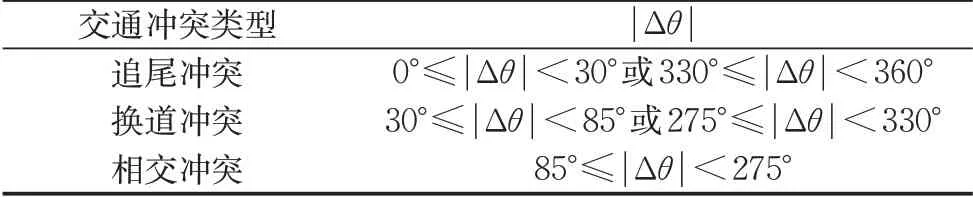
表2 交通冲突类型Tab.2 Types of traffic conflicts
2 基于风险域的交通冲突分析
提出了一种基于风险域的交通冲突分析方法。该方法为二阶段法,第一阶段进行交通冲突识别,第二阶段进行交通冲突危险程度判定。每匹配成功的两车为一个车辆对,将一个车辆对中的两车简化为车辆中心处的2个质点,并引入一个以其中一车为中心、综合考虑两车长宽的圆形风险域,如果另一车在未来某个时刻进入该风险域内部或经过风险域边界,则表明两车之间可能存在交通冲突,反之则不可能存在交通冲突。本研究中仅考虑两车之间的交通冲突,不考虑两车以上的交通冲突。
2.1 交通冲突识别
交通冲突识别前需要确定风险域的半径。以车辆j的中心为原点,划定一个半径为R的风险域,将车辆i视为质点。由于交通冲突考虑的是两车之间的相对运动关系,因此风险域半径受到两车的车辆长度W i和W j以及车辆宽度L i和L j的共同影响,计算式如下所示:

将车辆i第一次以当前相对速度行驶到车辆j风险域边界的时间定义为tTTR(time to risk region),tTTR的值越小,表明车辆i以当前速度第一次到达车辆j风险域边界所需要的时间越短,即交通冲突越严重。将车辆i以当前相对速度在车辆j风险域内的行驶时间定义为tTIR(time in risk region),tTIR的值越大,表明车辆i在车辆j风险域内行驶的时间越长,即两车之间的交通冲突危险程度越高。
在平面直角坐标系中,根据车辆i的相对坐标以及相对速度可以计算出车辆i行驶时所在直线,通过车辆i所在直线与车辆j风险域的位置关系将后续的计算分成3类。
第一类是车辆i所在直线与车辆j风险域不存在交点,此时两车处于安全状态。将此状态下tTTR的取值设置为一个足够大的正数M,表示不会发生交通冲突,并将tTIR的取值设置为一个足够小的负数-M,即无需进行交通冲突风险程度判定。
第二类是车辆i所在直线与车辆j风险域存在一个交点。若则车辆i处于接近该交点的状态,车辆i所在位置与交点的距离为dDTR(distance to risk region)。通过dDTR计算对应的tTTR,如下所示:

此外,需要将tTIR的取值设置为一个足够小的负数-M。如果车辆i处于远离该交点的状态,则tTTR和tTIR的设置方法与第一类相同。
