水下爆炸物羽流跟踪与定位技术仿真研究
2021-07-14张忠波胡光兰
张忠波,雷 敏,胡光兰
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
水雷武器以隐蔽性好、打击突然、易布难除、效费比高、能完成战略任务等独特优点,为历代海战兵家所情有独钟。在第一次世界大战中,各交战国共布放水雷31万枚,击沉各种舰船800余艘,占当时舰船损失总数的34%。在二战中,各交战国共布放水雷80余万枚,击沉各种舰船2 700余艘,占当时舰船损失总数的11%。二战以来,号称世界第一的美国海军独霸海洋,几乎没有敌手,然而对美军舰艇造成最大损失的却是水雷。据统计,从朝鲜战争以来,先后有20艘美舰遭到敌方的直接打击而不同程度地损毁,其中15艘是被水雷击伤的。以美国为代表的西方各海军强国认为,水雷将给海军的作战行动带来最为严重的影响,反水雷是海军的核心作战能力,必须对水雷战给予高度重视。
在与水雷的对抗中,反水雷[1-2]始终处于一种不对称的被动地位,始终是一项充满不确定和危险的使命任务,西方各国海军一直在不遗余力地发展反水雷装备,试图打破这种不对称性。传统检测方法主要采用声、光、磁等物理方法对水雷探测、识别和定位[3],只能从外观和外壳材料上判断是否为疑似水雷目标,无法确定其是否含有爆炸物,是否存在威胁等。
搭载化学痕迹检测[4]的UUV系统可以根据水雷装药口渗出的爆炸物羽流特性搜寻和跟踪到真实目标。本文的研究对象具有很强的特殊性,可供直接借鉴的文献很少,在对类似羽流研究中,常见的研究建模方法主要有 Mie氏散射理论[5]、欧拉-拉格朗日方法[6]、图像灰度[7]、CFD数值方法[8]等。
本文建立了水下爆炸物羽流跟踪模型,搭建了计算仿真环境[9],模拟 UUV在水中环境对化学羽流追踪及源头定位的过程。模型可以通过更改流场信息、羽状物扩散条件等方式模拟出不同形式的化学羽流,以模拟不同环境下的化学羽流运动,验证UUV利用追踪方法对不同环境下的化学羽流追踪和定位的有效性,并保证较高的成功率。
