分布式节点海洋环境三维布局优化方法及仿真研究
2021-07-14崔沁青
崔沁青,邓 鹏,丁 浩
(海军潜艇学院,山东 青岛 266199)
0 引言
空气中的目标被动探测[1-2]以及节点最优布局[3]在许多文献中都做过大量研究,但是由于陆地、空中与海洋的环境条件有着很大的不同,很多能够在陆地及空中使用的方法在海洋发展中受到了极大的限制。由于海洋水体环境的分层介质密度,盐碱度以及透明度分区域不同,再加上海水的自身洋流等特质的存在,使得声波在传播的过程中产生衰减[4]。这一系列的信道特性使得水声定位变得较为困难。
通过使用BELLHOP模型[5-6]结合MATLAB对水声信道进行仿真研究。BELLHOP模型通过高斯波束跟踪方法计算非均匀环境中的声场。通过高斯近似方法处理能量焦散和绝对影响等问题,使其适用于复杂环境下的距离相关声线传播的计算。采用BELLHOP模型模拟水声信道,进行BELLHOP仿真,得到相应的输出文件,并研究分析输出文件的信息。然后通过编程得到水声信道的传递函数,从而代入自适应遗传算法的优化函数,进行海洋环境三维节点优化布局仿真。
1 海洋环境模型搭建
本研究中,最重要的一个环节就是模拟海洋环境,在这里利用BELLHOP模型里的传递函数与深度变化的关系模拟海洋环境的变化。海洋环境参数如表 1,信号传播参数如表 2。尽管可以通过.arr文件可以画出幅度-时延图,但是 BELLHOP并没有直接给出从声源到达各个阵元的传递函数h(t),因此需要在.arr文件中提取出信号从声源传到各个阵元的时延信息(这里的时延指的是信号从声源传到各个阵元所用的时间)和幅度信息,通过编程得到h(t)。下面介绍求从声源到第k个阵元的传递函数,下面简称第k路传递函数。
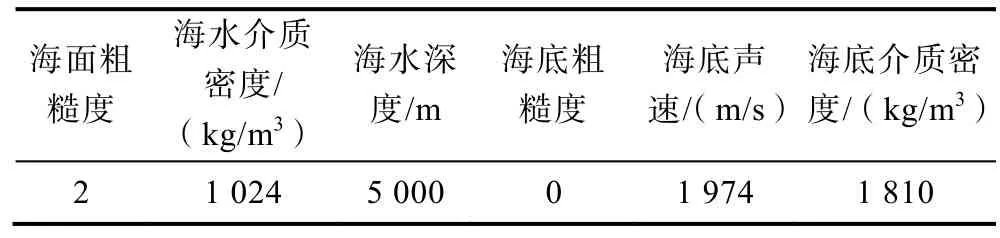
表1 海洋环境参数表Table 1 Parameters of marine environment
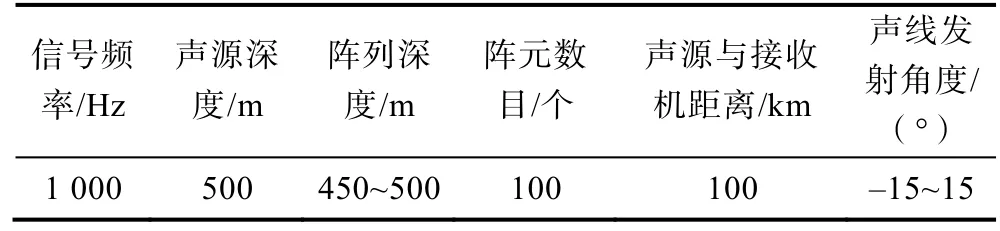
表2 信号传播参数Table 2 Parameters of signal propagation