第三类是车辆i所在直线与车辆j风险域存在2个交点,此时车辆i与风险域的关系存在3种情况。第一种情况(见图2a),车辆i正在接近风险域,此时可以计算出对应的tTTR和tTIR。tTTR的计算式前文已经给出。将车辆i所在直线在车辆j风险域内的长度定义为dDIR(distance in risk region),则tTIR的计算式如下所示:

第三类的第二种情况,车辆i已经驶入车辆j风险域(见图2b),此时将tTTR的取值设置为一个足够大的正数M,tTIR为车辆i以当前速度驶离风险域所需要的时间。第三种情况车辆i正在远离车辆j风险域(见图2c),取值方法与第一类相同。

图2 车辆i与车辆j风险域的第三类位置关系Fig.2 Third type of positional relationship between vehicle i and risk region of vehicle j
除了以上3类相对运动状态以外,还存在一种特殊情况,即相对静止状态,此时不存在车辆i所在直线,仅计算车辆i与车辆j的相对距离,判断车辆i是否在风险域内。同时,不需要计算tTTR和tTIR。
tTTC的阈值常设定为1.5 s[22],考虑到本研究中的车辆存在风险域,随机选取3个轨迹记录,筛选出当tTTC处于1.49~1.51 s时对应的tTTR的值,对tTTR的值进行统计分析,以tTTR的50%分位数对应的值作为后续研究的阈值,即1.2 s。当tTTR≤1.2 s时,认为两车之间存在交通冲突,并且需要进行交通冲突危险程度的判定。
2.2 交通冲突危险程度判定
交通冲突危险程度判定的前提是两车之间存在交通冲突,因此当且仅当tTTR≤1.2 s时,才需要对tTIR进行分析。由于车辆存在危险域,当两车距离很近且车速差很小时可能会出现一车始终在另一车的风险域内且两车之间并不存在交通冲突的情况,因此需要对此类数据进行剔除。将处理后的tTIR数据进行统计分析,结果如图3所示。
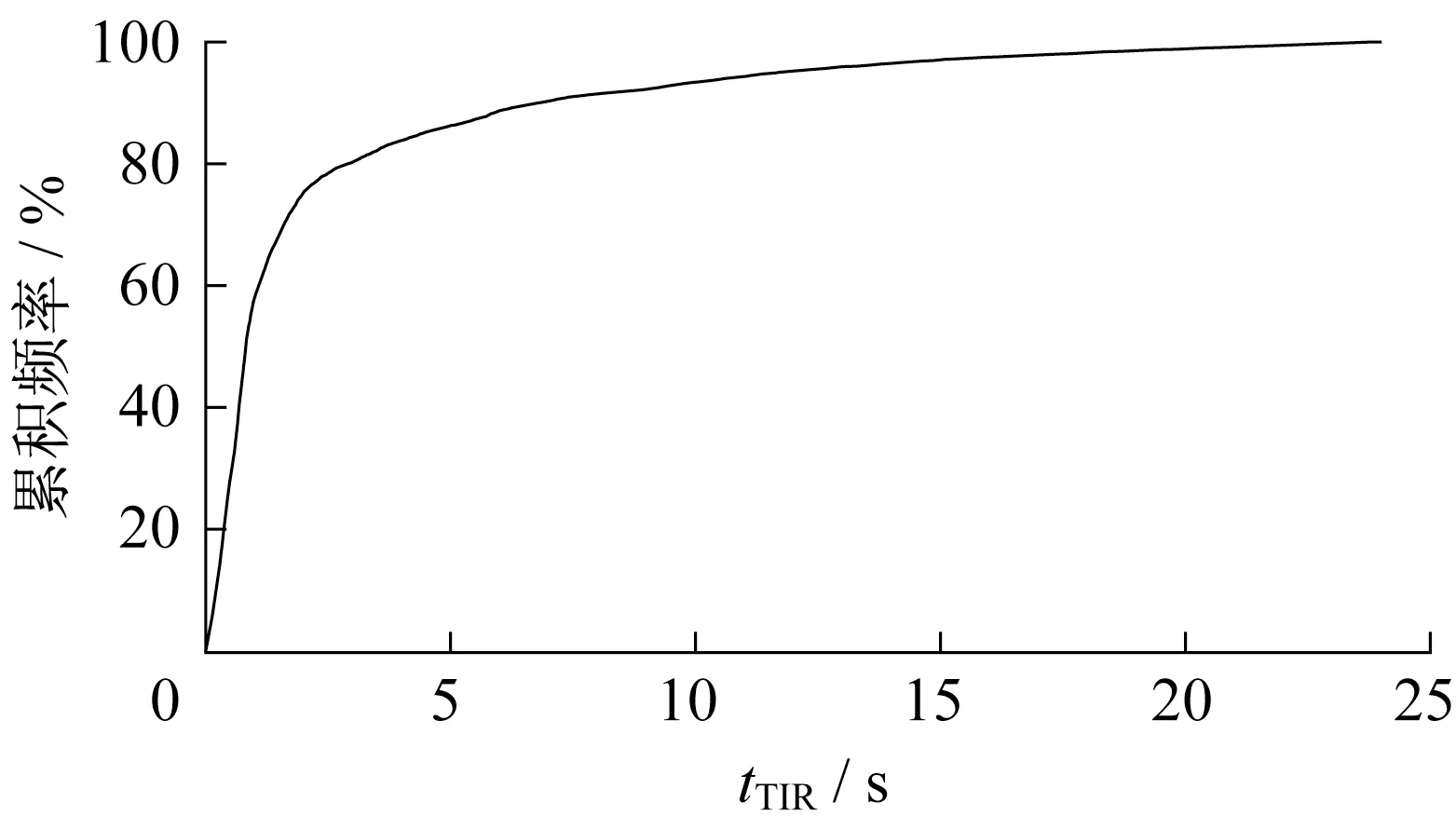
图3 t TIR累积频率Fig.3 Cumulative frequency of t TIR
