电励磁同步电机无速度传感器矢量控制研究
2021-07-24李党盈赵永波刘耿博
李党盈,张 红,赵永波,刘耿博
(西安麦格米特电气有限公司 工业电源事业部,西安 710075)
0 引言
风能是一种取之不尽的清洁能源。近年来,在各种平价政策的推动下,上网电价逐年走低,风能相比化石能源的优势愈发突出,发展前景被业界看好。目前成规模使用的风电机组共有三类:双馈异步型、永磁同步型和电励磁同步型。相对另外两种电机,电励磁同步型调速性能优越,高速运行效率高[1],整机成本较低,通过励磁调节,能够实现单位功率因数运行,可充分利用变频电源的容量。
为获得较好的控制性能,实现励磁和转矩的解耦,电励磁同步电机中通常利用基于磁场定向的矢量控制。但是在电励磁同步电机中安装转速反馈所需的传感器较困难,且传感器一旦出现故障就会造成机组瘫痪,降低了整个系统的可靠性。采用无速度传感器控制,可避免这一现象[2]。本文基于模型参考自适应系统(MRAS)对电机转速辨识算法进行了研究,给出了电压型磁链改进观测模型,简化了实现电流型磁链观测的方法,在电压和电流模型磁链观测结果的基础上定义广义误差,并经过PI自适应调节后得到转速信号,最后通过模型仿真和实验,验证了这一方法的正确性。
1 气隙磁场定向控制
电励磁同步电机基于磁场定向控制的电机矢量关系图如图1所示,图中,d轴与电机转子同向,M轴与气隙磁场同向。
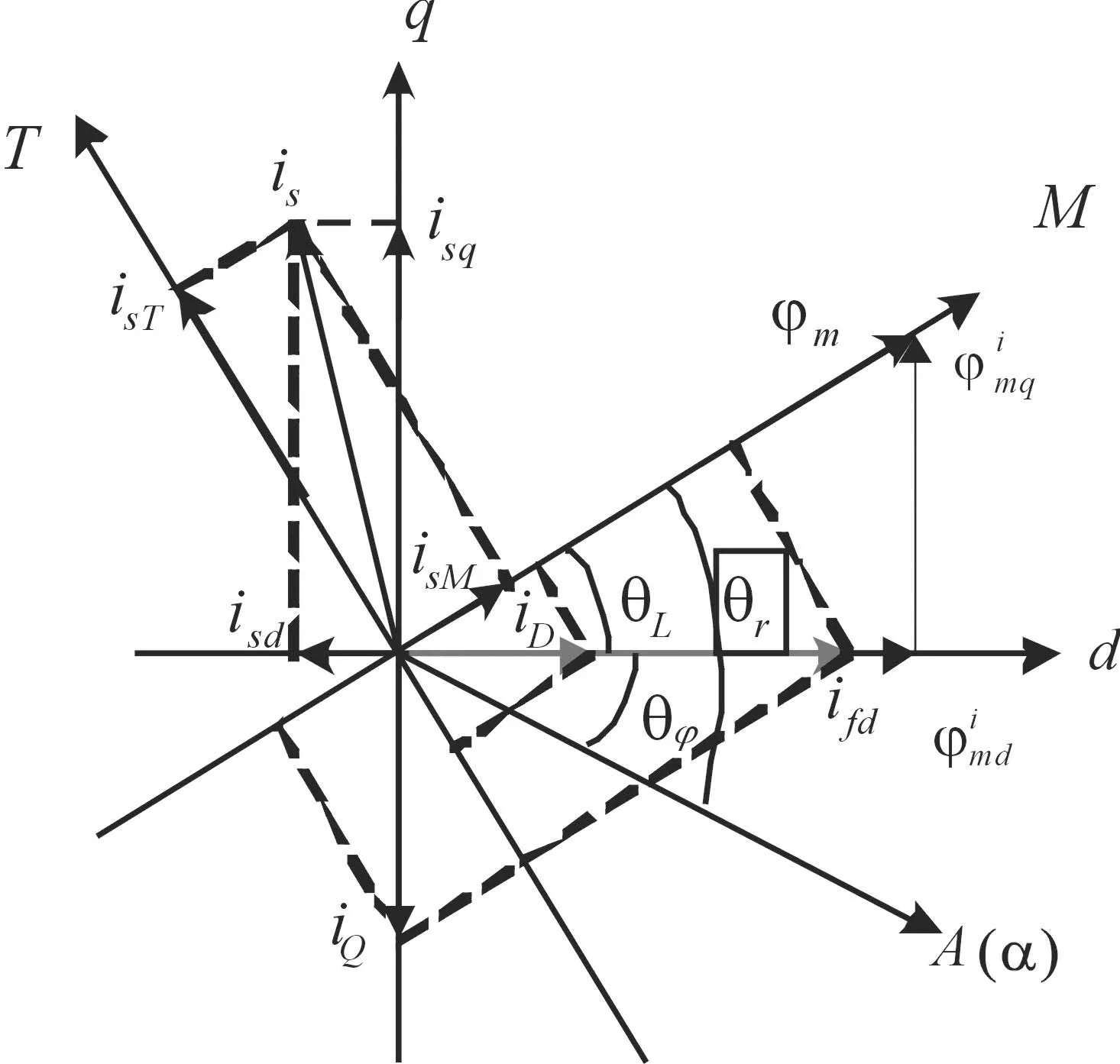
图1 电机矢量关系图
定子电流在M-T坐标系中由转矩电流isT和励磁电流isM两个正交分量合成。由于M轴定向于气隙磁链φm,那么分解在T轴上的气隙磁链为0,即满足下式:
isT=ifdsin(θL)+iDsin(θL)+iQcos(θL)
(1)
定义电流im为气隙磁场的励磁电流,其方向与φm相同。假设Lm为气隙等效电感,由图1可得:
在气隙磁场定位于M轴同时维持其幅值不变,根据电机统一转矩公式可知电机转矩与定子电流的励磁分量关系如下[3]:
由公式(2)和(3)可知,转矩与磁链可以进行单独控制,从而实现解耦。根据转矩、磁链与定子电流和励磁电流的关系,得到电励磁同步电机基于气隙磁场定向控制系统原理图如图2所示。反馈转速通过无速度传感器辨识得到。为提高功率因数,定子励磁电流给定值通常设为零,气隙磁场的强度通过控制励磁电流来保证。
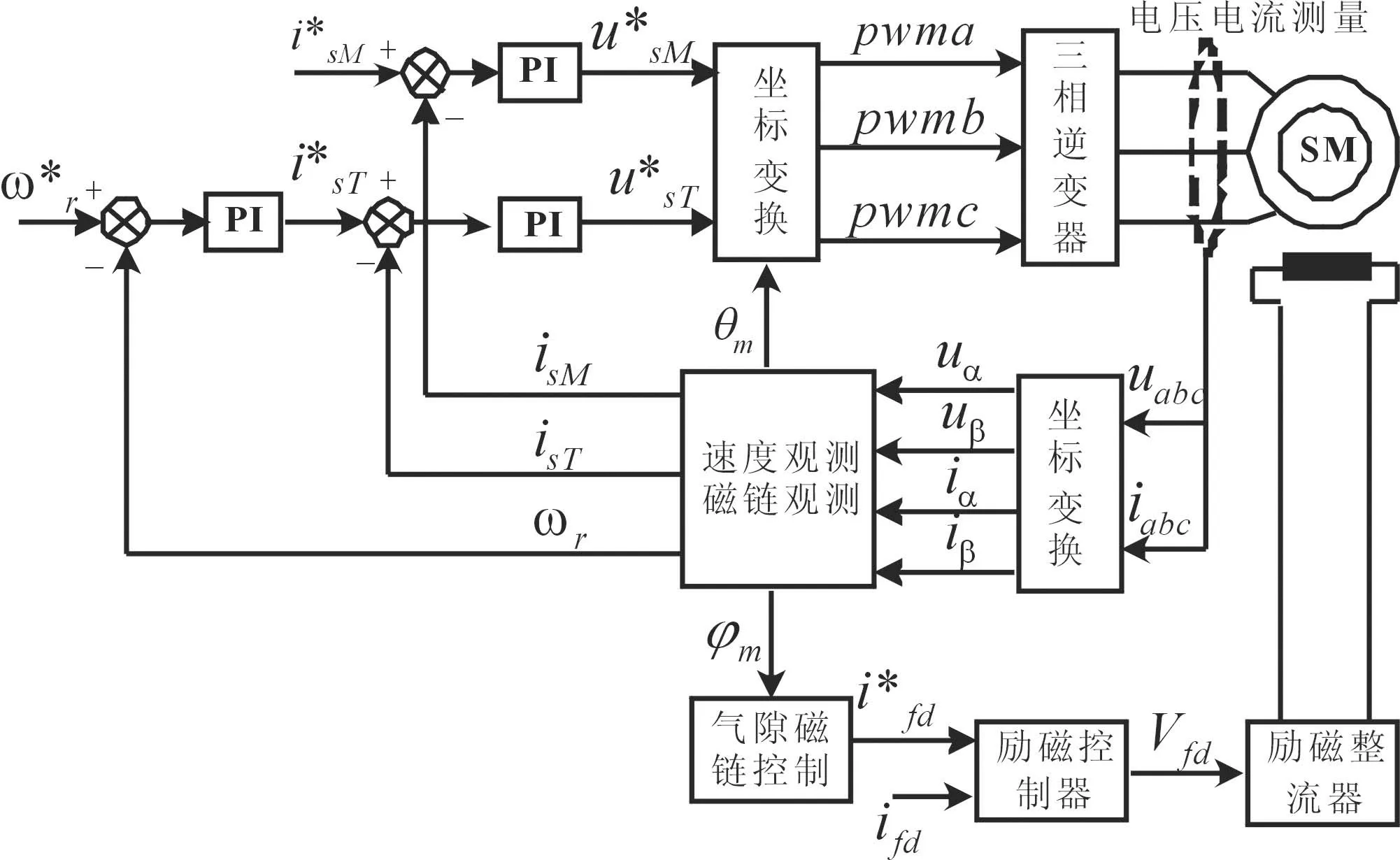
图2 气隙磁场定向控制系统原理图
2 无传感器速度辨识
2.1 基于模型参考自适应理论的速度辨识
MARS是将含有待估计参数的方程作为可调模型,不含未知参数的方程作为参考模型,利用其输出量的差值,选择合适的自适应律,动态更新可调模型中的估计参数,使得两个模型的误差在稳态时趋于零,从而得到反映实际值的参数[4]。电机控制中通常使用电压和电流磁链模型。电压气隙磁链的计算公式为:

电流气隙磁链计算公式为:
电压模型作为参考模型,输出气隙磁链的给定值;电流模型中包含转子角度θr,作为可调模型,输出气隙磁链的估计值。磁链广义误差定义为:
根据自适应原理,利用广义误差中的转子位置信息,设计出速度辨识方案,模型参考自适应转速辨识原理图如图3所示,其中自适应调节器为PI控制器:
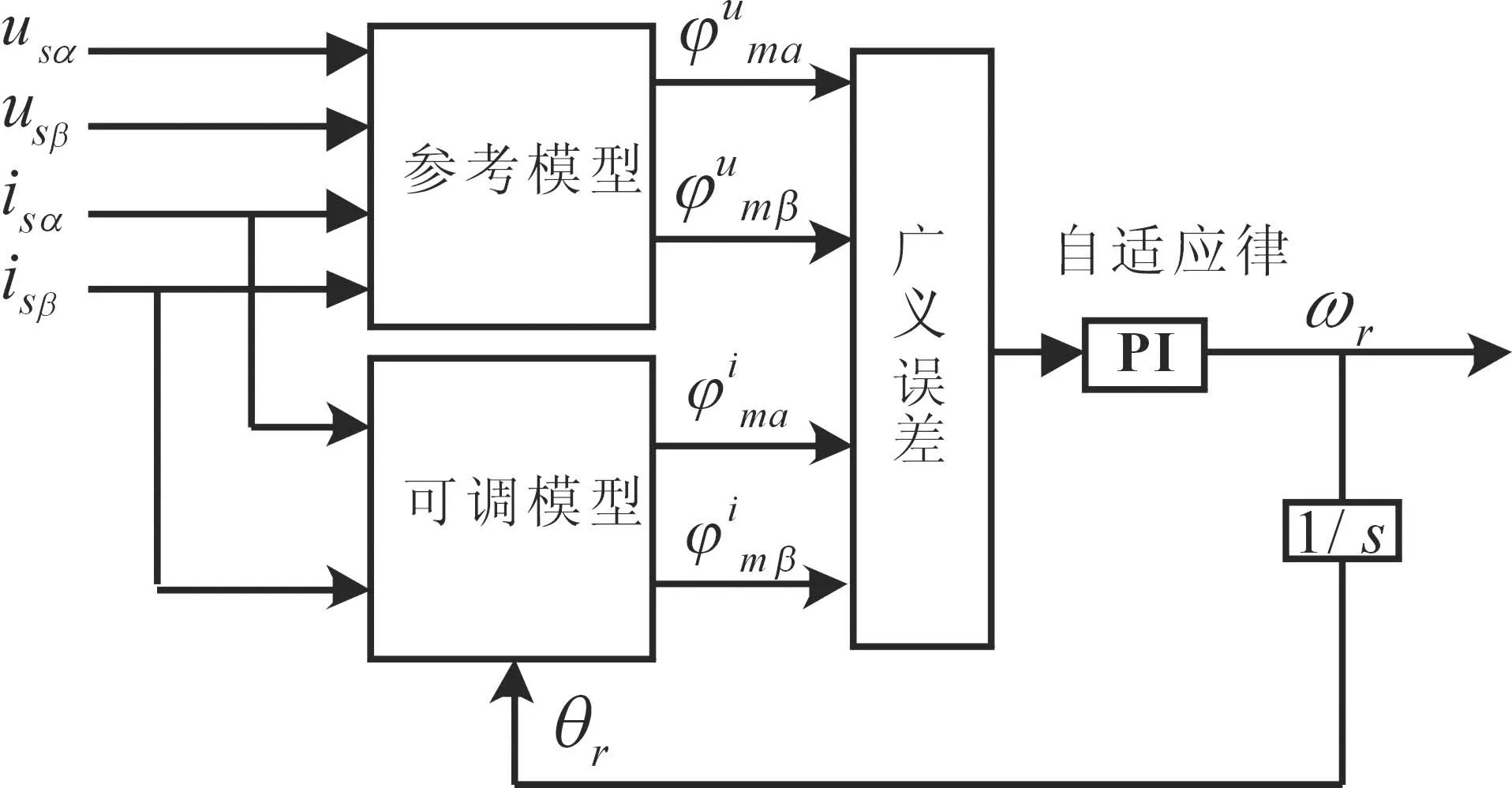
图3 模型参考自适应转速辨识原理图
转子角度为转速的积分:
基于波波夫超稳定理论的详细推导及证明[5],转速辨识经过自适应律,可以保证其稳定性。
2.2 电压磁链的改进观测模型
公式(4)为电压积分型磁链观测,这种算法存在直流偏置饱和及设置初始值问题,积分器为低通滤波,引入了相位延时使其性能难以满足要求。本文采用改进的电压型磁链观测模型,可避免这些缺点,满足全速度范围内的无速度传感器辨识需要。
如图1所示,θφ为d轴与α轴的夹角,则定子磁链矢量可表示为:
其中,Aφ为定子磁链矢量幅值。对磁链求导,可得到定子电压矢量:
其中,ω为磁链矢量的角速度。将电压矢量分解到d-q正交坐标系,可得到两个电压分量:
对同步转速进行积分可以得到磁链的相位角θφ:
根据式(11)和(12)的推导结果,可设计出闭环形式的电压磁链观测模型如图4所示。校正环节k的加入,有助于提高系统稳定性[6]。由于观测结果为定子磁链,需根据式(4)减去定子的漏感,才可得到气隙磁链。该观测模型不存在偏置饱和、圆心偏离等问题,是一种高性能磁链观测器。
