跟驰模型场景基准分析
2021-08-07李瑞杰李林波邹亚杰
李瑞杰,李林波,李 杨,邹亚杰
(同济大学道路与交通工程教育部重点实验室,上海 201804)
跟驰模型用于描述在无法超车的单一车道上,车辆列队行驶时处于跟驰状态的后车驾驶员行为,对交通安全、交通仿真、通行能力、自动驾驶等研究具有重要意义。自20世纪50年代首次被提出以来[1],基于不同建模理念的跟驰模型层出不穷,根据应用领域,大致可以划分为考虑人类因素、基础设施、交通信息以及异质交通流等各类跟驰模型[2]。由于建模理念的差异,因此不同跟驰模型的适用条件和性能也有所不同。在实际研究中,基准模型的选择往往偏于主观,而且人工驾驶模型由自然驾驶数据对所选基准模型的标定来确定,尽管这种确定性参数标定方法并没有反映出人工驾驶的随机特性,但在单一的驾驶环境下,也能在一定程度上反映人工驾驶的典型特征。自动驾驶出现后,人工驾驶与自动驾驶构成的异构主体交通流将会在一段较长的时间内存在,那么如何对自动驾驶与人工驾驶进行区别建模是异构主体交通流研究的关键,其中基准模型的选择就变得非常重要[3]。因此,各典型跟驰模型相互间进行横向比较与特性分析,对于模型的选择与应用具有重要参考价值。
四是搞好种子处理。选择优良种子,播前对种子进行包衣,这样可以有效避免鼠、兔、鸟等抢食飞播种子。包层要达到一定的厚度,厚度达到了,不仅为种子发芽后提供一定的营养,同时还使种子在雨量较小的情况下不发芽,避免发芽后高温天将幼苗烫死,只有达到一定的降雨量,种子才能发芽,并在土壤保持足够含水量的情况下顺利成长。另外,包衣后的种子即使当年由于降水少不能发芽,也有很多种子可以在第二年降雨量较好的情况下发芽。
当前跟驰模型评价方法主要分为3类:宏观基本图法、微观轨迹法以及场景测试法。宏观基本图法是指在只有线圈数据的情形下,对微观跟驰模型进行积分后形成宏观模型,并根据其与积聚的宏观交通流流密速三参数关系散点图的拟合程度来评价的方法[4]。由于宏观数据集的限制,该类方法存在以下不足:部分模型如身心模型的参数较多,无法积分为相应宏观模型;部分跟驰模型中的参数,如反应时间、敏感系数,没有对应的宏观交通流参数;驾驶员驾驶行为的异质性无法通过宏观交通流模型反映。微观轨迹法是指通过轨迹数据直接标定跟驰模型并比较模型对轨迹点的拟合程度来评价的方法。该方法通常包含以下步骤:数据集与性能指标的选取(车头间距、后车速度、加速度等)、目标函数的设计(均方误差、均方根百分比误差等)以及优化算法的构建。Ranjitkar等[5]通过GPS收集实车试验数据,标定8个跟驰模型,得到简单的线性模型性能要优于某些复杂模型的结论。Brockfeld等[6-7]的研究表明,参数最少的模型标定结果最好,并且平均误差不低于15%。Zhu等[8]采用上海市自然驾驶数据标定5个模型,其中IDM(intelligent driver model)具有较好表现。总体来看,关于微观轨迹法的研究虽然取得很多有意义的结论,但是由于性能指标、目标函数及优化算法的设计多样且复杂,对结果的影响仍不得而知。此外,轨迹数据集的完整性,即是否包含行驶过程中的各种工况,如自由流场景中的启动、加速及跟驰场景中的随前车的加减速、停车等,对模型标定也存在一定影响,但以往研究中所使用的轨迹数据大多没有完整的行驶工况[9]。与上述方法不同,场景测试法可人为设置各种典型驾驶工况,并通过可视化方式来直观展示模型在各工况中的表现。Olstam等[10]通过仿真场景构建,比较了4种交通仿真软件中的跟驰模型,但该研究选取的测试场景及模型均较为有限。
越来越多的证据表明,非编码RNA(non-coding RNA,ncRNAs)也参与染色质修饰和基因表达的表观遗传学调控[11-14]。ncRNAs能招募HDAC和其他表观遗传学调控相关蛋白质,并将其诱导至启动子区含同源基因座的相关位点,参与调控基因表达。此外,短链ncRNA[如微RNA(microRNA,miRNA)、干扰小RNAs]通过与相应信使RNA作用,可抑制HDAC和染色质修饰复合体元件的表达,为肿瘤的表观遗传学治疗提供了新的靶点,也为抗肿瘤药物的研制提供了有价值的方向。