由图3可知,tTIR的15%分位数位于0.30 s左右,tTIR的85%分位数位于4.30 s左右。通常选择15%和85%分位数作为划分数据的分界点,因此选择0.30 s和4.30 s作为风险程度划分的分界点,对tTIR进行风险评级。风险等级为Ⅰ级时风险最大,Ⅱ级其次,Ⅲ级最小,如表3所示。

表3 交通冲突风险等级划分Tab.3 Level of traffic conflict risks
3 交通冲突案例分析
计算每一时刻的tTTR和tTIR,根据设定的阈值识别交通冲突,并对交通冲突危险等级进行判定。为证明本研究的有效性,将本研究的计算指标与tTTC进行对比。tTTC是指当前时刻下若两车保持原有的速度和行驶轨迹,不采取任何避险行为,则两车会在未来的某一时刻发生碰撞,从当前时刻至发生碰撞的时刻所需的时间即为tTTC。tTTC是交通冲突识别中较为常用的指标,根据阈值来判定是否发生冲突,再选取发生冲突时间段内的最小tTTC为两车之间的tTTC,表征交通冲突的严重程度。用tTTC矢量算法计算tTTC,仅考虑两车之间的接近率,但不考虑接近率的变化率,参见文献[23]。需要说明的是,矢量算法中tTTC可能存在负值的情况,负值表示两车正在远离,即不会发生交通冲突。因此,若tTTC为负值,默认将其替换为足够大的正数M。关于tTTC阈值的选取,较为常用的是1.5 s[22]。
根据发生冲突时两车车头角度的不同将交通冲突分为追尾冲突、换道冲突和相交冲突3种类型,本研究中主要对追尾冲突和相交冲突进行分析。首先,根据tTTR的阈值筛选出存在交通冲突的车辆对,剔除不符合车速要求的车辆对,若车辆对中任一车辆在阈值内车速始终小于1.8 km·h-1,车辆几乎处于静止状态,则认为不存在冲突;其次,剔除始终并行的车辆以及车辆数大于两辆车的交通冲突。
3.1 交通冲突汇总
对12个轨迹记录文件中提取出的交通冲突进行汇总,发现相交冲突数量较多。通过tTTR和tTTC识别出的交通冲突数量如表4所示。

表4 交通冲突数量对比Tab.4 Comparison of the number of traffic conflicts
基于风险域的交通冲突分析分为2个部分。第一部分是采用tTTR进行交通冲突识别,当tTTR小于或等于阈值时,认为两车之间存在交通冲突;第二部分是采用tTIR进行交通冲突危险程度判定,当tTTR小于或等于阈值时,根据tTIR的值对两车之间的交通冲突进行风险等级划分。因此,在交通冲突识别时,仅涉及到tTTR一个指标,表4中的基于tTTR识别的交通冲突数量即为基于风险域识别的交通冲突数量。