通过 BELLHOP中的函数提取出所有的时延信息和幅度信息,分别存放到变量delay和amp中。delay(1,:,k)和 amp(1,:,k)表示第k路的时延信息和幅度信息,具体做法如下:
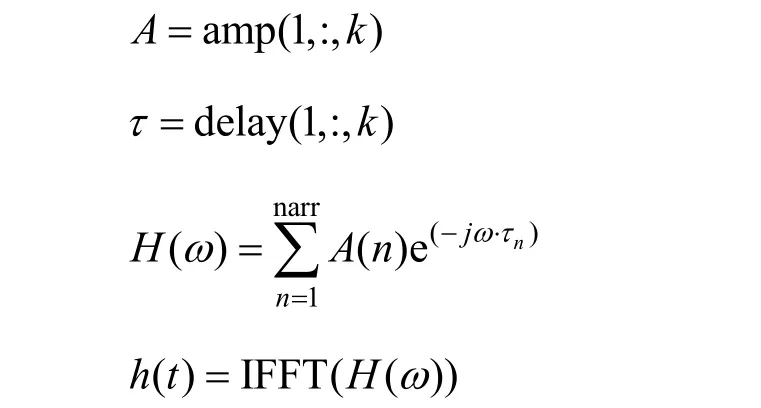
式中,narr为到达的声线个数。
在以上海洋环境参数下用 BELLHOP仿真得到水下声线Munk图,如图1所示。
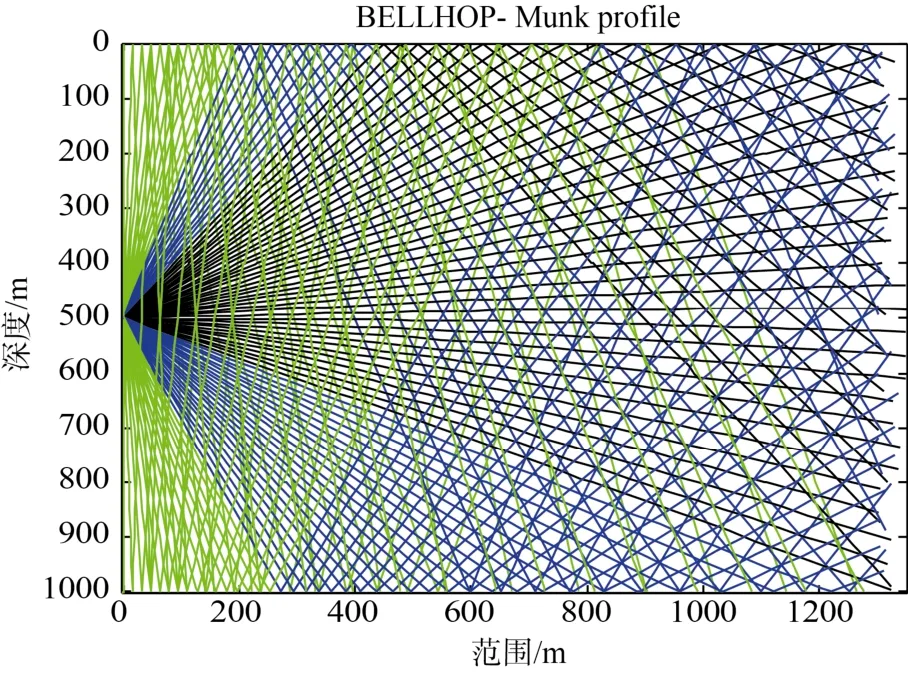
图1 Munk声线图Fig. 1 Sound-ray diagram of Munk
设声源深度为 0~1 000 m,传感器节点深度为0~1 000 m,水平距离为 0~1 200 m,设置间隔space=20 m,及以20为间隔将声源深度、传感器节点深度、水平距离划分为一个51×51×61的矩阵,分别求出所有深度处的传递函数h,所有传递函数也组成一个 51×51×61的矩阵,存入 h.mat。这样就能保证所有深度处的信号都能找到临近的传递函数值。
对传递函数h做一个简要的说明,本文中的h实际上指代的是hmax(传递函数最大值),利用BELLHOP模型中的参数设置,寻找从声源到各个阵元间的直达声线,其用时最短,找到对应的幅度信息,就可求得直达路径的传递函数最大值即hmax,将该传递函数与发射信号做卷积即可得到直达信号。将此直达信号作为阵元处的接受信号。hmax能直接反映某接收节点位置处的信号强度,从而模拟海洋声场环境。
得到 h.mat之后,利用 slice函数画出声源在500 m处,接收机在1 000 m处,水平距离为0时的传递函数切面如图2所示。
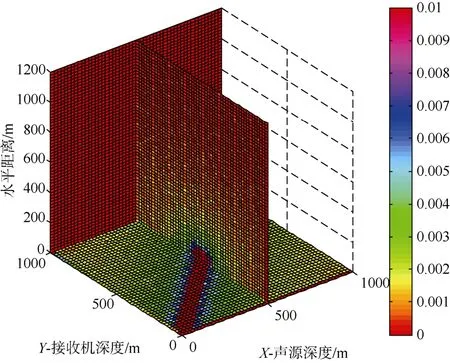
图2 传递函数h切面图Fig. 2 Sectional drawing of transfer function h
从图中可以看出当水平距离为0的时候,声源深度与传感器节点深度相等或者接近时h较大,两者距离越远,h越小,在声源为500 m的截面上也可以看出在声源深度和声源与节点间的水平距离为0时,接收机离声源越近,h越大。随着水平距离的增大与两者之间深度差的增大,h逐渐变小。
