掘进机横向和纵向随机振动响应分析
2021-08-02*武杰
*武 杰
(山西汾西瑞泰正中煤业有限公司 山西 031400)
1.引言
由于在纵向巷道掘进机的切割过程中,截齿和截割头的工作区域不断变化,因此,煤和石料的储存条件既困难又容易改变。头部切割的物理机械性能以及不可预测的随机激励是导致各部位产生振动,影响了掘进机的稳定和可靠性。
2.掘进机动力学模型
(1)假设与简化
在满足精度的基本要求的基础上,应根据实际设计和操作条件做出合理的假设并进行简化。主要假设如下:①掘进机所有部件的质量均相同,并且头部、控制台和车身的切割质量分别为m1、m2和m3。②煤的单轴抗压强度是恒定的;③连接范围变化很小,每个部分都视为未连接,阻尼为粘性阻尼,其中k1、k2和k3为刀头和刀臂以及刀体,刀体与底板之间的刚度,刀头和刀片。控制台和机身之间的水分以及机身和底板之间的水分分别称为c1、c2和c3。
(2)运动微分方程的建立
与高度,简化的纵向方向(z方向)和纵向方向(y方向)的假设一致,系统的动力学模型如图1所示。
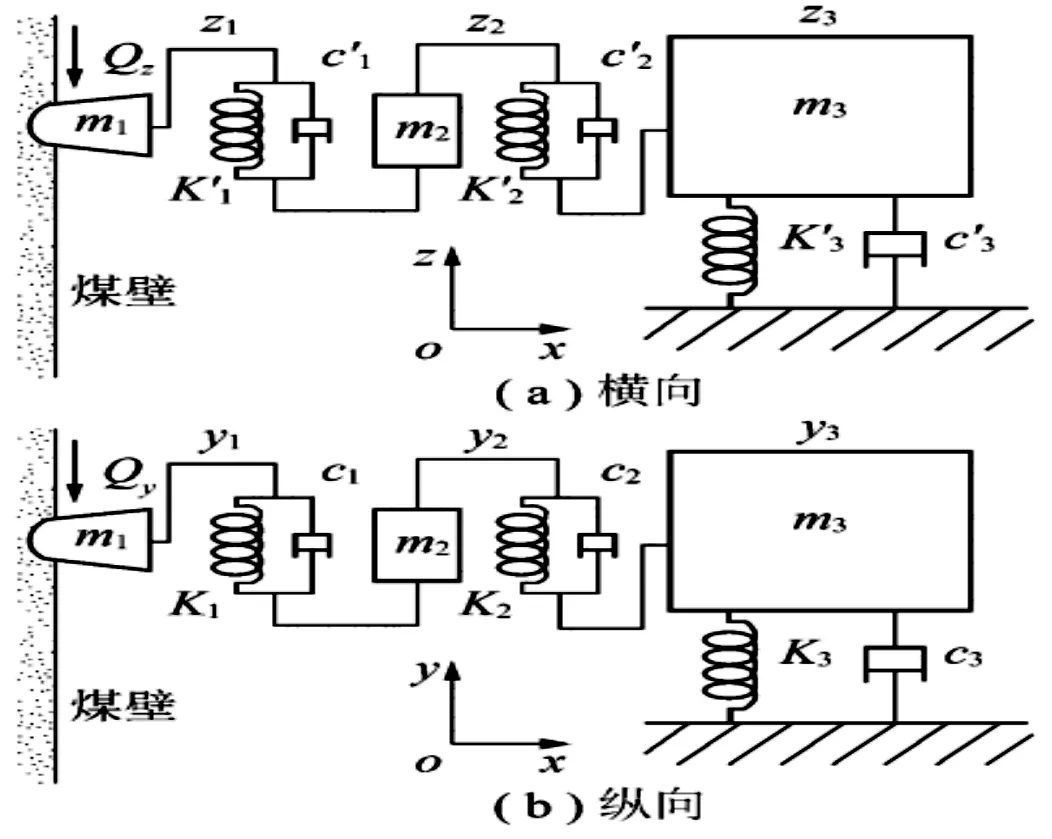
图1 掘进机横向、纵向动力学模型
系统的拉格朗日方程:

式中,Qj为激振力;t为时间;为广义速度及广义位移;j=1,2,3,……。系统的纵向势能V、动能T和耗散函数D为:
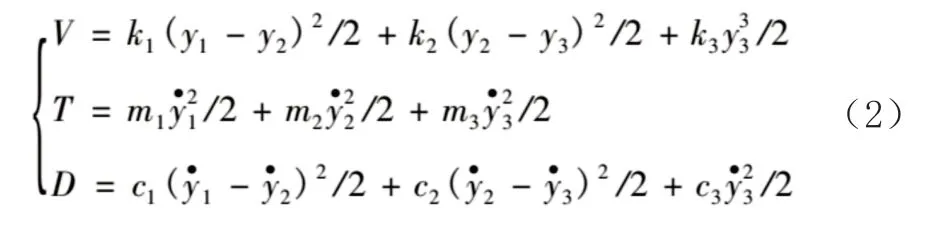
将(2)代入(1)得方程:

同理,求得横向运动微分方程为:

(3)构造截割头载荷的虚拟激励
如果线性系统受到自然高光谱密度Sxx连续激发(t),则其响应中的自然电光谱为y[Syy]=|H|2[Sxx],H是常数响应函数。
使用传统方法计算Syy需要花费很长时间利用公式算出频率响应函数矩阵|H|虚拟激励方法具有简单,高效的优点。
使用虚拟激励方法来构造虚拟激励x(t)=槡Sxxejωt和相应的答案y(t)=H槡Sxxejωt,显然y*y=|y|2=|H|2Sxx=Syy如果答案继续一个,则功率谱矩阵的表达式为[Syyi]={yi}*{yi}T(i=1,2,3,...)。
将方程(3),(4)写成如下矩阵形式。

式中,M、C、K分别为质量矩阵,阻尼矩阵和刚度矩阵;F为随机激励的n维指标向量,F={100}T;y={y1y2y3}T。
研究表明,最大的负载可以看作是一个广泛而强大的过程,无需选择。意义和方差与时间无关,自相关和协方差随时间转移,与过程的开始和结束无关。

式中,ω=2πk/N;k为任意整数;R(n)为截断随机信号的自相关函数。
3.系统响应的模拟分析
当使用具有纵轴的标头作为研究对象时,用汇编语言Matlab来模拟标头系统。相应的参数如下:煤腔角Φ=45°,煤的抗切割性A=378N/mm,煤的脆性B=2.5,采样频率fS=512Hz,质量m1=1051kg,m2=2415kg,m3=56534kg;刚度系数k1=8×105N/m,k2=6.72×105N/m,k3=3.86×103N/m;k1′=8×105N/m,k2′=6.91×105N/m,k3′=5.11×103N/m;阻尼系数c1=5.83·104N·s/m,c2=3.75·104N·s/m,c3=3.36·104N·s/m,c1′=6.05·104N·s/m,c2′=3.54×104N·s/m,c3′=4.53·104N·s/m;刀头转速n=46r/min,刀具数量n=48。
(1)固有频率与振型
用Matlab汇编器来分离路标的横向和纵向微分方程。然后可以确定标头系统的固有频率。三阶固有频率为ω1′=0.483.3Hz,ω2′=2.4562Hz,ω3′=6.6333Hz,ω1=0.4295Hz,ω2=2.0135Hz,ω3=5.3035Hz。
(2)位移响应分析
在稳定的随机激励的影响下,用于建模截割头,控制台和主体的横向和纵向过渡的光谱功率密度曲线如图2所示。三个与光谱功率相对应的数字峰对应机体、悬臂以及截割头的固定频率,可以看出悬臂和截割头的横向位移响应小于纵向,且集体的横、纵向位移相差较大。图2还显示,频率标度始终集中在2Hz到4Hz的范围内,接近自然频率的二阶(ω2′=2.4562Hz,ω2=2.0135Hz)。因此,在设计掘进机时,必须考虑外部输出的影响,以使工作频率与固有频率不同,以避免共振。
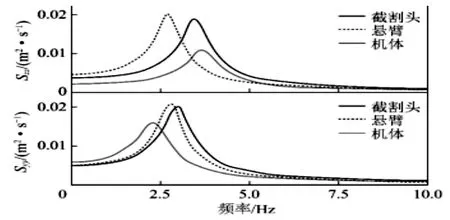
图2 位移功率谱密度
在没有高力的情况下截割头,悬臂的纵向和横向位移的特征,从图中可以看出,而机体的振幅最小。疏散响应统计信息请参见表1。通过连接整个机器系统,外部导体可以切断机头。对头部切割的响应变化和纵向位移的增加略小于横向变化,平均差为0.0013m和0.0029m,且变化或幅度为0与完成功率谱分析相反,车身的纵向位移明显大于侧面的纵向位移,平均差为0.001±39m。
(3)模型验证
遵循多刚体动力学原理,使用Pro/e创建具有纵轴的掘进机3D模型,并使用Adams/view软件将具有多种动力学特性的整个机器模型进行匹配,以确定材料,载荷的特性和成分强度和抗性。对于速度和阻尼参数,步距为300,模拟时间为10s,并设置了多刚性掘进机的动态模型。
截割头,悬臂和机体的横向和纵向位移的变化。0~1s该模型具有不同程度的自愈能力,并具有较高的振动速度。从横向位移1s到10s的三个阶段的响应分别为0.0086m,0.0067m,0.0012m,纵向位移响应的平均值为0.0093m,0.0071m,0.0043m。变化是随机的。响应分析的结果基本相同。
从建模结果可以看出,动臂的振动力小于理论值。由于部件受冲击影响,位移的平均变化略大于理论值。集机体受到轨道和底板之间的影响,纵向位移大于横向位移的幅度。
4.总结
建立并分析了具有内部激励的割台运动中垂直轴路径的方差方程。借助于Adams,对具有多个刚体的道路和桥梁的动力学模型进行了建模和分析,这些结果从文章中可以看出,该方法可用于研究纵向隧道掘进机的随机振动。
系统的固有振动频率和根模式可以通过将采矿机的横向和纵向运动分开来确定。掘进机的水平振动和连续振动的频率测量特别着重于低频范围(7Hz以内)。初始固有频率(2,4562Hz,2,0135Hz)对系统的振动有很大的影响。在设计机体时,必须考虑随机载荷的影响,以防止整个机器的固有频率不断接近工作,并最大程度地减少内部造成的对旅行箱部件的损坏。