tTTR和tTTC均是在每一帧基础上计算一个对应的值,2种冲突判别指标本质上均是指小于或等于阈值时认为两车之间存在交通冲突。不同之处在于:在交通冲突分析中tTTC会有一个最终取值,并且该最终取值选择了两车全过程中的最小值;在基于风险域的交通冲突分析方法中,tTTR作为一个判定是否存在交通冲突的指标,未必有一个最终的取值,因为tTTR最小值可能为零,并且为零的时刻不止一个时刻,所以无法准确表征两车之间的危险程度,当两车存在交通冲突时更多关注的是tTIR的值,即两车之间的风险程度。
从表4可以看出,2种方法识别所得的交通冲突数量并不相同。交通冲突识别重合数量是指某交通冲突被2种方法同时识别的交通冲突数量。通过视频验证,2种方法均不存在错误检测的情况,因此实际交通冲突数量的计算方式是根据交通冲突类型分别将基于tTTR识别的交通冲突数量和基于tTTC识别的交通冲突数量求并集。以相交冲突为例,实际交通冲突数量的计算方式是将2种方法识别的交通冲突数量分别与交通冲突识别重合数量相减,得到基于tTTR识别的交通冲突数量与交通冲突识别重合数量的差,即16次,以及基于tTTC识别的交通冲突数量与交通冲突识别重合数量的差,即13次,再将两者与交通冲突识别重合数量相加得到最终的实际交通冲突数量137次。根据实际交通冲突数量可以计算出2种交通冲突识别方法的识别率。
对于追尾冲突,基于tTTR的交通冲突识别方法具有显著优势;对于相交冲突,基于tTTR的交通冲突识别方法略好于基于tTTC的交通冲突识别方法。综上所述,基于tTTR的交通冲突识别方法比基于tTTC的交通冲突识别方法在追尾冲突和相交冲突的场景下具有更高的识别率,即优于传统的基于tTTC的交通冲突识别方法。以下将根据交通冲突的不同类型针对追尾冲突和相交冲突以案例形式进行分析。
3.2 追尾冲突
基于tTTR的交通冲突识别方法与基于tTTC的交通冲突识别方法在追尾冲突的识别数量上具有显著差异,为验证基于风险域方法的准确性,采用视频验证方法逐一进行判断。结果表明,几乎所有的情况都是tTTC漏判了追尾冲突。