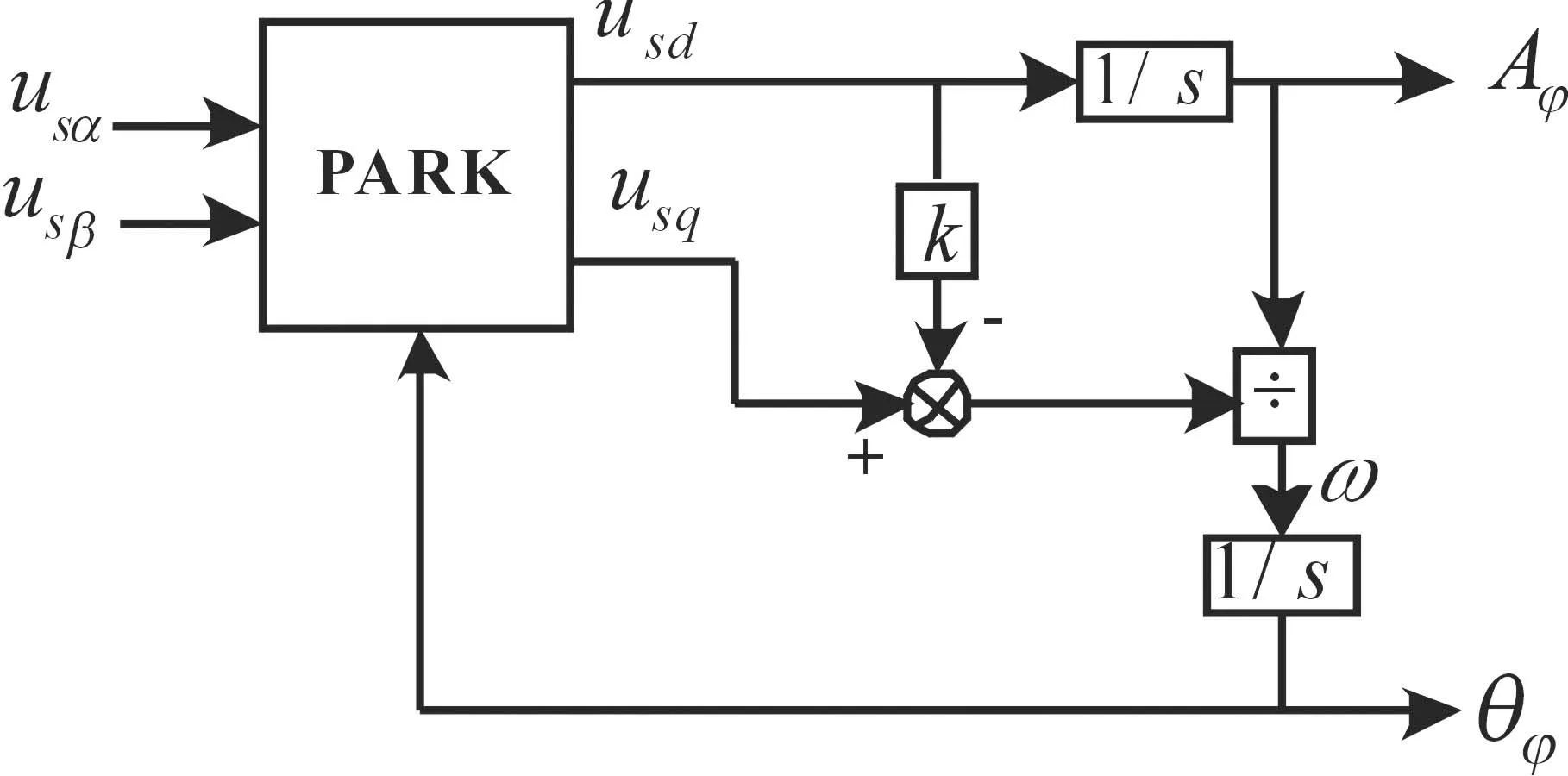
图4 闭环形式的电压磁链观测模型
2.3 电流磁链模型的实现
由图1的电机矢量关系可知,电流气隙磁链表达式为:
阻尼绕组中的磁场感应电压和电阻电压之和为0,即:
阻尼绕组通常为短路鼠笼环,其电流iD、iQ无法测量。工程条件允许下,通常忽略阻尼绕组的漏抗,即令φD≈φmd,φQ≈φmq。综合公式(13)和(14)可求得同步旋转坐标系下电流模型观测的气隙磁链为[7]:
其中,p为微分算子,TDd、TDq为阻尼绕组开路时间常数。
3 仿真与实验研究
3.1 仿真研究
3.1.1 系统仿真模型
电励磁同步电机无速度传感器矢量控制系统仿真模型如图5所示。模型主要由电机、控制器和变频主电路组成,此外,还包括电压电流测量、PWM调制波等部分。模型中的控制由MATLAB软件的系统函数实现。系统函数使用高级语言进行代码开发,用以实现转速磁链观测、矢量变换及解耦控制、运行流程切换等功能。仿真系统的函数代码可直接移植到控制芯片的应用程序中,加快了产品的开发速度。