1 仿真模型
1.1 仿真模型设计要求
在满足实时性的要求下,集成UUV所处环境和UUV自身的仿真模拟于一个整体。要求如下:
1)通过求解物理方程,获得对流场演化较为真实的模拟,实现流场在一定程度上随机的变化,并满足实时性要求。
2)实现化学羽状流输运较为真实的模拟,获得化学羽状物空间分布,并满足实时性要求。基于羽状物分布,提出合理的化学浓度模型。
3)UUV运动的模拟能够较为真实地反应欠驱动载体在水动力作用下的运动特性,并满足实时性要求。
4)UUV化学羽状流自主追踪任务规划模块不能直接获取化学羽状物释放源头的位置信息,而是通过传感器的信息进行自主追踪羽状流,并确定化学源头。化学源头位置信息只用于羽状物输运的模拟。由此,可以检验自主追踪的有效性。
5)实现较好的用户交互功能。参数的设置方便并能立刻生效,输出结果可视化。能实时监控UUV的状态。
1.2 总体框架
本仿真模型主要分为2个大的框架:第1个框架用于模拟UUV所处的环境,包括流场实时计算模块、化学羽状流输运模块;第2个框架用于模拟UUV自身,包括基于行为的规划模块、运动模块、载体操纵性模块等。传感器是UUV本体所搭载的用于感知环境的设备。传感器模块是2个框架之间的交互接口。
如图1所示,流场实时计算模块负责搜索区域内流场的演化,并得到流场的分布。化学羽状流实时输运模块需要依赖这个流速分布计算羽状物的分布。化学浓度模块依据羽状物的分布可以计算化学羽状物浓度C。UUV的流速传感器模块依据流场分布计算出UUV当前位置处的流速Up,UUV的化学传感器模块依据化学浓度模块计算出UUV当前位置的化学浓度Cp。UUV的规划模块依据流速Up、化学浓度Cp以及从位置传感器获得的当前位置p来进行化学羽状流自主追踪的任务规划,并将目标艏向角ψ和目标速度值Vc传递给运动模块。运动模块生成适当的执行机构(舵桨)命令。执行机构的受力导入载体操纵性模块进行计算,能够更新UUV的状态和位置。