为对已有跟驰模型进行较为全面的场景基准分析,首先按照不同建模机理选取各典型跟驰模型,然后设计包含各种驾驶工况的仿真场景,最后基于仿真场景对各典型跟驰模型进行逐个测试。
1 典型跟驰模型
1.1 典型跟驰模型选取
Brackstone等[11]在2000年首先发表了关于跟驰模型的综述论文,将已有跟驰模型分为GHR(Gazis-Herman-Rothery)模型、安全距离模型、线性模型、身心模型以及模糊逻辑模型。王殿海等[12]于2012年从交通工程角度和统计物理角度对跟驰模型进行分类,交通工程类模型包括刺激-反应类、安全距离类、心理-生理类及人工智能类模型,统计物理类模型包括优化速度模型、智能驾驶模型和元胞自动机模型。杨龙海等[2]则从解析角度将跟驰模型分为理论驱动与数据驱动2类。对于理论驱动类模型,除了传统建模机理外,还出现了一些新的建模理论,如弹簧车跟驰理论[13]、场论[4]等。Ni[14]按照跟驰模型输出的时间维度差异将模型分为3类:动态模型,以加速度作为模型输出,如GM(general-motors)模型、IDM等;稳态模型,以速度作为模型输出,如Pipes模型、Gipps模型等;静态模型,以位移作为模型输出,如Newell的简化跟驰模型等。
基础层和传输层信息经济发展薄弱的省份应大力夯实信息经济发展基础,从而推动其他层信息经济的发展。通过落实招商引资政策,大力发展电子信息制造业和软件技术服务业,为公众使用互联网提供可得性和便利性。推进地方性项目工程发展,如企业信息化服务平台、制造业信息技术集成应用、先进工艺流程信息化等建设内容,实现“两化” 深度融合的快速发展,并推动电子商务基础设施改造升级,积极推动省级电子商务示范城市建设,探索农村电子商务试点工作,为信息经济新兴业态的孕育与发展奠定良好基础。
基于人工智能方法的数据驱动类模型所具有的参数众多,并且不具有解析性,不利于模型的发展,因此在典型跟驰模型选择时仅考虑理论驱动类模型。模型的每次输出决定了下一驾驶状态的更新方式,对模型结果造成一定影响。因此,考虑模型的输出形式与应用广泛性,从交通工程角度与统计物理视角出发,最终选取7种典型跟驰模型(见表1)。

表1 跟驰模型选取和参数的选取Tab.1 Selection of car-following models and parameters
MITSIM(microscopic traffic simulator)、Gipps模型、Wiedemann 99模型(下文简称为Wiedemann模型)为交通工程角度下的典型代表,FVD(full velocity difference)模型、IDM、S-K模型为统计物理角度下的典型代表,而LCM(longitudinal control model)为依据场论而构建的模型。模型所采用的参数均为模型原始参数或快速路跟驰数据所标定的参数。需要说明的是,虽然不同模型间的某些参数具有相同的意义,如反应时间、期望速度等,但不同模型中其值可能会不同,原因在于模型的一套参数集是整体优化后的结果,该参数仅为模型中参数集的一环,其值将受本模型其他参数的影响[8]。
1.2 典型跟驰模型介绍
跟驰过程中动态参数如图1所示。
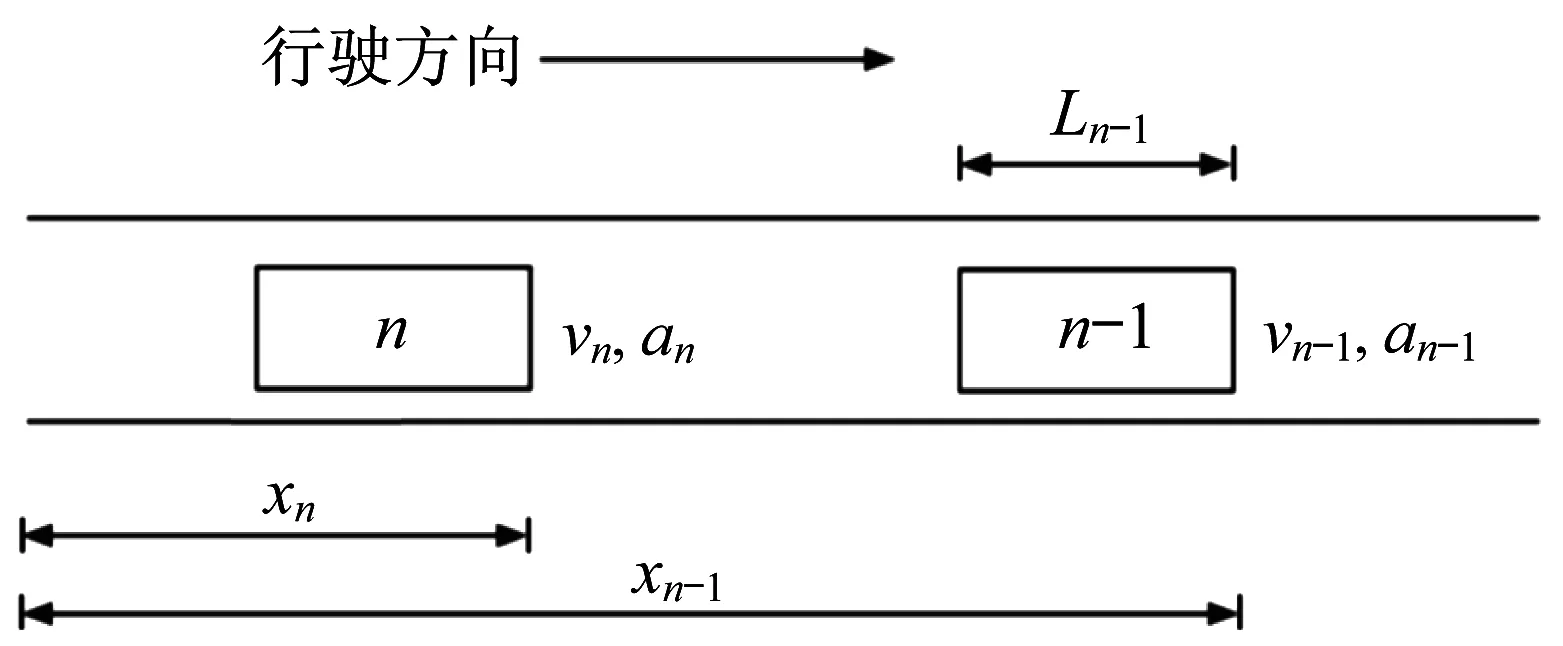
图1 跟驰行为符号表示Fig.1 Symbolic representation of car-following behavior
本节中部分变量的定义如下:(n-1)为跟驰过程中的前车,n为跟驰过程中的本车,an(t)为t时刻车辆n的加速度,an-1(t)为t时刻车辆(n-1)的加速度,vn(t)为t时刻车辆n的速度,xn(t)为t时刻车辆n的位置,Ln-1为车辆(n-1)的车长,τn为车辆n的反应时间,Δxn(t)=xn-1(t)-xn(t)为t时刻前后两车的车头间距,Δvn(t)=vn-1(t)-vn(t)为t时刻前后两车的速度差,vd,n为车辆n的期望速度,amax,n为车辆n的最大加速度,为车辆n的减速度。