图4是在声源深度固定为500 m时,传递函数h与节点深度和水平距离的剖面关系图,当传感器节点位于500 m深,声源与节点之间水平距离很小的时候,h值达到最大,可认为此时两者距离很近,信号几乎没有衰减。随着接收机和声源深度差的增大,在水平距离不变的情况下,h也变小。同时在节点与声源的深度不变时,随着水平距离的增大,h值也在变小。将声源位置在500 m深时的传递函数等高线图画出来,如图4所示。
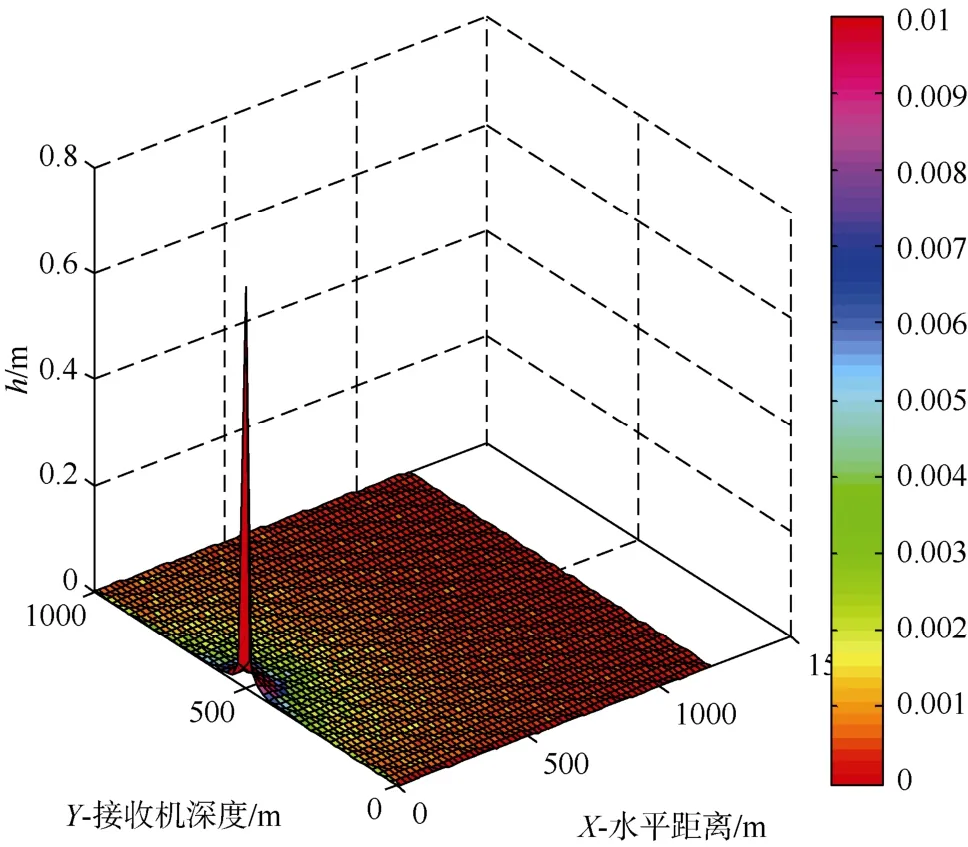
图3 传递函数h切面图Fig. 3 Sectional drawing of transfer function h
由图1水下声线Munk图可知,声线的疏密表征声能的密度,声线会聚的地方声强大,声线发散的地方声强小,将图4传递函数等高线图与图1比较可以发现,传递函数的变化与水下声强的变化一致,从而可以说明传递函数h的最大值能直观表示海洋声场的分布,即可以用传递函数最大值h模拟水下声场的声速变化。
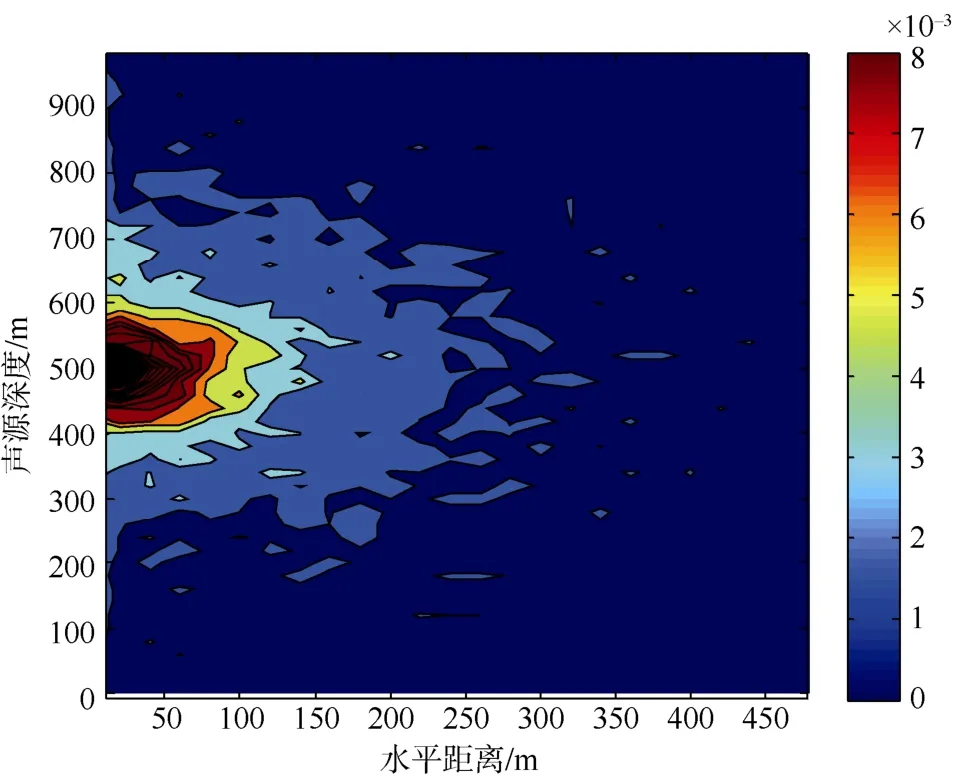
图4 声源在500 m深时传递函数等高线图Fig. 4 Contour map of transfer function with the sound source at a depth of 500m
2 单个声源海洋环境节点最优布局
在证明了可以用传递函数的最大值模拟海洋环境后,先来研究单个声源在BELLHOP模型下的传感器节点最优布局。考虑到仿真效果是否便于观察规律,选择在二维剖面加入水下声场环境模型,这样更容易研究和总结规律。首先考虑的是单个声源在BELLHOP模型下的节点最优布局。
选择在BELLHOP的*.env文件中设置声线条数31条和161条2种声线条件下进行布局研究,分别模拟了声线数少和多2种情况下的海洋环境。假定声源位置在(500 m,500 m)处,选取5个传感器节点采用自适应遗传算法[7-9]进行最优布局。仿真参数如下:
1)节点数目:5;
2)测试区域:1 km×1 km(0~1 000 m水深)的测试区域;