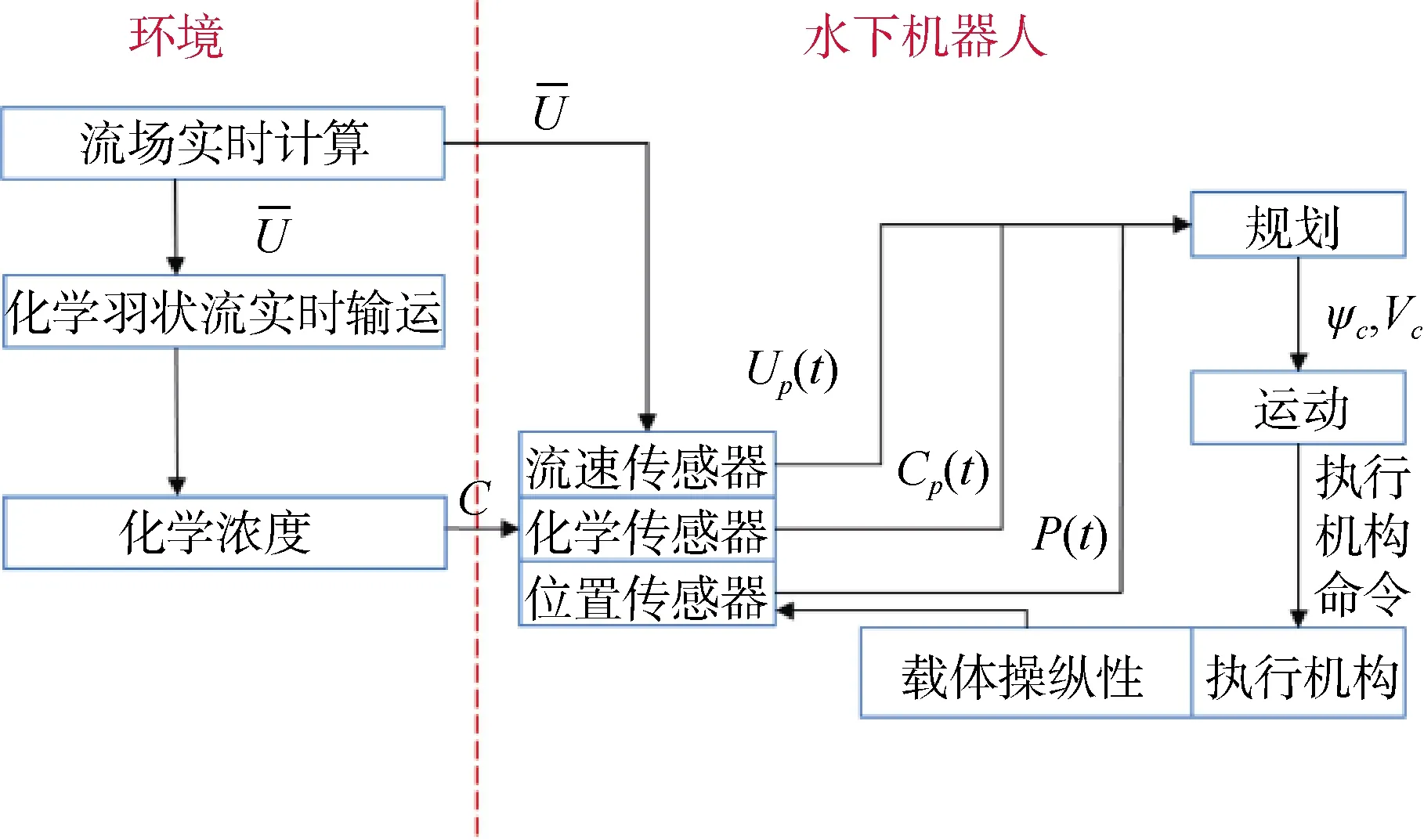
图1 总体框架Fig. 1 Diagram of general framework
1.3 仿真模型设计
在计算和验证本仿真模型的研究过程中,搭建了计算、仿真和现实软件环境。采用串口通信程序用于接收采集DSP输出的加速度计、陀螺和浓度传感器的测量数据。通过定义串口读中断事件和串口中断处理函数,实现了数据的自动采集,内部进行数值计算后,以MATLAB图形方式实时显示数据。
2 水中仿真实验验证
水中仿真实验中,设定的搜索区域为150 m×100 m,源头位置为(0,0),界面的右上角设定为(150 m,-50 m),左下角为(0,-50 m),如图2所示。
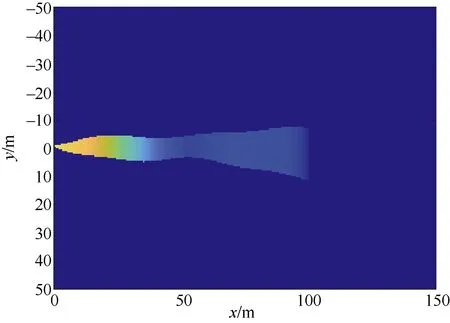
图2 羽流仿真示意图Fig. 2 Schematic diagram of plume simulation
实验过程中,UUV的采样周期为0.5 s,将搜索区域划分为50×50个网格,规划持续时间为5 s,丢失周期为20 s,保留40条流速/流向信息,人工势场方法的伴随网格为11×11,浓度阈值设定为0.2。
2.1 水中搜索行为仿真实验
UUV首次探测到羽状物信息的时刻,即成功探测到羽状物,进而转为追踪羽状物行为。在探测到羽状物后,改进人工势场法计算指令艏向角,UUV沿指令艏向角方向继续进行羽状物追踪。
图3所示为变化Z字形搜索行为的水中仿真搜索行为图,源头所在位置坐标为(0,0),UUV从位置(100,-50)开始在搜索区域内进行搜索羽状物行为。曲线条表示的是UUV运动路径,曲线条首部位置的箭头表示的是 UUV当前时刻的艏向角,首部的箭头表示的是当前时刻指令艏向角。

图3 搜索羽状物行为水中仿真图Fig. 3 Simulation map of plume searching behavior