1.2.1 MITSIM
GHR模型是典型的刺激-反应类模型,但GHR模型无法自动启动。MITSIM[16]对GHR模型进行改进,融入3种不同驾驶情形,即自由流情形、紧急减速情形以及跟驰情形。3种情形中本车加速度计算式分别如下所示:
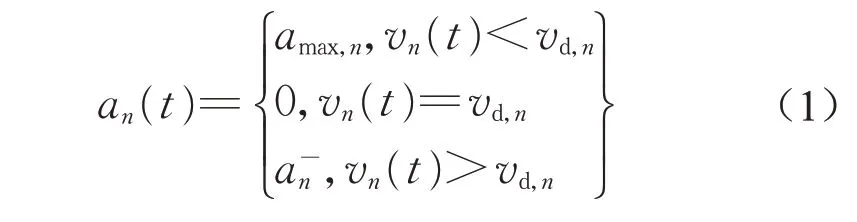

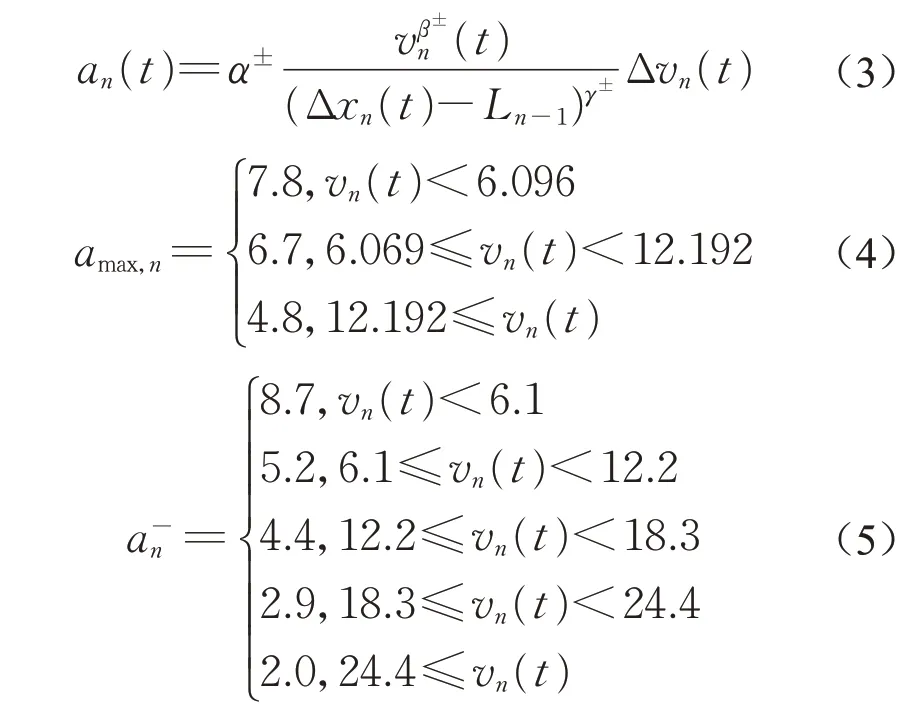
式中:α±、β±以及γ±为敏感系数。具体公式的选取是由实际车头时距与车头时距阈值hu和hl间大小关系确定。若实际车头时距大于hu,则本车加减速不受前车影响,而是取决于本车当前车速与期望车速的大小关系(见式(1)),最大加速度amax,n以及减速度a-n的取值随本车当前速度的变化而变化(见式(4)和式(5));当实际车头时距小于hl,本车则会采取紧急制动以防止发生碰撞(见式(2));当实际车头时距介于hu与hl之间,本车则由非对称GHR模型控制(见式(3))。当前车速度大于本车速度时,使用α+、β+、γ+这一组参数;当前车速度小于等于本车速度时,使用α-、β-、γ-这一组参数。
勾股定理是几何学中的明珠,它是联系数与形的第一定理,它推动了数学的发展,在几何学中有非常广泛的应用.微课程介绍历史上中西方发现勾股定理的故事,传递中国古代数学家们对于勾股定理的发现在世界数学史上的独特的贡献和地位,激发民族自豪感和学习兴趣.
Nagel等[22]首次基于随机离散元胞自动机对快速道路的交通流情形进行建模,道路被离散成固定宽度的单元,在每个时间步长,模型都会更新4个步骤。由于此模型的离散表达式难以反映实际交通流特征,同时模型也难以用实际的数据进行标定,因此Krauss等[23-24]相继提出了Nagel-Schreckenberg模型以及S-K模型,其中最为著名的为S-K模型。S-K模型的表达式如下所示:
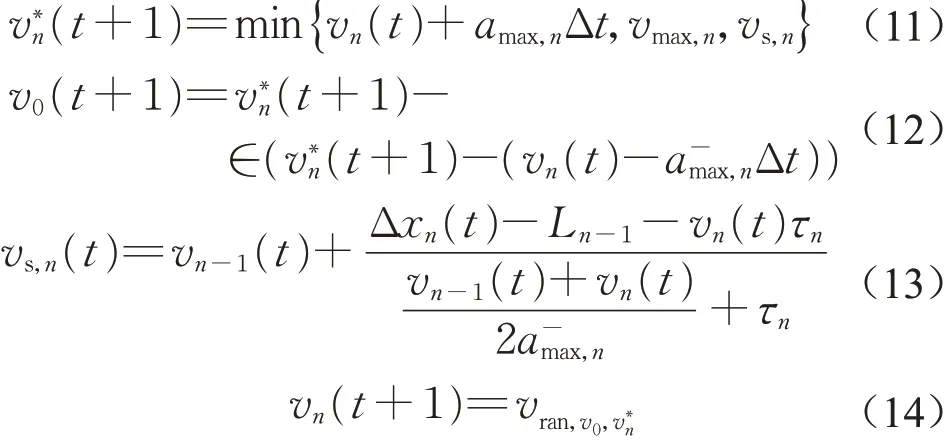
Gipps模型[17]包括自由流行驶以及跟驰行驶2种模式。当在自由流行驶时,车辆行驶速度由期望速度以及最大加速度决定;当在跟驰状态时,则通过安全车距约束。由于模型具有明确的物理意义,因此许多著名的仿真软件均采用类似的安全距离模型作为其核心模型,如CORSIM(corridor simulation)模型、AIMSUN(advanced interactive microscopic simulator for urban and non-urban networks),计算式如下所示:
在公文语体中,要求修辞语义必须是准确严谨的。公文语体规约着修辞主体使用准确的修辞语义,要求在公文语体中修辞语义的表达是准确的单一的,不存在歧义,不是模糊的意义,不能有多解的可能性。这就要求公文语体用词甚至用字都必须认真思考,慎重选择,多使用单义词,少选用多义词;在句子表意方面,也要做到严谨周密,不留无限遐想的语义空间;在辞格方面,尽量不用修辞格式,尤其不能使用具有浓重描绘色彩、情感色彩的修辞格式。例如:

1.2.3 Wiedemann模型
Wiedemann 74与Wiedemann 99是身心模型的典型代表,由于Wiedemann 99更适合于快速路跟驰建模[8],因此本研究中采用该模型。基于驾驶人感知阈值,将跟驰状态划分为4个部分:自由流行驶状态,即本车按照期望速度行驶;缓慢接近前车状态;稳态跟驰状态,即本车试图与前车保持相同的车速;紧急制动状态,即本车需减速来避免碰撞。在这4种情形中模型周而复始地更换跟驰策略,并在不同跟驰策略下采用不同加速度计算公式,囿于篇幅所限,详细的计算过程见文献[8]。
2017年四川省高职单招数学试卷充分渗透了优秀传统文化,体现了立德树人的要求.试题在应用创新,能力考查方面进行了积极有效的探索,突出对实践能力的考查,对中学数学教学有着较好的引导作用.