以23轨迹记录中的车辆57和车辆58为例,如图4所示,两车均从进口道5驶入交叉口,车辆57为避免与车辆55发生碰撞而减速,进而导致车辆58发生减速行为。从第2 285帧开始tTTR小于1.2 s,两车开始发生交通冲突,直至第2 295帧结束。tTTC在全过程中均未小于1.5 s,即出现追尾冲突漏判情况。然后,根据tTIR对交通冲突的风险程度进行判定,在第2 285帧至第2 291帧时tTIR风险等级为Ⅱ级,随后风险等级增加到Ⅰ级,由于车辆及时采取了刹车制动行为,从第2 296帧开始两车不再存在交通冲突。
32轨迹记录中的车辆43和车辆44与上述情况类似,如图5所示,两车的行驶方向相同并在同一车道上,车辆43在转弯时减速,车辆44为避免发生碰撞,采取了刹车制动行为。从第2 353帧到第2 375帧tTTR均小于1.2 s,两车之间存在明显的追尾冲突,但是tTTC同样出现了交通冲突漏判情况。观察tTTR小于阈值时tTIR的值,除第2 374和第2 375帧时tTIR风险等级处于Ⅰ级外,其他时间风险等级均处于Ⅱ级。此外,在该情况下车辆44全程都没有侵入车辆43的风险域内,具体结果如表5所示。

图5 交叉口3追尾冲突分析案例Fig.5 Case of rear-end conflict at intersection 3
3.3 相交冲突
在所有的相交冲突中,基于风险域的交通冲突识别方法与基于tTTC的交通识别方法结果比较相近,少部分情况下基于tTTC的方法存在交通冲突漏判情况。
以07轨迹记录中的车辆17和车辆20为例,如图6所示,两车从第646帧开始同框,两车同框时计算所得的tTTC均不存在小于1.5 s的情况,最小值为2.37 s。然而,采用基于风险域的交通冲突识别方法,在第679帧时tTTR小于阈值,直至第794帧结束交通冲突。通过视频验证发现,两车均存在较为明显的刹车制动行为,因此认为确实存在相交冲突。对相交冲突进行风险程度划分,结果如表5所示。从发生冲突开始tTIR的值不断减小,起初两车的风险程度处于Ⅱ级,从第788帧开始两车的风险程度降低到Ⅲ级,直至冲突结束,车辆17在车辆20风险域内的实际行驶时间是78帧,即3.12 s。
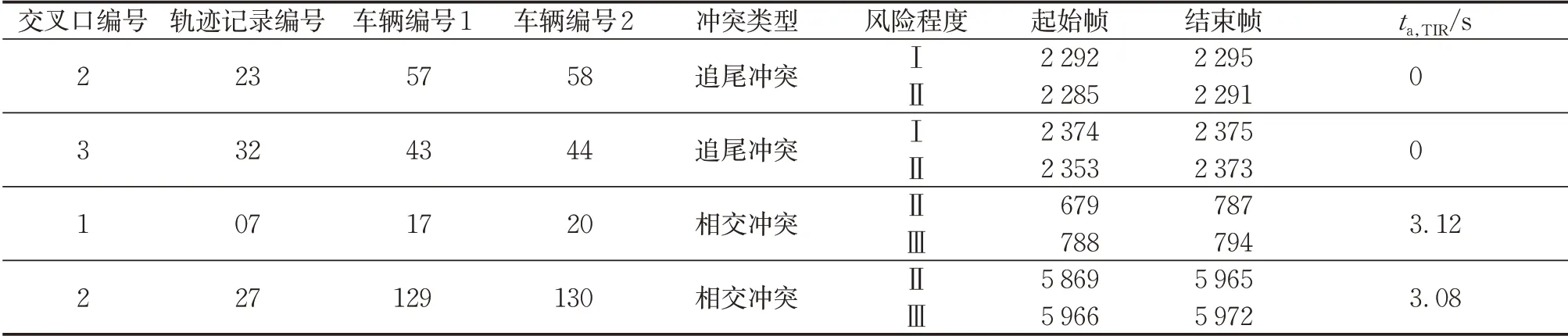
表5 交通冲突风险程度案例Tab.5 Case of traffic conflict risk degrees