2.2 水中再发现行为仿真实验
下面将对再发现水中仿真过程进行说明。UUV的初始位置为(150,50),初始时间为t=0。如图4所示,UUV从初始位置开始进行搜索羽状物行为,在t=149 s时刻,UUV在点(120,20)处第1次探测到羽状物信息,转为追踪羽状物行为,沿着改进人工势场计算出的艏向角追踪羽状物。在追踪过程中,UUV在t=183 s时在点(80,10)处丢失羽状物信息,转为再发现羽状物行为。再发现过程中,UUV在搜索完最内层的近似三角形路径后仍没有探测到羽状物,继续在第2层路径搜索,进行到将近一半路径的时候,UUV在点(50,5)处探测到羽状物信息,因此结束再发现行为,再次转为追踪行为。
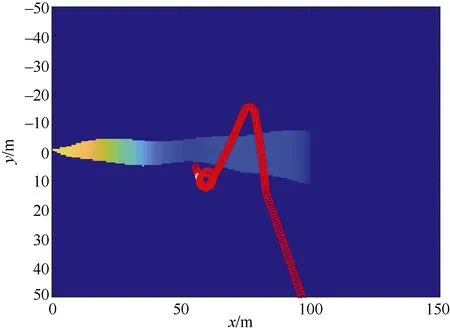
图4 再发现行为水中仿真过程图Fig. 4 Simulation process diagram of underwater rediscovery behavior
为了验证再发现行为在水中仿真平台上应用的可靠性,30次实验结果统计:成功26次,失败4次,成功率可达87%。经过陆地和水中仿真平台的实验验证,本文提出的再发现羽状物行为能适应不同的流场环境,丢失羽状物后可以快速地再次探测到羽状物,且具有较高的成功率,体现了搜索方法的自主性和智能性。
2.3 水中源头确认行为仿真实验
本节重点探讨水中仿真平台进行源头确认行为的仿真验证。水中仿真平台的源头位置为(0,0),图 5为源头确认行为水中仿真示意图。图中,在t=427 s时刻,UUV在进行源头确认行为;该时刻计算得出的源头概率值最大位置Ci,为(0,0.5);源头概率值最大值为0.907 3,即图中红色区域。计算得出的源头概率最大值超过了设定的阈值τ,因此UUV在红色区域周围进行源头确认。UUV沿近似矩形路径进行了2次确认,2次确认的结果相同,在源头概率值最大位置Ci。上游5 m处没有探测到羽状物,而在下游5 m处探测到羽状物,通过2次确认的结果可以确认源头位置为(0,0)。进行了多次源头确认的仿真实验,统计结果如图6所示。