1.2.4 FVD模型
最优速度模型(optimal velocity model,OVM)最早由Bando等[18]提出,假设行驶的每一辆车都有一个最佳车速,而这个最佳车速依赖于本车与前车之间的距离,并且可以由本车实际速度与理想车速之差求得本车的加速度。然而,由于OVM会产生异常的减速度,因此Helbing等[19]考虑了负速度差的影响后提出了广义力模型。Jiang等[20]更为全面地考虑了正速度差的影响,从而提出了FVD模型,计算式如下所示:
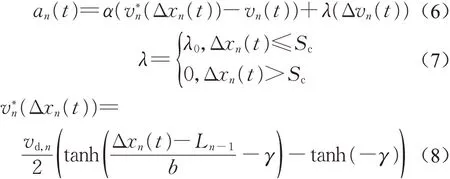
式中:α和λ为敏感系数;v*n为当前工况下最优速度;b、γ、λ0为常量参数;Sc为最大跟驰间距。
IDM作为当今最受欢迎的模型之一,于2000年由Treiber等[21]提出,表达式如下所示:
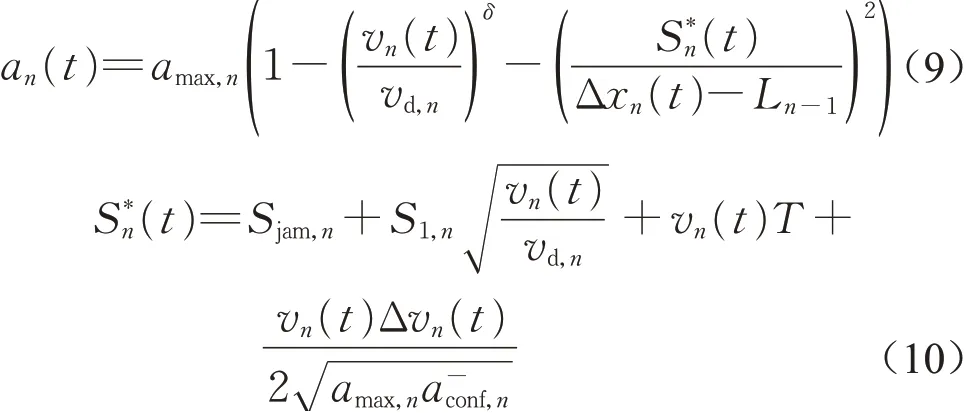
式中:δ为加速度系数;S*n(t)为期望间距;T为安全车头时距为阻塞车间距;S1,n为停止车间距。
1.2.6 S-K模型
闪电劈开雷雨交加的黑夜,瞬间照亮站在铁轨中间的杨秉奎。他左右摆动着手中的信号灯。一列封闭的货车缓缓驶来,车灯橘黄色的光透过密集的雨点,照在杨秉奎身上。
1.2.2 Gipps模型
自由流场景主要用于测试各跟驰模型在没有前车影响下的表现,包含SU、FA以及CDS 3个工况。由于MITSIM没有相应参数值,因此设定该模型的期望车速为25 m·s-1。为启动模型计算,同时排除前车干扰,设定初始条件下前车静止于本车1×105m前,用以模拟本车自由流情形。
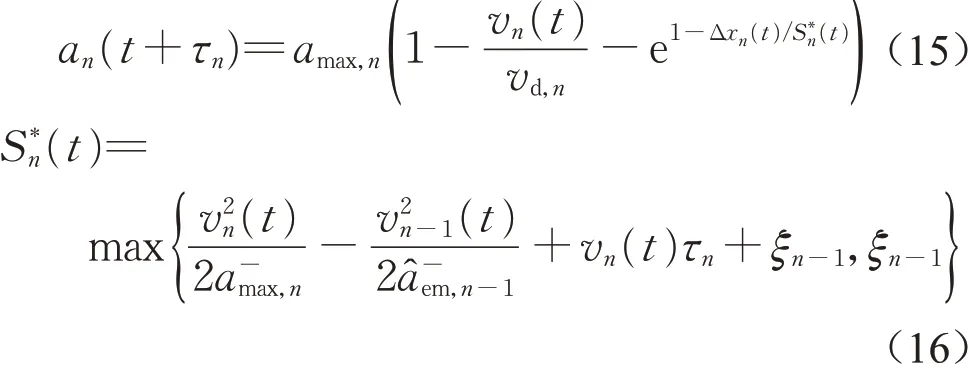
LCM由Ni等[4]基于场论而构建,目前用于微观交通仿真软件TransModeler中。将车辆n中驾驶员感知的环境(如道路和其他车辆)看作一个场Un,驾驶员在其中行驶会受到场的作用力,这些力包括驾驶人心理上想要到达目的地的驱动力Gn、道路阻力Rn和其他车辆对车辆n的作用力Pn[25],因而驾驶员的响应就可以表达为作用于其的净作用力。加速度计算式如下所示:
1.2.5 IDM
各模型参数取值如表2所示。
2 驾驶场景设计
Treiber等[26]将一个完整的轨迹数据分为如下6个工况:自由流加速(free acceleration,FA)、期望速度巡航(cruising at the desired speed,CDS)、跟驰定速行驶(following the leader at a constant speed,FLC)、跟驰前车加速(accelerating behind a leader,AL)、跟驰前车减速(decelerating behind a leader,DL)、跟驰停车(standing behind a leader,SL)。同时,静止启动(start-up,SU)也是实际驾驶中的一种工况。设计2种典型场景,即自由流场景以及跟驰场景,将2种场景下上述7种工况(见表3)作为各模型测试内容。
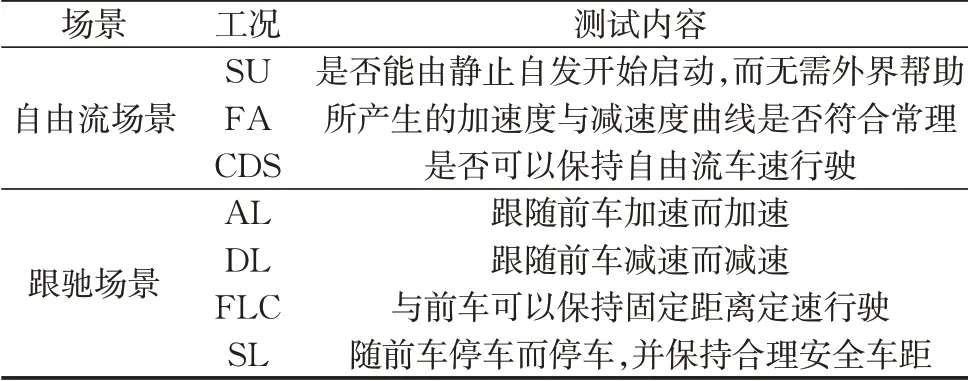
表3 纵向驾驶场景设计Tab.3 Longitudinal driving scenario design
1.2.7 LCM
跟驰场景设计如下:初始状态前后两车速度均为20 m·s-1,车头间距为100 m,之后,前车依次以20 m·s-1匀速行驶36 s,以3 m·s-2加速4 s,达到32 m·s-1后匀速行驶30 s,在第70 s以4 m·s-2的减速度减速2 s,之后保持24 m·s-1匀速行驶20 s,在第92 s,以3 m·s-2的减速度减速,直到第100 s时停止,位置为2 516 m。整个过程完整包含了AL(36~40 s)、DL(70~72 s,92~100 s)、FLC(0~36 s,40~70 s,72~92 s)以及SL(>100 s)4个工况。