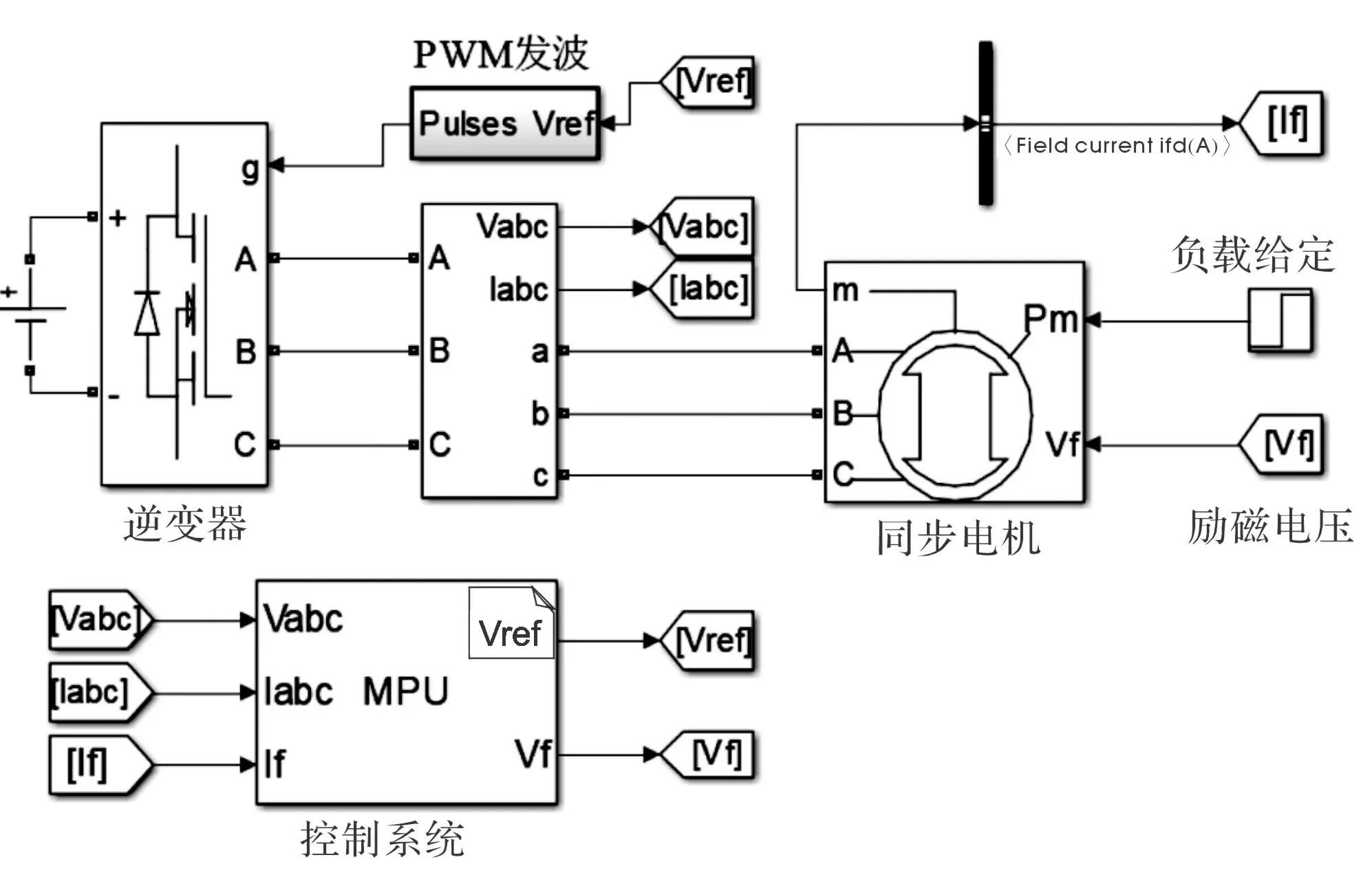
图5 电励磁同步电机无速度传感器矢量控制系统仿真模型
为了与实验工况保持一致,仿真所用电机为兆瓦级直驱型风力发电机, 其各项参数由电机厂通过实际测量给出,电机参数如表1所示。
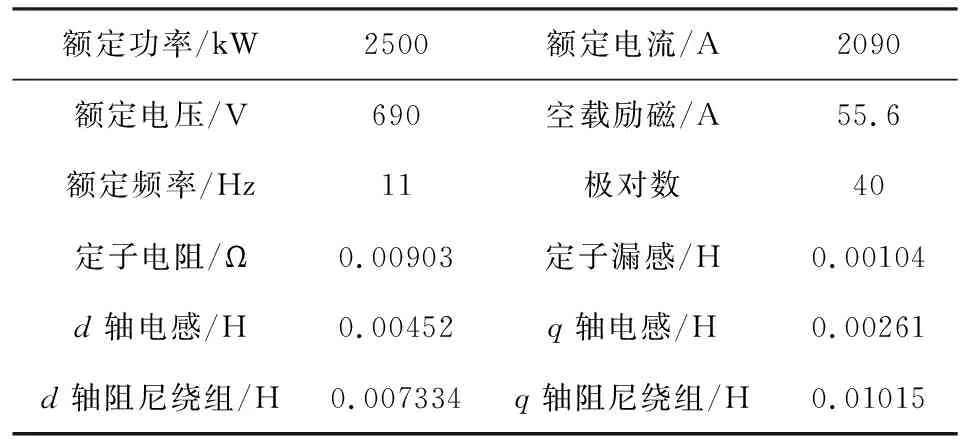
表1 电机参数
3.1.2 仿真结果及分析
系统的仿真分两个阶段进行。首先控制直流电源,使转子励磁绕组的电流逐步上升到额定值。励磁电流的变化引起电机磁场的变化,进而在定子绕组上感应出反电压。通过电压型观测器,可以估算出转子的初始角度。然后启动变频器,通过斜坡给定方式,将电机转子从静止状态加速到额定转速。
仿真波形如图6所示,其中图6(a)为电机转速的实测值和估计值转速辨识曲线,图6(b)为转子角度的实测值和估计值角度辨识曲线,图6(c)为电机在启动过程中的电机定子电流波形。