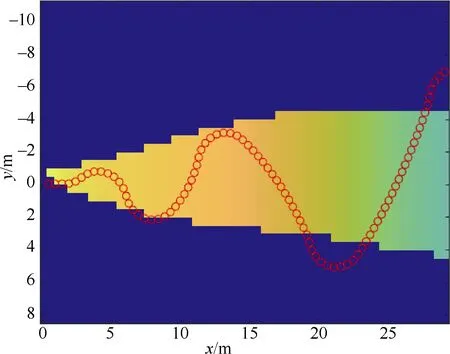
图5 源头确认行为水中仿真路径图Fig. 5 Path diagram of underwater simulation of source confirmation behavior
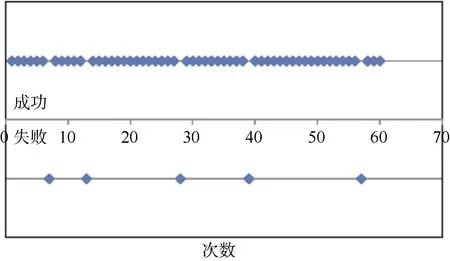
图6 水中仿真源头确认成功率示意图Fig. 6 Schematic diagram of underwater simulation success probability on source confirmation
在仿真实验过程中,将确认的源头位置和真实源头位置之间距离超过5 m定义为失败。在统计的60次实验中,成功55次,失败5次,成功率约为91.7%,可以看出设计的源头确认行为在水中仿真平台具有较高的成功率,可以有效地提高源头确认行为的工作效率,并准确地确认真实源头位置。
2.4 水中追踪行为仿真实验
同样选取了UUV追踪过程中4个瞬间的截图,通过对 4个瞬间的说明来验证提出的追踪羽状物方法的可行性,见图7-10。
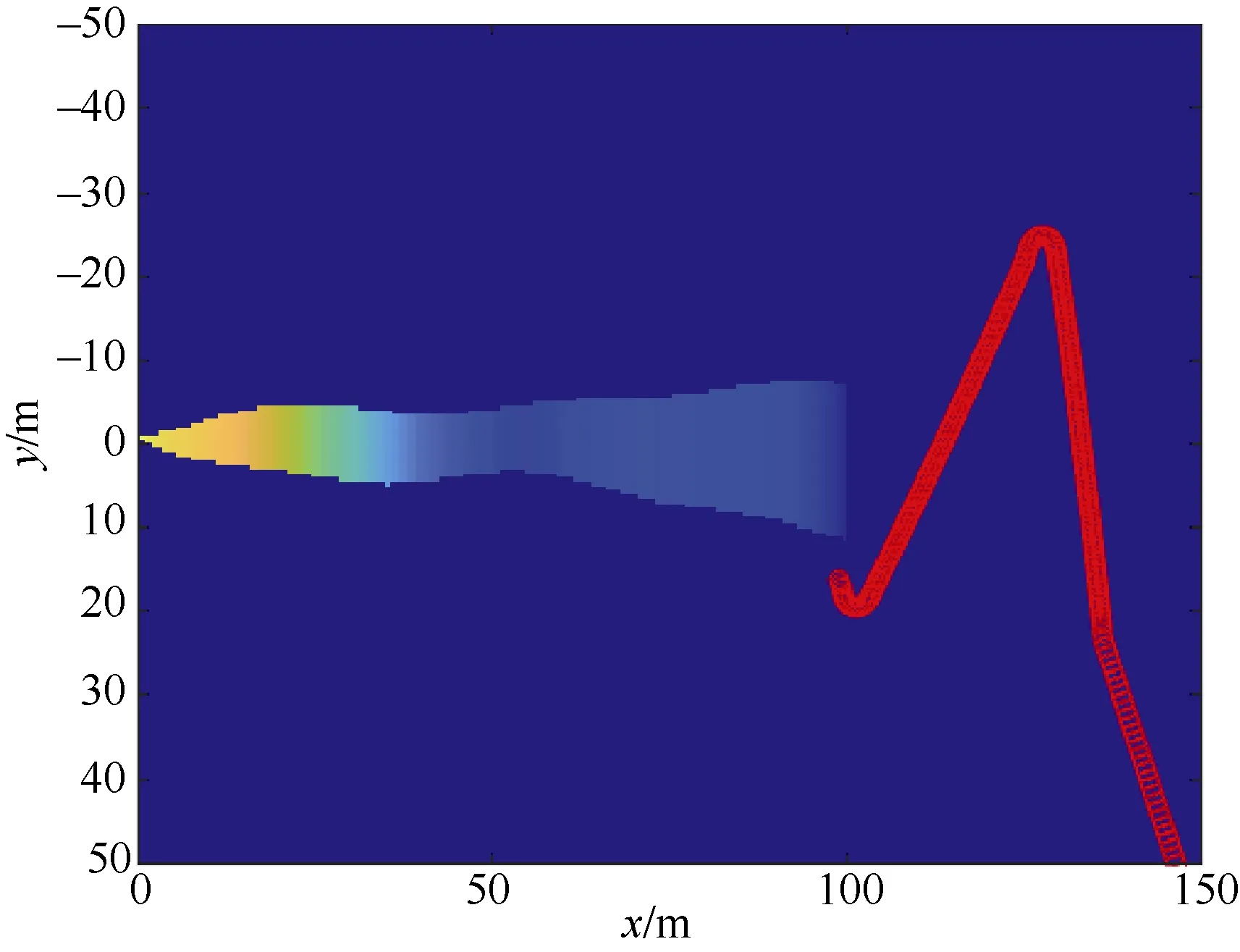
图7 UUV大范围搜索仿真图Fig. 7 UUV search simulatin diagram
如图7所示,UUV从初始位置出发,进行搜索羽状物行为,图中带颜色区域为计算得出的源头概率分布地图。在初始时刻,UUV得到的羽状物信息比较少,所以在大部分区域计算出的概率值都是相同的,只是在自己经过的区域附近概率值有所降低。如图8所示,t=46 s时刻,UUV第1次探测到羽状物信息,转为追踪羽状物行为。