3)信号参数:fc=600 Hz,Ts= 0.005 s,B =700 Hz,信号1 m处的信噪比为SNR=70;
4)自适应遗传算法:种群规模为 100,最大迭代次数为 1 000次,初始交叉概率 pc1=0.9,pc2=0.6,变异概率pm1=0.1,pm2=0.01。
① 声线数为31时的优化布局。
将声源放置于声线图中,由于此时的声源为各向同性点源,所以在*.env文件中设置发射角度为-180°~180°,此时声源位于500 m的深度,在声线图中声源的位置坐标为[500 m,500 m],节点数目为5时的节点最优布局如图5。
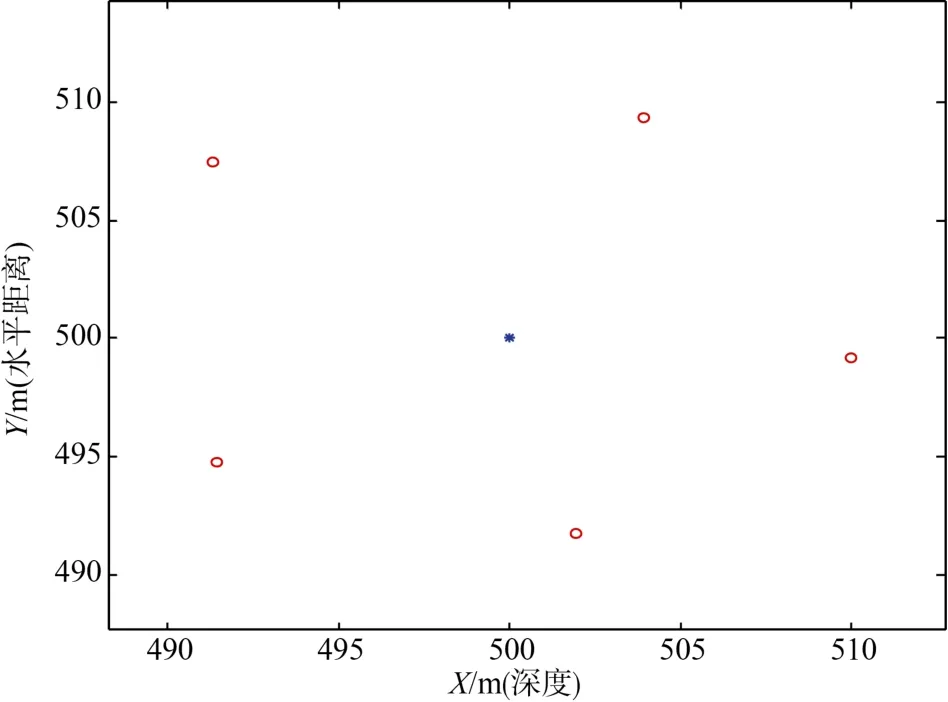
图5 声线条数为31时的5个节点最优布局图Fig. 5 Optimal layout of 5 nodes when the number of sound ray is 31
将以上仿真得到的节点最优布局位置画在声线图上,如图6,可以看出,最优布局时的5个节点坐标都位于声线上。
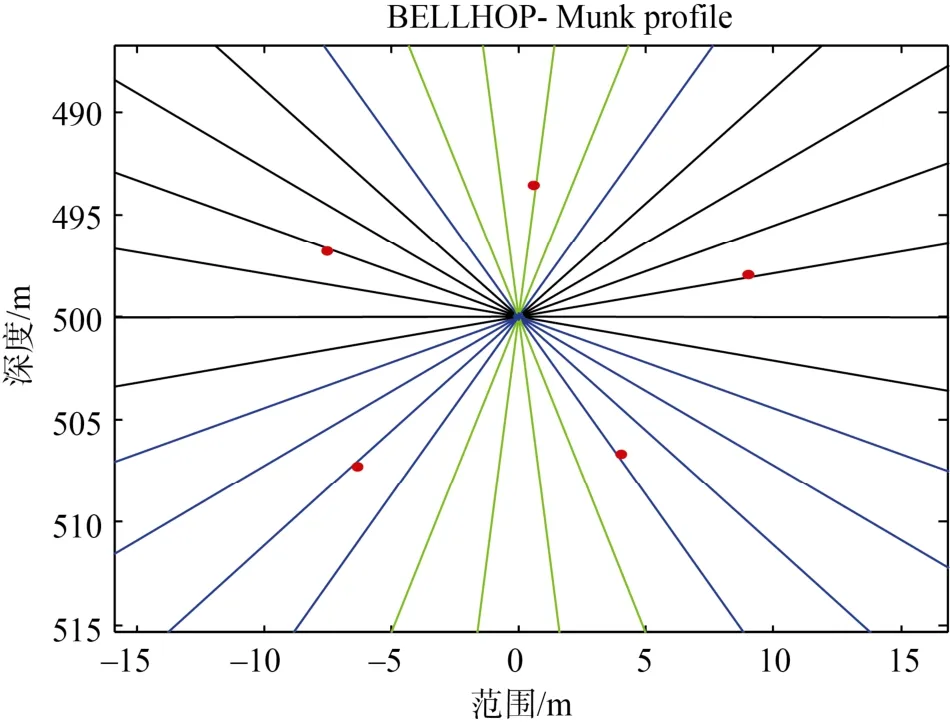
图6 声线条数为31时候节点在声线图上的位置Fig. 6 Position of nodes on sound-ray diagram when the number of sound ray is 31
② 声线数为161时的优化布局。
其他条件不变,将声线条数改为161条,最优节点布局与声线图分别如图7和图8所示。
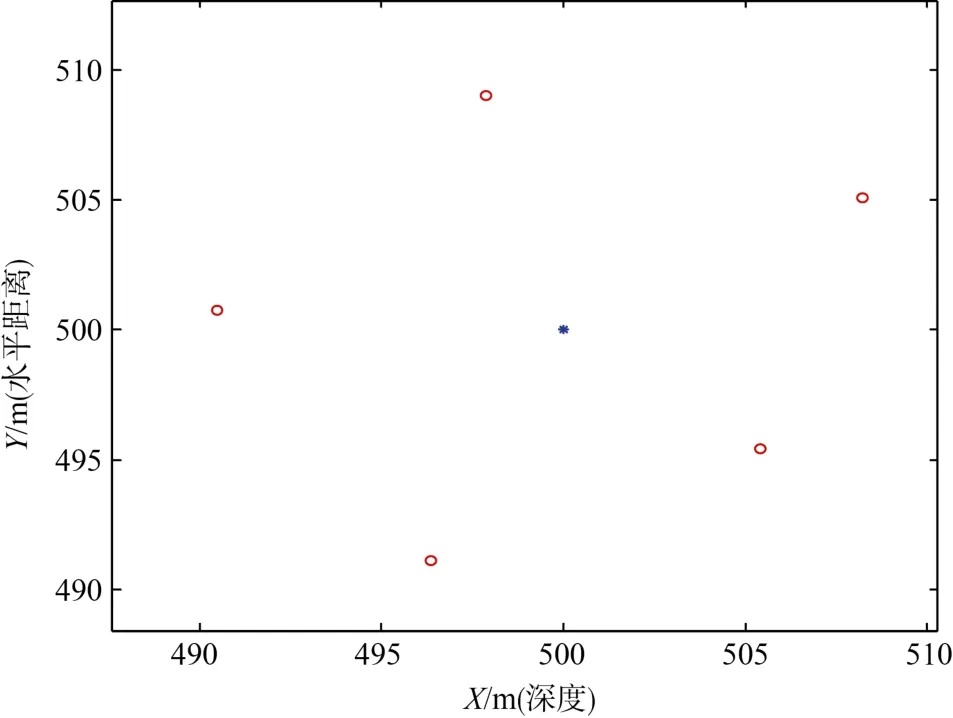
图7 声线条数为161时的5个节点最优布局图Fig. 7 Optimal layout of 5 nodes when the number of sound ray is 161
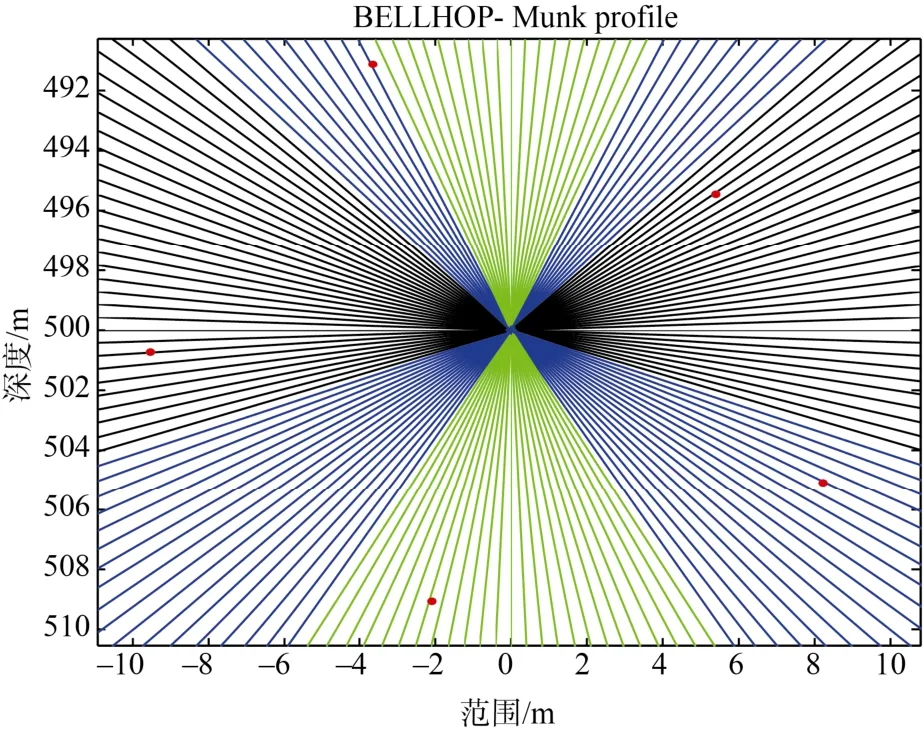
图8 声线条数为161时候节点在声线图上的位置Fig. 8 Position of nodes on sound-ray diagram when the number of sound ray is 161