跟驰场景主要用于测试本车的跟驰性能。对于车辆跟驰场景的设计,首先需要明确跟驰行为状态。已有文献主要从本车是否达到期望车速、车头间距、车头时距等多个方面对跟驰状态进行判定,但仍没有统一结论。为确保所设计的场景满足跟驰行为要求,设计场景时同时兼顾如下准则:本车在前车影响下未达到期望速度行驶[27]、车头时距小于5 s[28]、车头间距小于120 m[8]。
跟驰场景中,若本车速度以及加速度绝对值逐渐趋于零,并且不出现如下情况则可认为满足安全停车工况:本车过大的加速度或减速度;本车速度持续出现较大负值(排除因为模型振荡导致速度为负);本车位移超过前车或与前车无法保持最小安全车头间距。
3 典型跟驰模型基准分析
典型跟驰模型在每个场景中的比较内容包括本车速度、本车加速度以及与前车的车头间距变化,具体来说,就是分析变化的趋势、幅度、时刻以及时隙长短。
方法3:蒸发鉴别法。取一干净、干燥的玻璃片,然后分别在不同位置滴等量水样,待其完全蒸发后,白色残留物多的水样为硬水,反之为软水。
3.1 自由流场景基准测试
自由流场景下模型将依次经历SU、FA、CDS 3个工况。区分FA与CDS工况的时刻在于,若速度均值在连续5 s内保持不变,则认定进入CDS工况。各模型在自由流场景下的加速度、速度表现如图2所示。
从图2可以看出,在SU工况下各模型均可不受前车干扰,自行启动。
ab换相和bc换相的原理与ca换相相同。由此可以求得各实际触发角。若交流系统短路比足够大或者备有交流滤波器,三次谐波含量较少时,可以忽略其对换相线电压过零点偏移的影响。
从表4可以看出,在FA工况下各模型加速时长差异很大,最短的Wiedemann模型仅需3 s,最长的IDM则需59 s,而Gipps模型、S-K模型以及LCM加速时长约为24~25 s。显然,Gipps模型、S-K模型和LCM的加速时长更符合实际。对图2b进一步分析,S-K模型加速度从0~25 s一直保持在1~2 m·s-2行驶,Gipps模型大约经过6 s才到达最大加速度,LCM在2 s内便达到最大加速度。
对于各模型在CDS工况下的表现,结合表4和图2可以看出,Gipps模型、Wiedemann模型、IDM、LCM可以按照期望速度定速巡航。S-K模型速度会在期望速度附近小幅振荡,原因在于其实时速度会按一定的随机值偏离期望速度。MITSIM则在自由流场景下速度不断振荡,原因在于加速度在amax,n与a-n之间不断变化(见式(1)),速度维持在某一区间。一个有趣的发现是,FVD模型在自由流场景下不会按照模型设定的期望速度行驶,而是按照当前场景下的最优速度定速循环,原因在于最终决定其加速度变化的是最优速度,而不是期望速度。

表4 加速时长及相应巡航速度Tab.4 Duration of acceleration and corresponding cruising speed
基于以上描述,并结合实际驾驶经验,可得LCM在加速工况下的表现更符合认知;除MITSIM外,其余模型均可保持某值附近定速巡航。
3.2 跟驰场景基准测试
在跟驰场景下,依据前车的行驶状态,本车将依次经历FLC、AL、DL以及SL 4个工况。各模型的加速度、速度、位移以及车头间距的变化如图3~6所示。
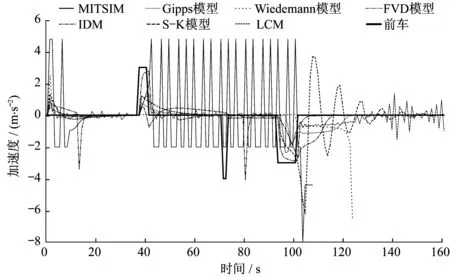
图3 各模型跟驰场景下加速度Fig.3 Acceleration of each model in car-following scenario