图中可以看出,在探测到羽状物信息后,更新了源头概率分布地图,之前全部搜索区域都有可能存在源头的情况消失了,相应的在UUV上游方向出现了面积比较小的深色区域。通过更新的源头概率分布地图,将可能存在源头的区域缩减到很小的区域,通过得到羽状物信息的增多,更新的源头概率分布地图会逐渐缩小到非常小的区域。图9所显示的是UUV利用改进人工势场法进行追踪羽状物的过程。UUV以源头概率分布地图为基础,利用改进人工势场法计算出追踪羽状物的方向,然后沿着追踪方向进行运动,直到确认源头位置。图10所示为UUV在进行源头确认,图中黑色点的位置为概率最大位置,可以看出通过羽状物信息的增多,源头概率分布地图将可能存在源头的位置缩减到非常小的区域,方便UUV进行源头确认行为。通过仿真实验的成功,可以验证基于改进人工势场的方法是比较高效的追踪羽状物算法,可以给UUV提供相对较优的追踪轨迹。在多次仿真实验中,该方法都能成功地找到源头位置,说明该方法具有良好的稳定性。
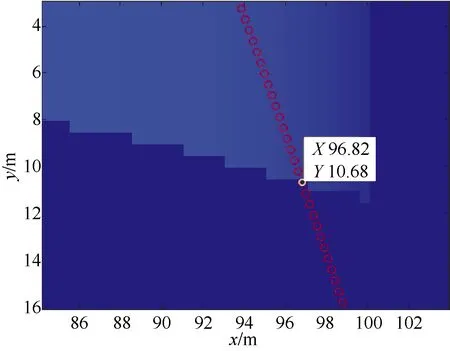
图8 UUV刚探测到羽状物示意图Fig. 8 Schematic diagram of UUV initial detection of plume
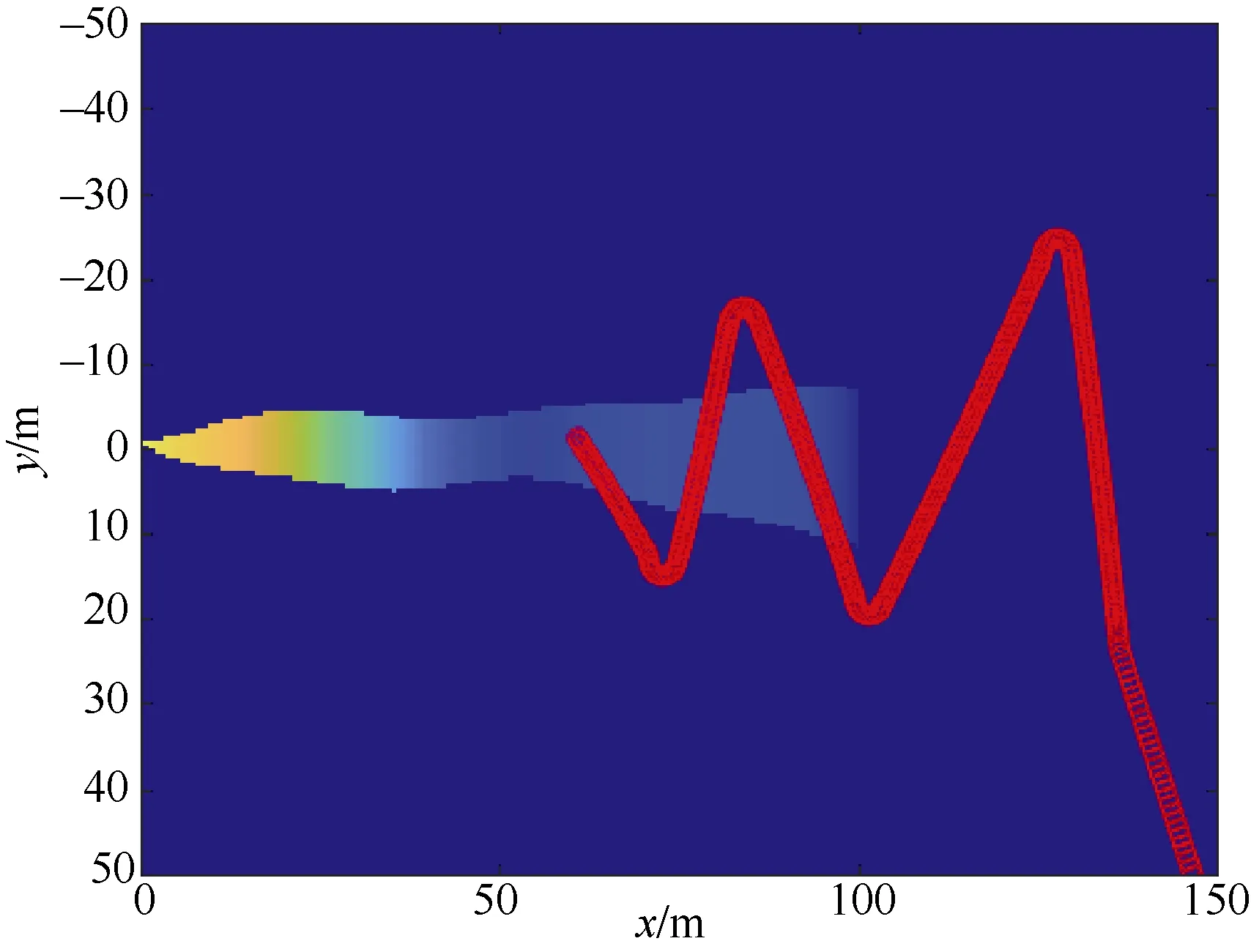
图9 追踪羽状物过程仿真图Fig. 9 Simulation diagram of tracking plume

图10 源头确认过程仿真图Fig. 10 Simulation diagram of plume confirmation process
3 结束语
本文以水下爆炸物羽流跟踪与定位为研究对象,建立了仿真模型。提出了仿真模型设计要求、建立了总体框架、完成了程序设计,并通过爆炸物水中搜索、再发现、源头确认和追踪等行为水中实验仿真验证了此模型的有效性。在后续的工作中,将开展水池和海洋真实场景测试,完善和校准羽流跟踪与定位模型。