由图7-8可知,无论声线数目多少,遗传算法最优布局出的节点位置始终位于声线上。表明在声线数目选择合理的情况下,无论声线数目多少,最优布局结果是一致的。这是由于在阵元接收端选择的是声源直达信号,与其他信号无关。
3 均匀分布声源海洋环境节点最优布局
当声源是单一的点源时,验证了无论声线数目多少,最优布局时的传感器节点总是位于声线上。但是实际情况中,单一声源的应用范围很小,所以要重点研究的是声源出现概率为均匀分布时的节点布局情况。在1 km×1 km的测试区域进行加入海洋声场信息的最优布局仿真和误差分布仿真。在本文中为了验证算法的正确性引入了均匀场(即不加声线)中基于TOA算法[10-11]的三维节点定位最优布局[12]分析作为对比。

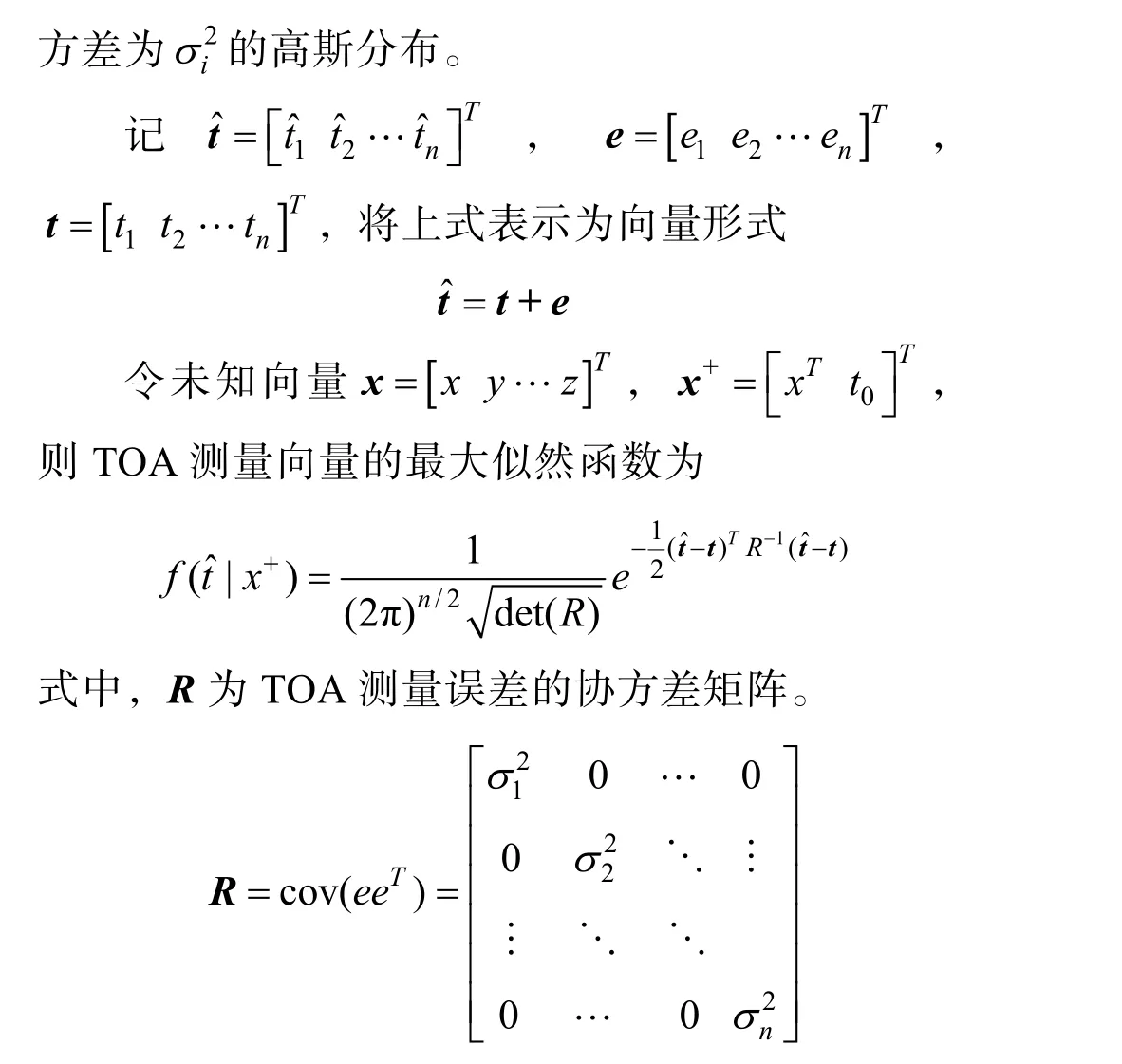
则似然函数最大时的向量即为估计的声源位置。
利用上述的TOA定位算法,导出节点对目标的观测性能与定位误差CRLB的关系,给出节点与目标相对位置的不同造成的定位误差的变化理论解析关系。
估计误差的CRLB的迹为
对于已知节点数目及声速的定位系统,测试区域某一点的定位误差主要受声源到传感器矢量的方向以及节点探测性能的影响。对于一个信号带宽为B,Hz;中心频率为fc,Hz;信号的持续时间为Ts,s;的CRLB为

式中,SNRi为节点 si处的信噪比,与声源到传感器节点的距离平方成反比,即

SNR为信号1 m处的信噪比。则第i个节点的TOA估计方差可表示为

由此可以看出,节点的观测性能对定位性能的影响体现在声源到传感器节点的距离,这对布局产生了很大的影响,直接导致最优布局与以往的结论产生较大的差异。
3.1 均匀场和加入海洋环境的最优布局对比
由于节点的观测性能对定位性能的影响体现在声源到传感器节点的距离,因此,当目标出现在测试区域内的各个位置的概率相等时,将测试区域按照10 m的间隔划分网格,网格的交点为所有可能的声源位置。采用自适应遗传算法进行迭代寻优,当选取节点数目为 20个时,仿真得到节点最优布局如图 9所示。此时的节点观测性能差异由声源到传感器节点的距离所决定。