从图中可以看出,电机启动过程中的估计值与实测值有一定误差,待电机稳定之后,转速、相位的观测量与实际量已完全相同。整个启动和运行过程中,电机转速平稳上升,定子电流平滑且无波动,满足无速度传感器控制的要求。
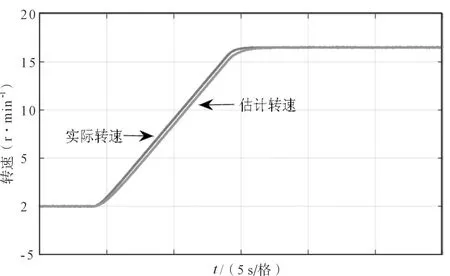
(a) 转速辨识曲线
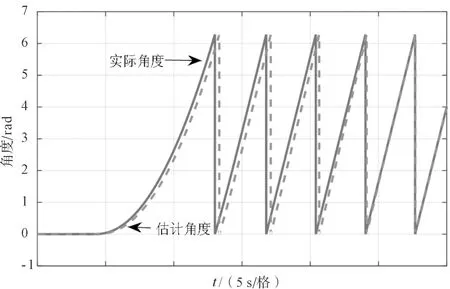
(b) 角度辨识曲线
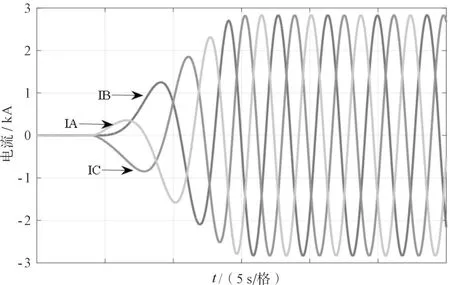
(c) 电机定子电流波形
3.2 实验研究
在某公司实验基地进行电励磁同步风力发电机系统测试,该公司研制生产的直驱式电励磁同步风力发电机如图7所示。测试平台采取两台同型号电机联轴对拖的方式,其中陪试电机处于电动状态,被试电机处于发电状态。实验系统由两台大功率变频器提供电源,变频器共用一条直流母线实现能量回馈。一台变频电源驱动陪试机,采用速度闭环控制;另一台用作被试机进行能量馈送,因为需要调节并网功率,采用转矩闭环控制。