对图5以及图6进行分析,发现MITSIM以及Wiedemann模型无法完成SL工况,这是因为MITSIM以及Wiedemann模型分别在104 s以及124 s时车头间距变为负数,会与前车发生碰撞,故仿真停止。其余5个模型均可以顺利完成跟驰场景中的4个工况。从图4可以看出,在0~15 s时各模型均处于加速过程,而LCM速度变化最光滑。由图6可知,在第36 s时,前车开始加速过程,两车车头间距变化率在短暂延迟后不断变大,之后前车经过定速行驶(40~70 s)以及减速行驶(70~72 s),除Wiedemann模型外,其余6个模型车头间距均在72 s达到极值,其中FVD模型具有最小的车头间距,IDM具有最大的车头间距;前车在70~72 s减速后,FVD模型、IDM以及LCM车头间距变化率较大,表明这3个模型对前车减速反应较为敏感。
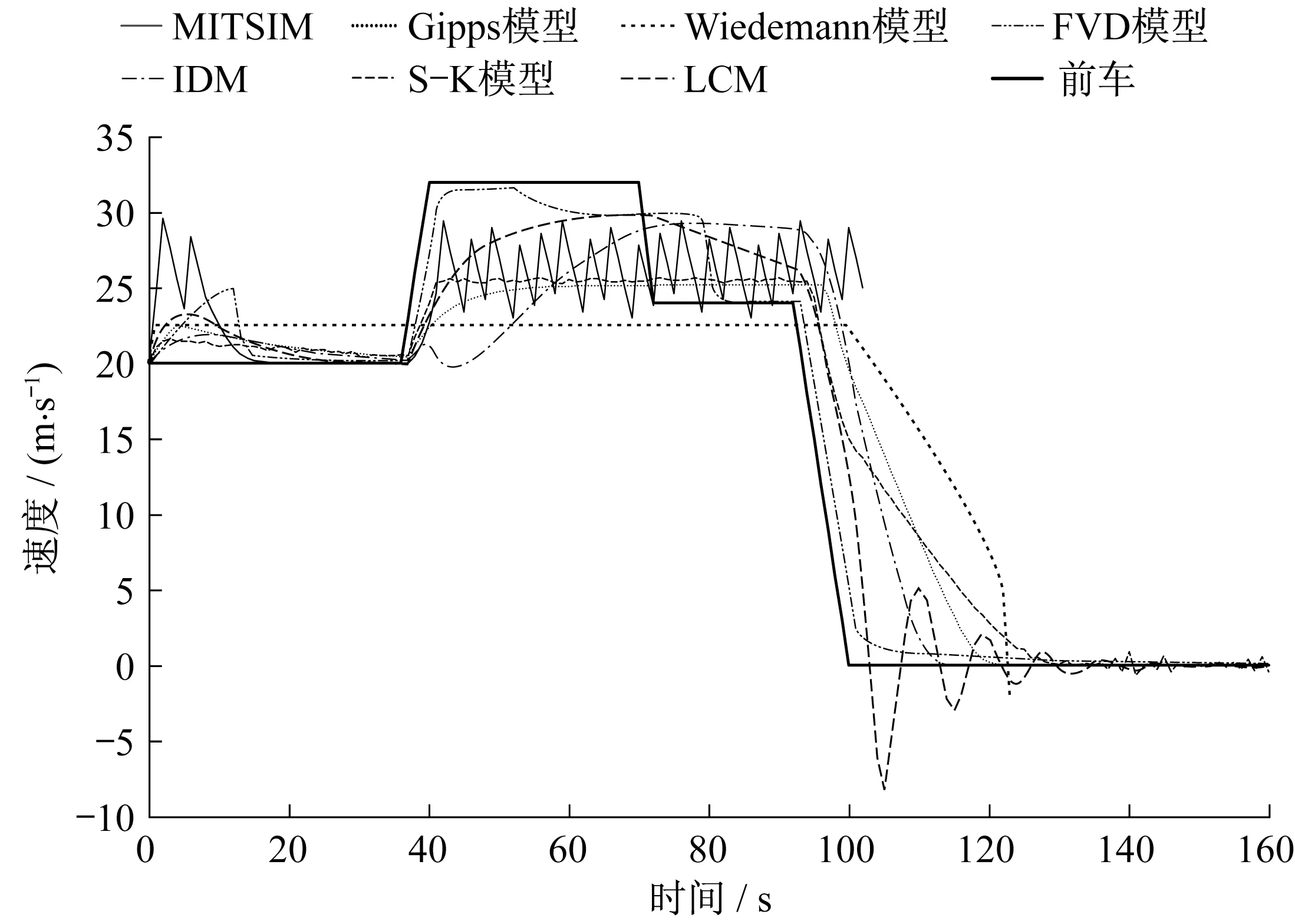
图4 各模型跟驰场景下速度Fig.4 Speed of each model in car-following scenario
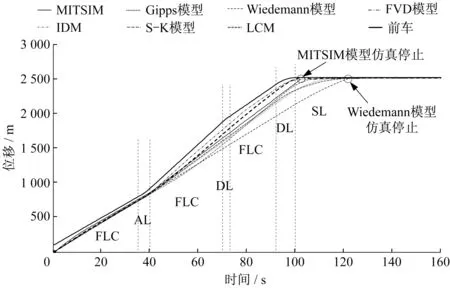
图5 各模型跟驰场景下位移Fig.5 Displacement of each model in car-following scenario
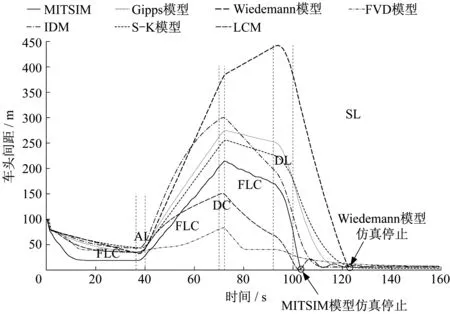
图6 各模型跟驰场景下车头间距Fig.6 Distance headway of each model in car-following scenario
为方便观测与分析,对各模型加速度及速度变化曲线进行单独表示并进行具体分析。
由图7可知:当前车速度小于本车期望速度时,本车能够自动减速并保持与前车一样速度进行跟驰(17~37 s),但当前车速度大于本车期望速度时,MITSIM将进入自由流状态,并出现振荡状态(40~70 s),无法随前车停车而安全停车,原因在于该模型最大加速度与hu、hl存在矛盾。具体来说,由于hu过小,本车速度较快情况下,减速度绝对值也较小,在前车快速减速过程中,本车在模型控制下仍长时间在自由流状态下行驶,因此会产生碰撞。解决方法是将hu、hl设置为较大一点的值,如分别设置为5和3,则可以取得较好效果。
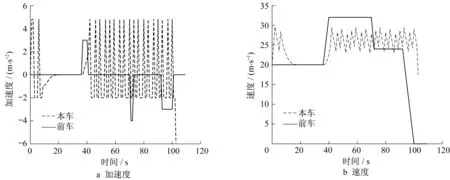
图7 MITSIM跟驰场景测试结果Fig.7 Test results of car-following scenario for MITSIM
Gipps模型、FVD模型及IDM的变化规律分别如图8~10所示。可以看出,Gipps模型中约在120 s本车速度与加速度均趋于零,最终本车将停止于2 510.38 m,与前车保持一个有效车长距离;FVD模型中速度变化在100 s出现拐点,逐渐趋近于零,最终本车停止于2 511.00 m处,与前车保持一个有效车长距离;在114 s时,IDM中速度与加速度均趋近于零,最终本车停止于2 509.00 m处,与前车保持7 m车头间距。
Gipps模型、FVD模型和IDM均可安全跟随前车加速、减速、定速行驶以及停车,但从图8~10中本车对前车加速度以及速度曲线的贴合程度来看,FVD模型中本车与前车动作保持很高的相似性,对于前车状态的变化,可以更加及时且有效地反应。
过程控制系统不仅要满足输出值跟踪给定的期望值,而且要保证控制器的输出平稳。因此,算法的优化性能指标可用式(4)表示:
杜先生也好,山田先生也罢,乃至许多给了我教益但不能一一列举者,他们与我在专业上并无密切联系.但所谓良师之益,从举止言谈到为人处世,实在是多方面的;甚至他们的缺点与由此造成的某种失败,不也同样值得学习与思考吗?此为,益友(古人定义:友直、友谅、友多闻,是为益友)也是良师;书籍更是如此;而一个成功者的启蒙良师与生活益友又或许正是他的慈母严父.总之,善于学习,则良师无处不在;“处处留心皆学问”乃研究者必备的素质.