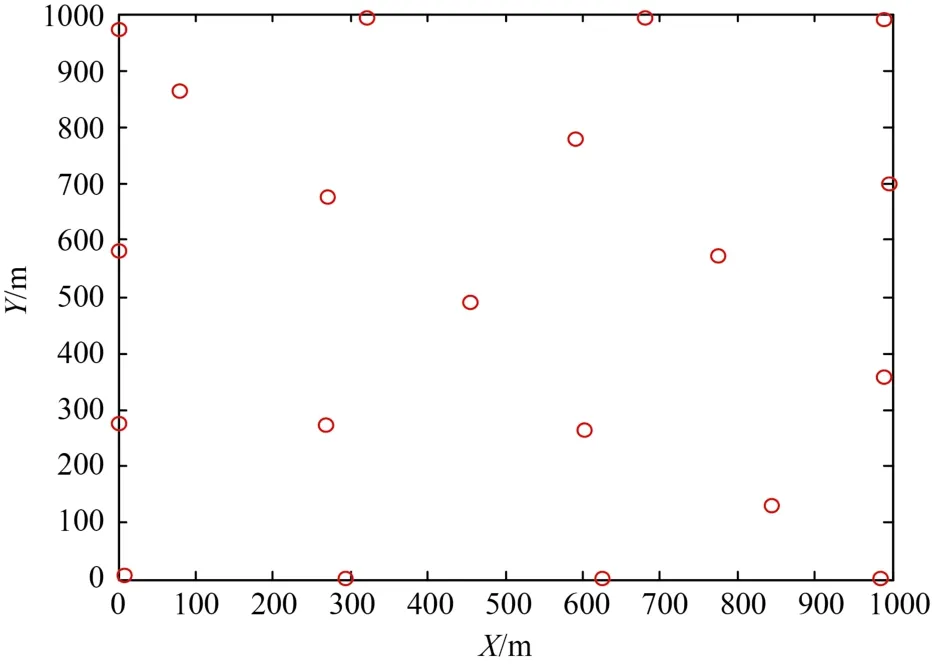
图9 遗传算法最优布局Fig. 9 Optimal layout of genetic algorithm
但是由于水声信道的复杂性,在海洋环境中的节点观测性能差异并不能仅仅由声源到传感器的距离决定,在此处利用BELLHOP模型中的参数设置,寻找从声源到各个阵元间的直达声线,其用时最短,找到对应的幅度信息,就可求得直达路径的传递函数,将该传递函数与发射信号做卷积即可得到直达信号。将此直达信号作为阵元处的接收信号,由此可得接收端各个阵元的噪声误差。同样以目标出现在测试区域内各个位置的概率相同时,将测试区域按照10 m的间隔划分网格,将网格的交点作为可能的声源位置,采用自适应遗传算法对海洋环境中节点进行最优布局。由于在三维海洋环境中的声速剖面等因素只与海洋深度相关性较大,所以在此处为了突出深度的变化对节点优化布局产生的影响,只考虑三维海洋环境中的YZ面的剖面上的节点布局情况。此时X轴表示声源和传感器的深度值(原来三维空间中的 Z值),Y轴表示声源与传感器的水平距离(原三维空间中的水平距离
分别分析在声线数目较多和较少的情况下考虑整体观测区域最优布局问题,设声线数分别为31条和161条作为代表,根据BELLHOP中的海洋环境参数与自适应遗传算法相结合得到的最优布局如图10和图11所示。
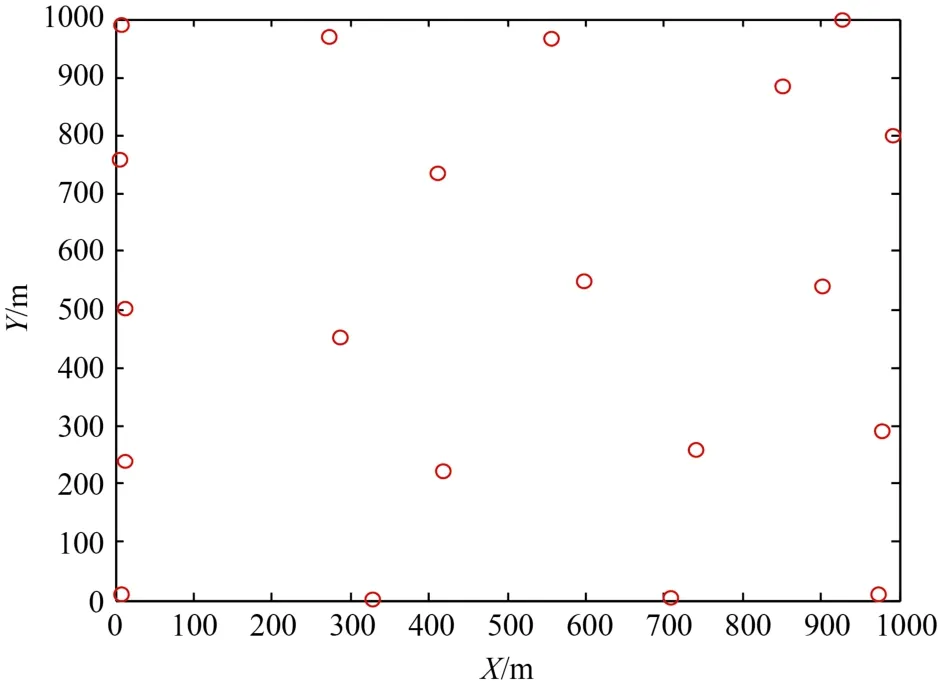
图10 31条声线的自适应遗传算法最优布局Fig. 10 Optiaml layout of 31 sound rays with adaptive genetic algorithm
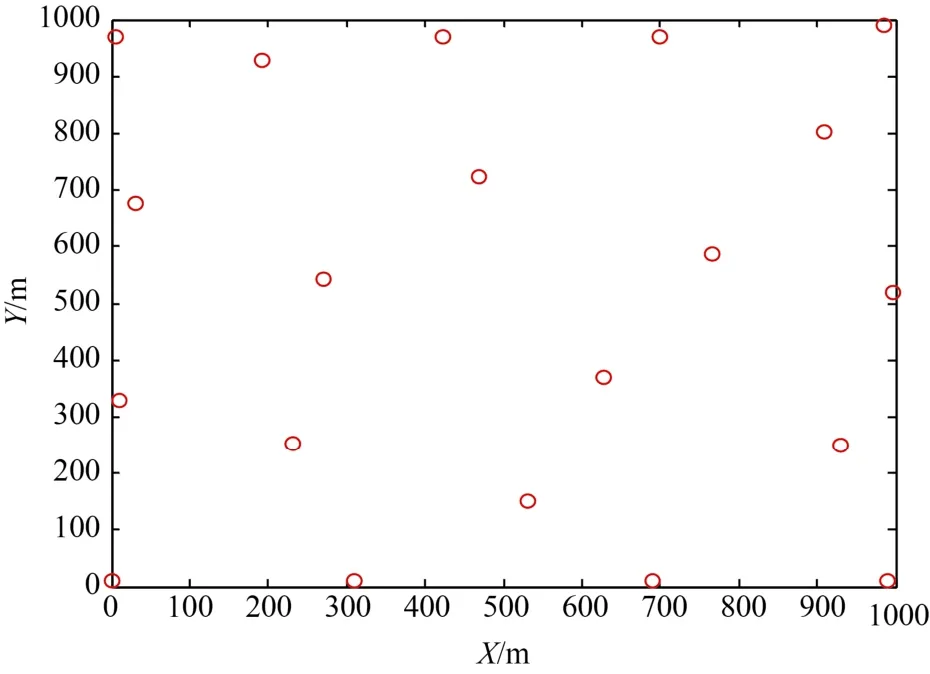
图11 161条声线的自适应遗传算法最优布局Fig. 11 Optiaml layout of 161 sound rays with adaptive genetic algorithm
仿真条件如下:
1)节点数目:20;
2)声源:测试区域按照 10 m为间隔划分为101*101=10 201个可能位置;