图7直驱式电励磁同步风力发电机
在电机的定子接线端接有功率分析仪。两台变频器均采用无速度传感器矢量控制算法进行控制。根据实验要求,给定陪试电机转速为电机额定转速16.5 r/min。电机转子到达额定功率和额定转速之后的定子电流波形图如图8所示。电机在稳态运行时,通过转速传感器的通信数据进行描点和绘图,测得的电机实际转速波形图如图9所示。电机转速围绕给定值,在一个很小的范围内波动,其波动幅度小于万分之二,满足电机试验的要求。
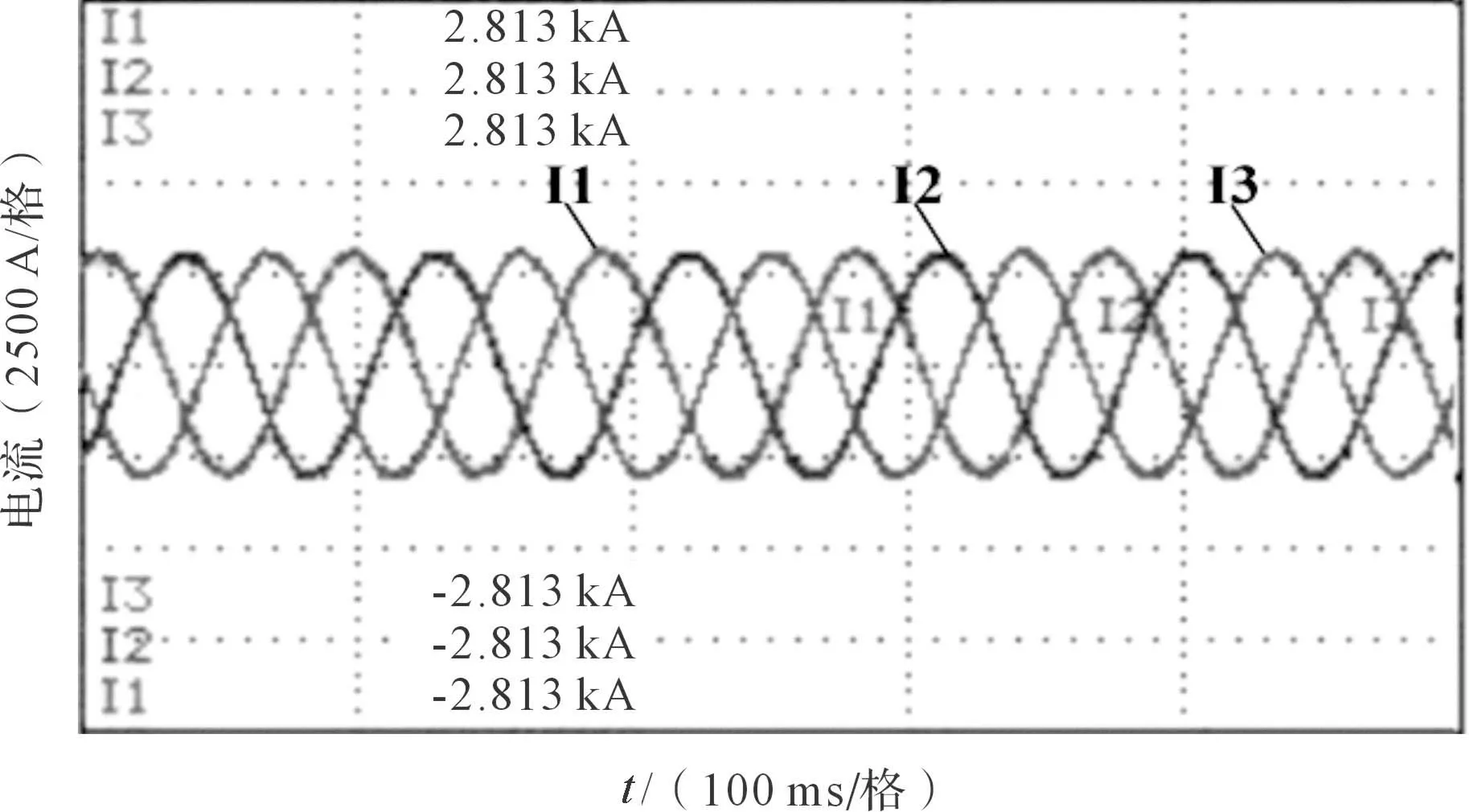
图8定子电流波形图
4 结论
电励磁同步电机以其高性能和低成本的优势,在兆瓦级直驱型风力发电机组中的应用越来越广泛。本文分析了同步电机的磁场定向矢量控制原理,提出了基于MARS的无速度传感器辨识算法,在MATLAB中搭建系统模型,进行了仿真和实验研究。仿真和实验结果表明该方法能够准确辨识转速,满足电励磁同步电机无速度矢量控制的要求,有较强的理论意义和实践指导价值。