图6 交叉口1相交冲突分析案例Fig.6 Case of crossing conflict at intersection 1
此外,以27轨迹记录中的车辆129和车辆130为例,如图7所示,tTTC始终大于1.5 s,即认为两车之间不存在相交冲突,但是从第5 866帧开始,车辆129和车辆130可以计算出对应的tTTR和tTIR,在第5 869帧时tTTR达到阈值,认为两车开始发生交通冲突,直至第5 972帧结束。通过视频验证,发现两车之间确实存在交通冲突,从进口道5驶入交叉口的直行车辆129为了避免与从进口道6驶入交叉口的车辆130发生碰撞,存在明显的减速行为。根据tTIR的变化情况,从冲突开始发生的时刻两车风险程度为Ⅱ级,车辆采取减速避让行为一段时间后,两车之间的风险程度降低到Ⅲ级,直至冲突结束。
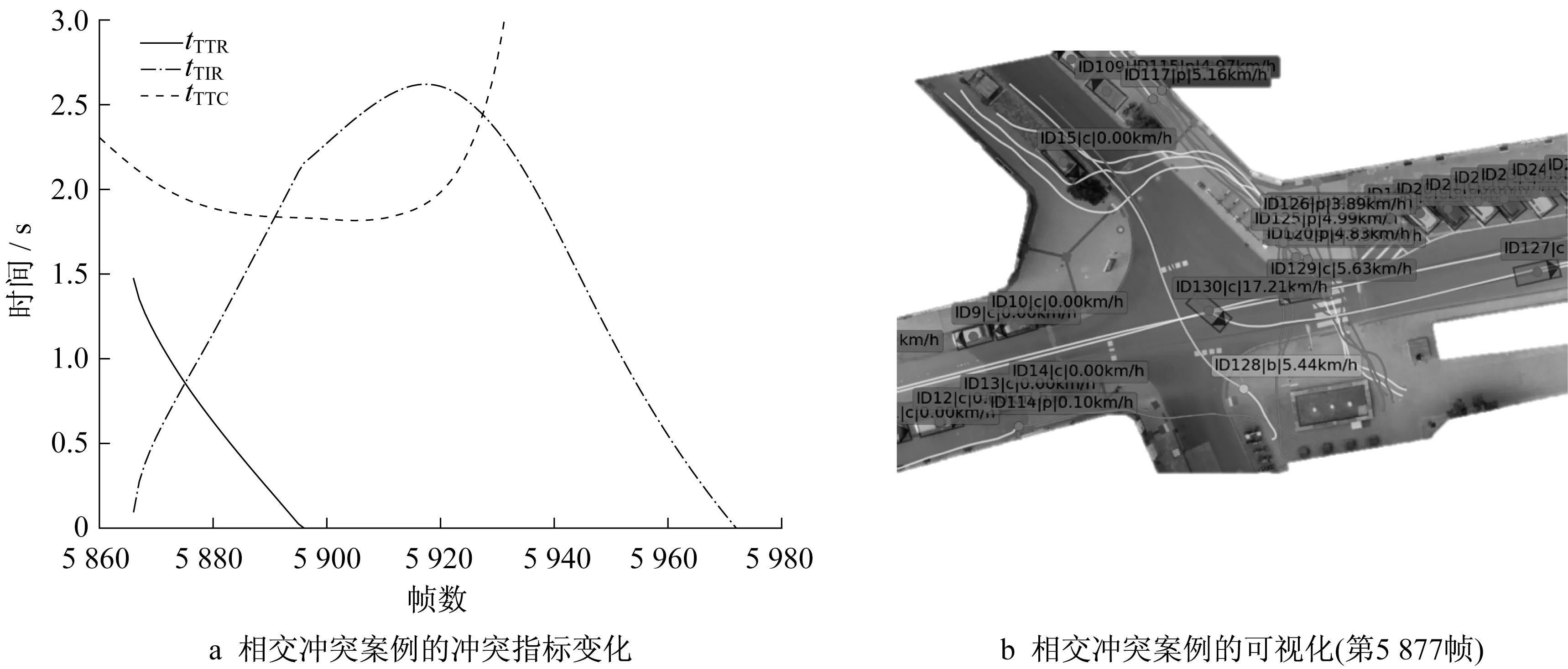
图7 交叉口2相交冲突分析案例Fig.7 Case of crossing conflict at intersection 2
4 结语
以往的研究侧重于交通冲突最严重的时刻,较少考虑车辆i暴露在车辆j周围的持续时间。本研究中假设车辆周围存在一定范围的风险域,计算每一时刻车辆i首次到达车辆j风险域边界所需的时间,并根据设定的阈值来识别交通冲突,同时考虑了车辆i在车辆j风险域内行驶所需的时间,并根据时间的长短来判定风险程度的大小。研究发现,风险域方法能够克服基于tTTC的交通冲突识别方法存在的对交通冲突的遗漏识别问题,在相交冲突和追尾冲突的识别上更具优势,尤其是对于追尾冲突,基于风险域的方法具有更高的识别准确性。以tTIR为基础进行风险程度划分,能够较好地表现出两车在发生交通冲突时不同时刻的交通冲突严重程度。本研究中仅考虑了小汽车之间的交通冲突,货车的车长远大于小汽车,目前的交通冲突识别与风险程度判定方法对货车并不完全适用,后续研究考虑将方法修改并推广至所有车辆类型。
作者贡献说明:
陆毅忱:数据分析,案例分析,论文撰写与修改。
邹亚杰:提供研究思路,指导论文撰写,论文审阅与定稿。
程 凯:数据分析,方法论的提出,论文结果讨论。
郑 来:指导论文撰写,论文结果讨论,论文审阅与定稿。
SELPISelpi:指导论文撰写,论文结果讨论,论文审阅与定稿。
朱 婷:方法论的提出,论文结果讨论,论文审阅与定稿。