3)测试区域:1 km×1 km(0~1 000 m水深)的测试区域;
4)信号参数:fc=600 Hz,Ts= 0.005 s,B =700 Hz ,信号1 m处的信噪比为SNR=70;
5)自适应遗传算法:种群规模为 200,最大迭代次数为 1 000次,初始交叉概率 pc1= 0 .9,pc2= 0 .6,变异概率 pm1=0.1,pm2= 0 .01。
3.2 均匀场和加入海洋环境的误差分布对比
若是将20个节点同时放置于1 000 m×1 000 m的海洋区域内,为了消除边界效应,假设声源出现于 X=[100 900]与 Y=[100 900]的区域内,按照10 m的间隔划分网格,网格的交点为所有可能的声源位置。按照均匀场条件下TOA定位算法所得最优布局的节点坐标,得出在此最优布局下的整体CRLB分布图,如图12,最优布局时的误差分布如图13和14所示。
由图12-14可知,只考虑节点到传感器距离所得到的均匀场时最优布局的误差整体高于用本文方法所得最优布局,由图13-14可知,采用本文方法所得最优布局时的误差,整体较小,且不论声线数目多少,其整体CRLB误差部分图整体趋势大致相同。
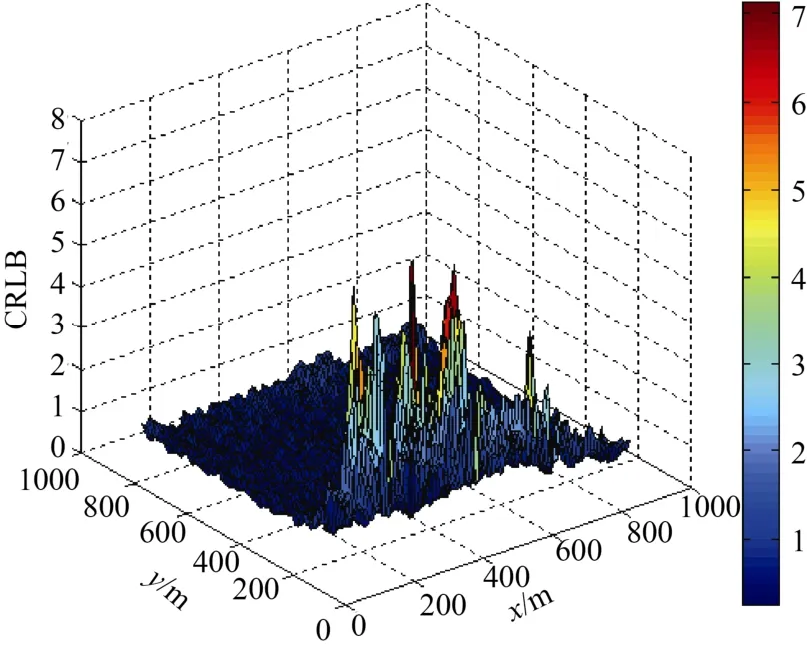
图12 基于均匀场的自适应遗传算法的最优布局误差分布Fig. 12 Optimal layout error distribution of adaptive genetic algorithm based on uniform field
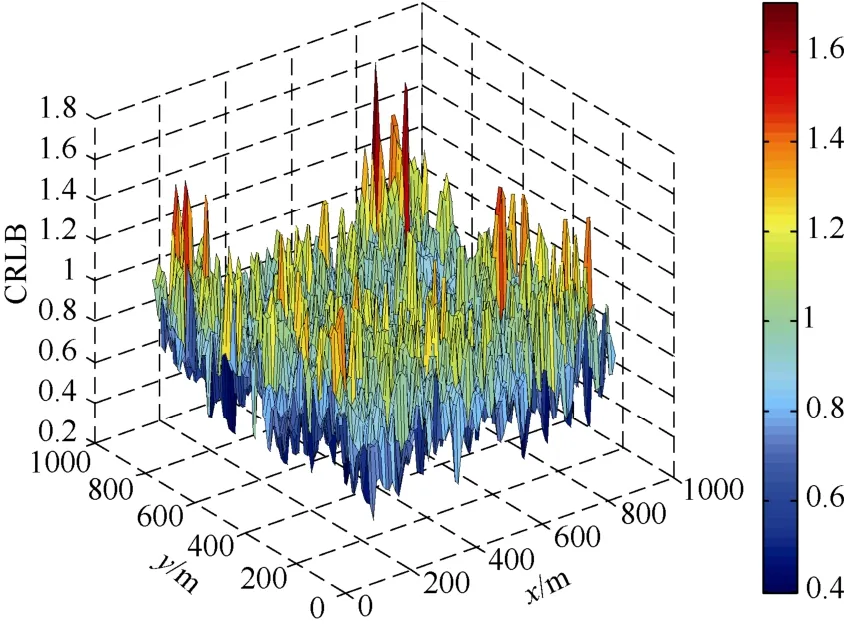
图13 基于BELLHOP中31条声线的自适应遗传算法最优布局误差分布Fig. 13 Optimal layout error distribution of adaptive genetic algorithm based on 31 sound rays in BELLHOP
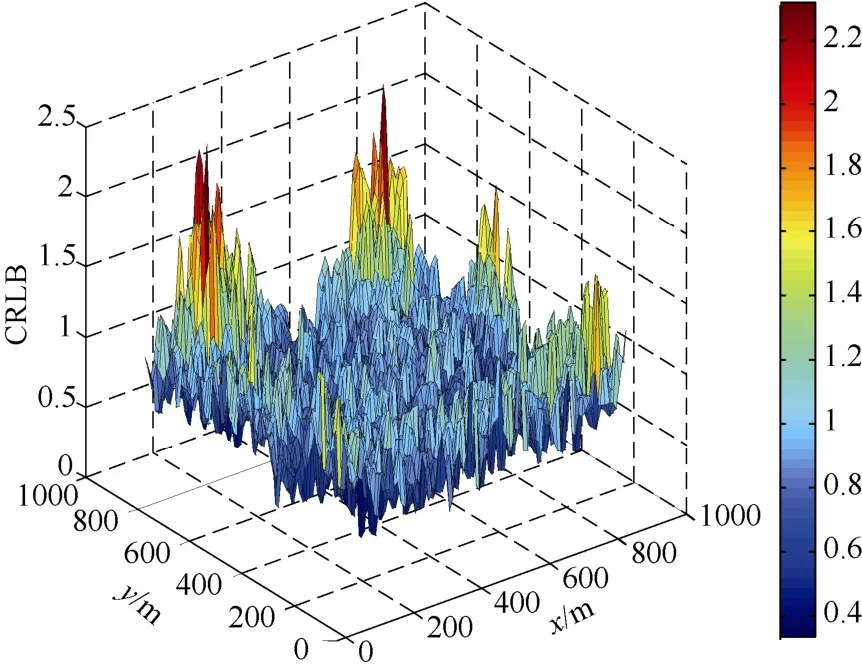