图8 Gipps模型跟驰场景测试结果Fig.8 Test results of car-following scenario for Gipps model
图9 FVD模型跟驰场景测试结果Fig.9 Test results of car-following scenario for FVD model
图10 IDM跟驰场景测试结果Fig.10 Test results of car-following scenario for IDM
从图11可以看出,由于本车在120 s后速度持续为负值,因此模型完全无法完成停车工况。此外,该参数集下的Wiedemann模型对跟驰场景中的其余工况也没有较好表现。
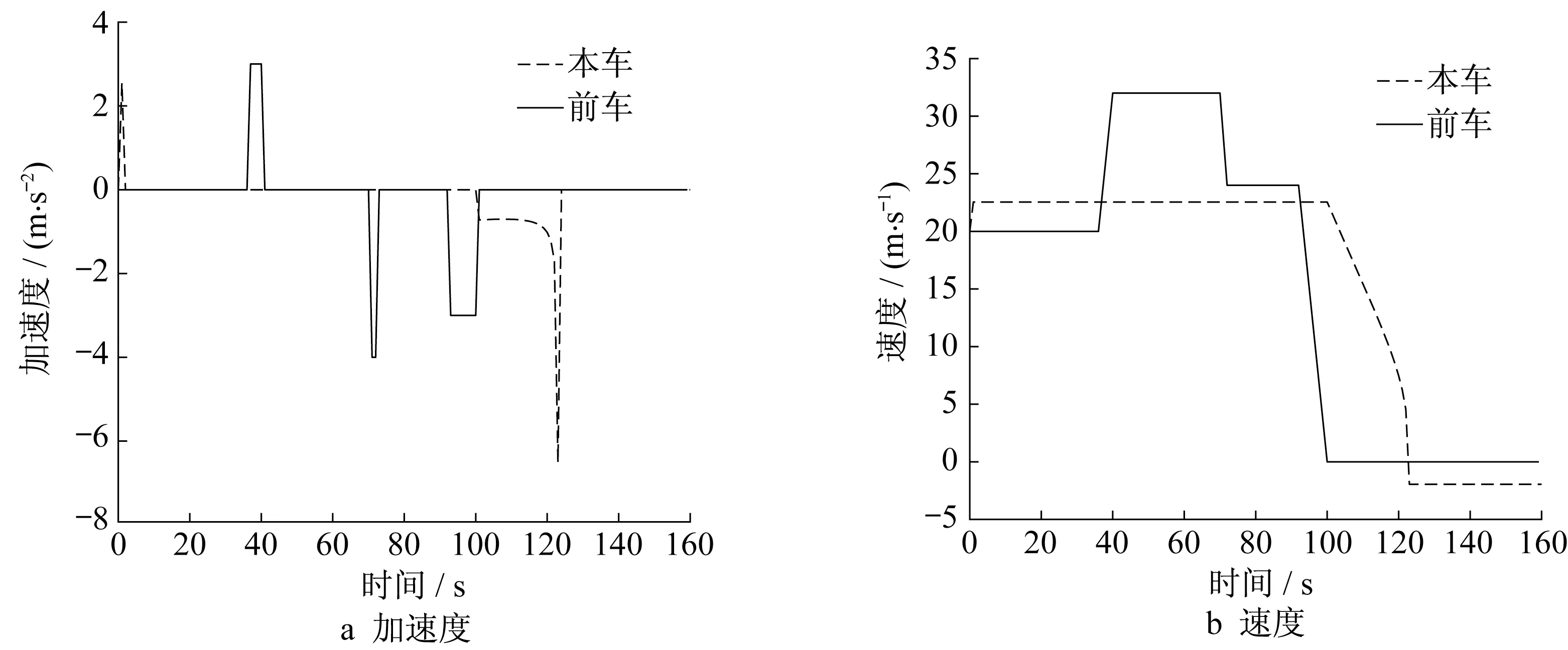
图11 Wiedemann模型跟驰场景测试结果Fig.11 Test results of car-following scenario for Wiedemann model
图12为S-K模型跟驰场景测试结果。结果表明,模型可完成加速、减速、定速行驶工况,但停车工况下存在一定振幅的随机振荡,最终本车于2 512.00 m处停止。在整个过程中加速度以及速度不断小幅振荡,可以由S-K模型的固有性质,即存在随机变化函数来解释。

图12 S-K模型跟驰场景测试结果Fig.12 Test results of car-following scenario for S-K model
图13 为LCM跟驰场景测试结果。结果表明,模型可完成加速、减速、定速行驶工况,但从约100 s开始,在跟驰停车工况下速度和加速度出现减幅振荡现象。初始时刻,由于振荡幅度加大,因此速度出现较大负值;当速度与加速度均趋近于零时,本车将停止于2 508.50 m,与前车车头间距为7.5 m,大于有效车长。
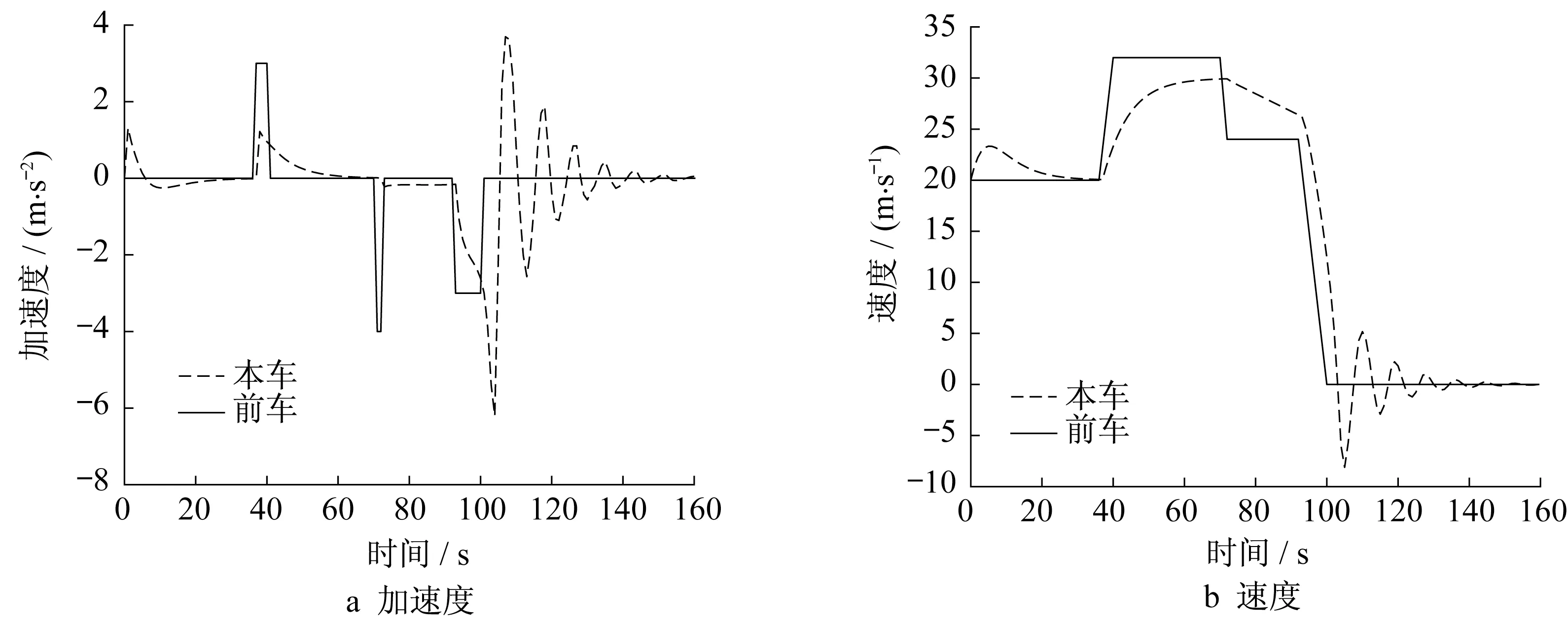
图13 LCM跟驰场景测试结果Fig.13 Test results of car-following scenario for LCM
总体而言,在跟驰场景下,MITSIM以及Wiedemann模型在跟驰停车工况下会出现碰撞,LCM与S-K模型在停车工况下将出现不同类型的振荡现象;Gipps模型、FVD模型以及IDM在跟驰场景的各工况下均可顺利运行,FVD模型与其余2个相比,对前车的跟驰反应最灵敏。