图14 基于BELLHOP中161条声线的自适应遗传算法最优布局误差分布Fig. 14 Optimal layout error distribution of adaptive genetic algorithm based on 161 sound rays in BELLHOP
通过表3可以得到3种布局下的平均CRLB,由此表格可知,采用均匀场的最优布局时的平均误差远高于本算法得到的平均误差。而且后2种布局平均误差值一致,表明在声线数目选择合理的情况下,无论声线数目多少,最优布局结果是一致的。这是由于在阵元接收端选择的是声源直达信号,与其他信号无关。仿真结果同时验证了本方法有效地模拟了海洋环境特征。
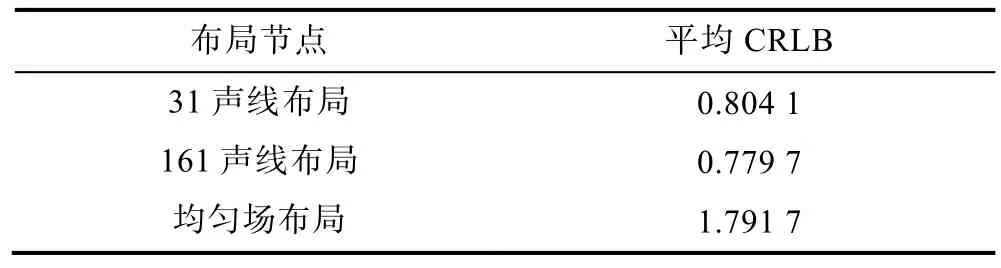
表3 不同情况下的平均CRLBTable 3 Average CRLB under different conditions
为了得到三维海洋环境中的节点优化布局,设置三维海洋环境中的观测区域为X轴和Y轴分别为0~800 m,Z轴为300~500 m。假定目标出现在观测区域内的各个位置概率相等,按照10 m的间隔划分网格,网格的交点为所有可能声源的位置。选取节点数目为30个,在三维海洋环境中采用自适应遗传算法进行迭代寻优,仿真得到的节点最优布局如图15所示。
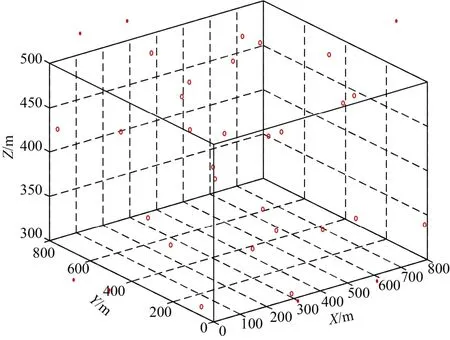
图15 三维最优布局图Fig. 15 Three-dimensional optimal layout
由图15可知,最优布局时的30个节点基本都围绕在深度为 300~500 m 之间的声源分布的区域内,仅有极少数节点处于此区域外部且紧邻此区域。由此可知,自适应遗传算法也适用于解决三维海洋环境中的最优节点布局问题。
4 结束语
仿真结果说明了传递函数h的最大值能直观表示海洋声场的分布;并且验证了加入的海洋模型能有效减小在其最优布局下的平均CRLB。在涉及对水下传感器网络节点进行布局时,可以按照本文讨论的仿真结果进行布局,提高了被动定位系统的定位精度,有效减小了系统误差。同时证明了自适应遗传算法也适用于解决三维海洋环境中的最优节点布局问题。