这些还只是形式上的,内容上二者也有相当大的差异。关于二者内容上的不同,古人多有论述,观点也不尽相同。流传最广,为多数诗词受众认同的是“诗庄词媚”这一说法。虽然王国维在《人间词话》中也说过“诗之境阔,词之言长”,但毕竟失之于抽象,好的诗都“言长”,好的词也都“境阔”。
4 结语
在梳理并总结当前不同跟驰建模机理情况下,选取了7个具有代表性的跟驰模型,并设定包含各工况的自由流场景以及跟驰场景,对不同模型在各场景中的运行表现进行测试。在自由流场景下,LCM在各工况下表现更符合认知,而其余模型在加速时长、加速度变化趋势方面与实际情况存在较大差异。在跟驰场景下,FVD模型具有最好的综合表现。综合2个场景来看,没有一个模型可以在各工况中均具有最好的表现。模型的表现能力并不仅仅取决于特定数据集拟合程度的好坏,更在于模型对各工况的响应程度。与其余模型不同的是,由于SK模型具有独特的内在性质,因此在自由流场景以及跟驰场景中速度与加速度始终处于微小振荡,这也较为符合实际驾驶情景。因为在实际驾驶过程中,驾驶员难以始终保持某一期望速度行驶,所以这一特性为模拟驾驶员行为不确定性提供了新的视角。其余模型如IDM、LCM、FVD模型、Gipps模型能够生成恒定的加速度,因此可用于异构交通流中自动驾驶车辆行为的模拟。
值得一提的是,IDM是目前交通流领域内被学者应用最广泛的模型之一,但IDM在一些工况下,尤其是自由流场景工况下,存在加速幅度较小的问题,在跟驰场景下对前车状态的变化反应较为迟缓且持久。Wiedemann模型被应用于著名的交通仿真软件Vissim中,但是在本研究中,该模型甚至无法完成自动停车工况,而在其余工况中,表现也与其余模型有较为明显的差异。这是由于Wiedemann模型存在许多无法解析的变量,因此造成此现象的原因还有待进一步分析。
不同模型在不同场景工况下表现存在差异,缺乏完整驾驶场景下的跟驰轨迹数据,是本研究没有对所选各模型进行重新标定的主要原因。对于各模型所选取的参数集,标定方法与所用数据并不完全相同,这也是模型产生不同表现的原因之一。下一步可对同一模型的不同参数集进行横向比较,探究参数不同取值对模型在不同驾驶工况下性能产生的影响。
作者贡献说明:
2.2.2 混合对照品溶液的制备 精密称取龙脑对照品、水杨酸甲酯对照品各适量,加乙酸乙酯溶解,制成含龙脑、水杨酸甲酯质量浓度均为0.1 mg/mL的混合对照品溶液。
李瑞杰:实验设计,结果分析及初稿撰写。
李林波:相关概念及方案讨论,论文语言组织。
李 杨:概念讨论与模型收集。
邹亚杰:论文审阅,结果分析及建议。
