基于改进帧间差分法与背景差分法车辆检测
2021-07-03韩帅
韩帅
(201620 上海市 上海工程技术大学 机械与汽车工程学院)
0 引言
近些年来,运动目标的检测,尤其是运动车辆的检测的发展和应用非常广泛。运动目标检测就是从图像序列中检测出运动目标。目前,运动目标的检测主要方法有背景差分法、帧间差分法、光流法3 种[1]。本文对视频中动态场景的运动车辆进行实时检测,解决目标轮廓缺失、背景无法实时更新的问题[2]。本文提出了改进的三帧间差分法与背景差分法相融合的算法。
1 帧间差分法
1.1 二帧间差分法
帧间差分法是基于运动图像序列中相邻两帧图像间具有强相关性而提出的检测方法[3],这种检测方法对光照变化不敏感,非常适合动态变化的环境,而且运算简单,检测速度快,车辆定位准确,适用于实时性要求较高的场景。
传统的帧间差分法,即二帧间差分法的基本原理如下:

式中:Gk(x,y)——结果图像;Pk(x,y)——第k 帧图像;Pk-1(x,y)——第k-1 帧图像。
由于摄像机采集的视频图像具有连续性的特点,如果场景内不存在运动的物体,则连续帧之间的变化很微弱,如果存在运动目标,则变化较明显[4]。二帧间差分法算法简单,受光线影响小,但它仍然存在以下几个缺点:首先,它不能检测出静止或运动速度过慢的物体,对于高速运动的物体又会使得分割区域远远大于真实目标,其分割区域与目标运动速度相关[5];其次,如果物体内部的灰度比较均匀,相邻帧差可能在目标重叠部分形成空洞,严重时造成分割结果不连通,不利于进一步的物体分析与识别[6]。
因此,本文提出了改进的三帧间差分法来解决传统帧间差分法中存在的问题。
1.2 三帧间差分法
当目标物体运动速度过快时,二帧间差分法所得图像便会出现重影、目标区域过大等问题[7],因此,提出了三帧间差分法来改善图像的处理效果。其基本原理是把原来利用两帧获取结果图像的方法,改进为利用相邻三帧来实现目标的检测。其流程图如图1 所示。
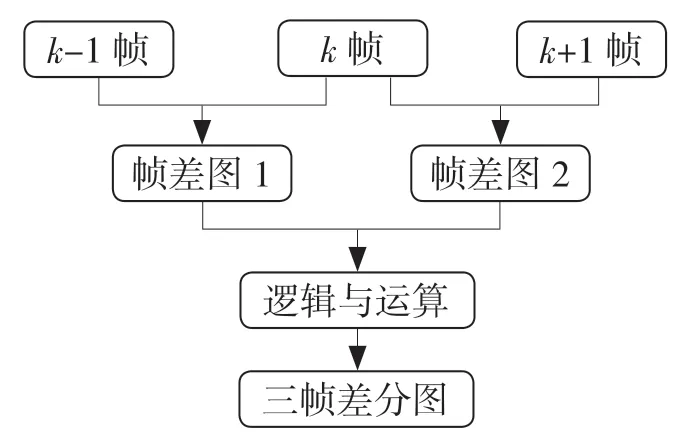
图1 三帧间差分法流程图Fig.1 Flow chart of three-frame difference method
首先,分别得到第k 帧与k-1 帧的差分图和第k+1 帧与k 帧的差分图,然后将灰度图像转化为二值图像,最后将所得的二值差值图进行“与”运算得到最终的结果。
其公式原理如下:

式中:Gk(x,y)——结果图像;Pk(x,y)——第k 帧图像;Pk-1(x,y)——第k-1 帧图像;Pk+1(x,y)——第k+1 帧图像。
在帧间差分法中,阈值 T 的选择非常重要。如果阈值T 选取的值太小,则无法抑制差分图像中的噪声;如果阈值T 选取的值太大,又有可能掩盖差分图像中目标的部分信息;而且,固定的阈值T 无法适应场景中光线变化等情况[8]。
为了使运动目标与背景之间的差异更加明显,使用最大类间方差法(也叫Otsu 算法)来实现这一目标[9]。该算法是在灰度直方图的基础上采用最小二乘法原理推导出来的,具有统计意义上的最佳分割[10]。它的基本原理是以最佳阈值将图像的灰度值分割成两部分,使两部分之间的方差最大,即具有最大的分离性。
1.3 改进三帧间差分法
由于三帧间差分法得到的效果图,往往会出现图像内部含有空洞、图像轮廓部分缺失等问题。本文提出了改进的三帧间差分法,对第k 帧图像采用边界定位精度高、抗干扰能力强、连续性好的拉普拉斯算子来检测其边缘[11],然后将三帧间差分法效果图与第k 帧边缘图进行“与”运算,得到改进的三帧间差分法效果图。此即为本文提出的改进的三帧间差分法,其具体流程图如图2所示。
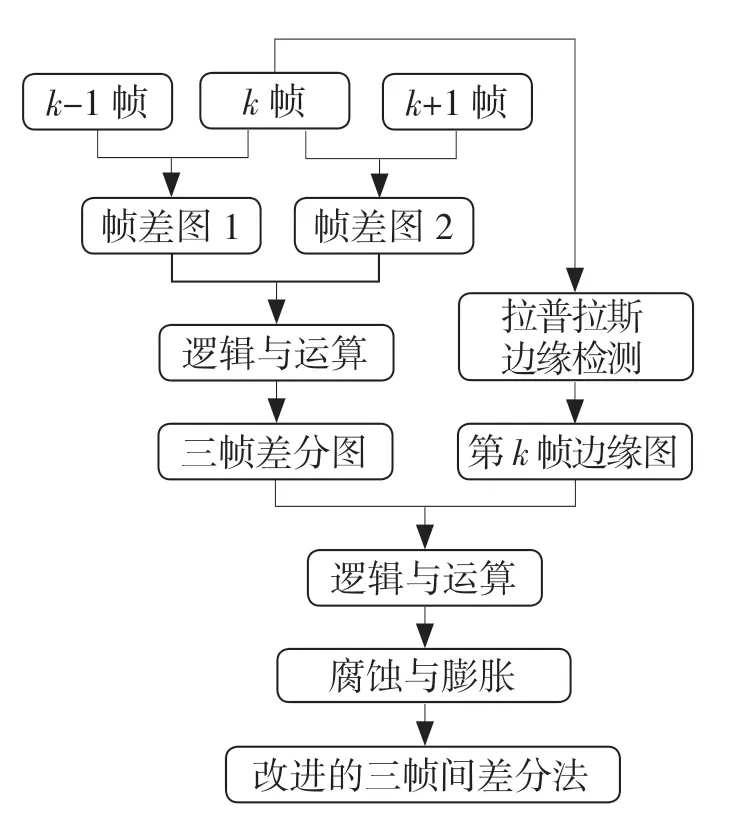
图2 改进三帧间差分法流程图Fig.2 Flow chart of improved three-frame difference method
改进的三帧间差分法算法如下:
首先,运用上述传统的三帧间差分法,分别得到第k 帧与k-1 帧的差分图和第k+1 帧与k 帧的差分图,并将灰度图像转化为二值图像,将所得两幅帧差图进行“与”运算得到传统三帧间差分法的二值图。其次,对第k 帧图像利用拉普拉斯算子进行边缘检测,其实质就是使图像的边缘突出。
由于拉普拉斯是一种微分算子,具有旋转不变性,它的应用可增强图像中灰度突变的区域,减弱灰度的缓慢变化区域[12],因此,锐化处理可选择拉普拉斯算子对原图像进行处理,产生描述灰度突变的图像,再将拉普拉斯图像与原始图像叠加而产生锐化图像。拉普拉斯锐化的基本方法可以由式(3)表示:

其近似表达式为

最后,将所得到的三帧间差分法的效果图与第k 帧拉普拉斯边缘图进行“与”运算,便得到本文提出的改进的三帧间差分法二值图。
2 背景差分法
背景差分法首先选取背景中的一幅或几幅图像的平均作为背景图像,然后把以后的序列图像当前帧和背景图像相减,进行背景消去。若所得到的像素数大于某一阈值,则为运动目标区域,反之则为背景区域[13]。其对复杂背景下的运动物体检测效果较好,计算量小。缺点是受光线、天气等外界条件的影响较大[14]。
2.1 混合高斯背景建模
混合高斯背景建模是基于像素样本统计信息的背景表示方法,利用像素在较长时间内大量样本值的概率密度等统计信息(如模式数量、每个模式的均值和标准差)表示背景[15],然后使用统计差分(如3σ原则)进行目标像素判断,可以对复杂动态背景进行建模,计算量较大。
在混合高斯背景模型中,认为像素之间的颜色信息互不相关,对各像素点的处理都是相互独立的。对于视频图像中的每一个像素点,其值在序列图像中的变化可看作是不断产生像素值的随机过程,即用高斯分布来描述每个像素点的颜色呈现规律(单模态(单峰),多模态(多峰))。
对于多峰高斯分布模型,图像的每一个像素点按不同权值的多个高斯分布的叠加来建模,每种高斯分布对应一个可能产生像素点所呈现颜色的状态,各个高斯分布的权值和分布参数随时间更新。当处理彩色图像时,假定图像像素点R,G,B 三色通道相互独立并具有相同的方差。对于随机变量X 的观测数据集{x1,x2,…,xN},xt=(rt,gt,bt)为t 时刻像素的样本,则单个采样点xt其服从的混合高斯分布概率密度函数:
式中:k——分布模式总数;η(xt,μi,t,τi,t)——t时刻第i 个高斯分布;μi,t——其均值;τi,t——其协方差矩阵;δi,t——方差;I——三维单位矩阵;wi,t——t 时刻第i 个高斯分布的权重。
2.2 参数设定
每个新像素值xt同当前k 个模型按式(8)进行比较,直到找到匹配新像素值的分布模型,即同该模型的均值偏差在2.5σ内:

若所匹配的模式符合背景要求,则该像素属于背景,否则属于前景。各模式权值按式(9)更新,其中α是学习速率,对于匹配的模式Mk,t=1,否则Mk,t=0,然后各模式使得权重进行归一化:

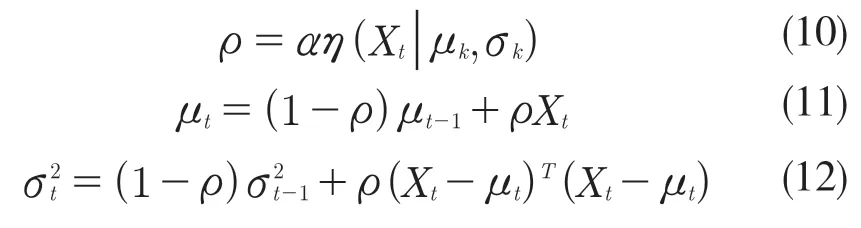
若未匹配成功,其均值μ和标准差σ均不变,匹配模式按式(10)—式(12)更新:
3 算法实现及实验结果
本文基于MATLAB 来实现运动车辆的实时监测。其具体流程图如图3 所示。
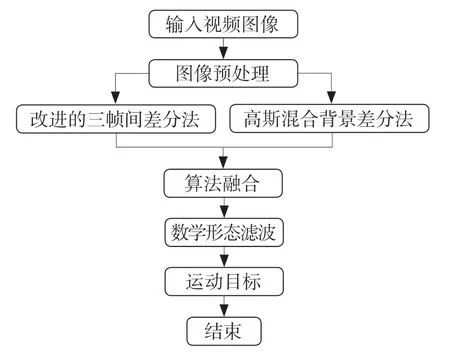
图3 实验流程图Fig.3 Flow chart of the experiment
3.1 预处理
三通道数据形式较复杂、占用存储空间大、计算速度慢,因此通常将三通道数据转化为单通道数据,即灰度化。
灰度化就是将每个像素点的RGB 值统一成同一个值,本文采用加权平均法,根据RGB 三通道的数值进行加权计算得到[16]。坐标为(x,y)的像素点进行灰度化操作的具体计算公式如下:

灰度化处理后的图像中还是含有大量的噪声。中值滤波采用非线性的方法,它在平滑脉冲噪声方面非常有效,同时它可以保护图像尖锐的边缘[17]。
利用中值滤波去除运动车辆二值图当中细微的噪声[18],在坐标点(x,y),大小为m×n 的窗口表示为Sxy,中值滤波是选取窗口Sxy中被干扰图像g(x,y)的中值,作为坐标点(x,y)的输出,公式为

式中:g(x,y)∈ Sxy
图4 是经过灰度化与滤波处理后的效果图。

图4 第k 帧滤波图Fig.4 Filter image of k frame
3.2 各算法效果图
图5 是传统的三帧间差分法的效果图;图6(a)是利用拉普拉斯算子检测的运动目标边缘图,图6(b)为本文所提出的改进的三帧间差分法;图7(a)是混合高斯背景差分法的二值图,图7(b)是本文所提出算法的效果图。
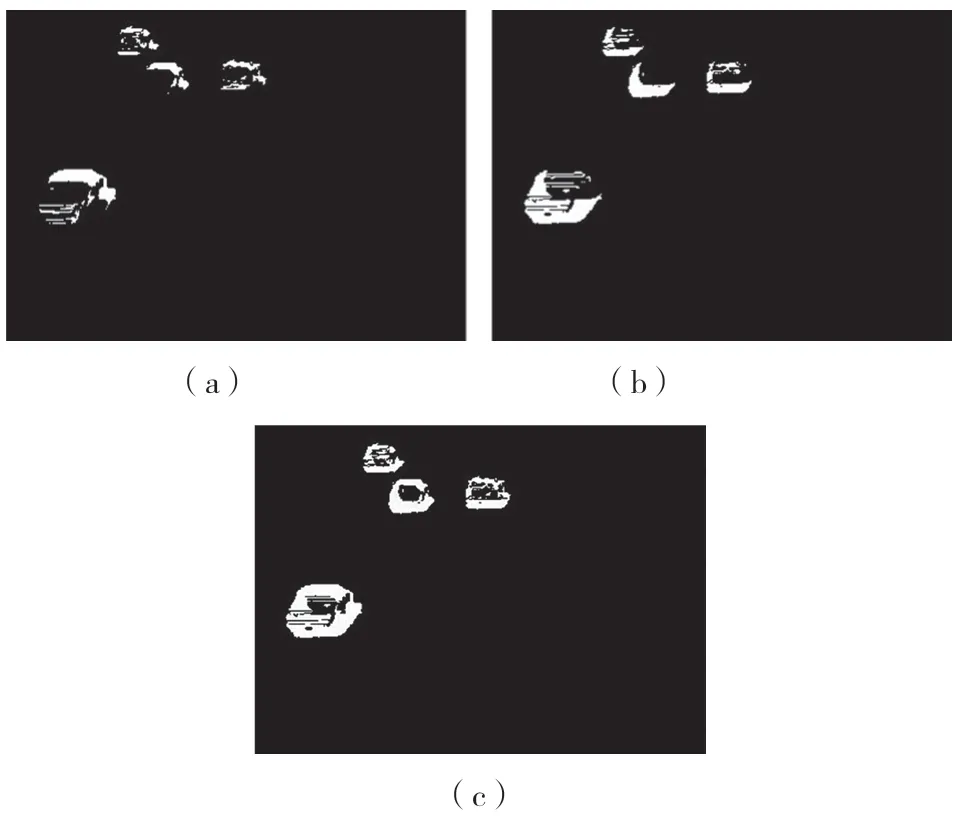
图5 三帧间差分法Fig.5 Image of three-frame difference method
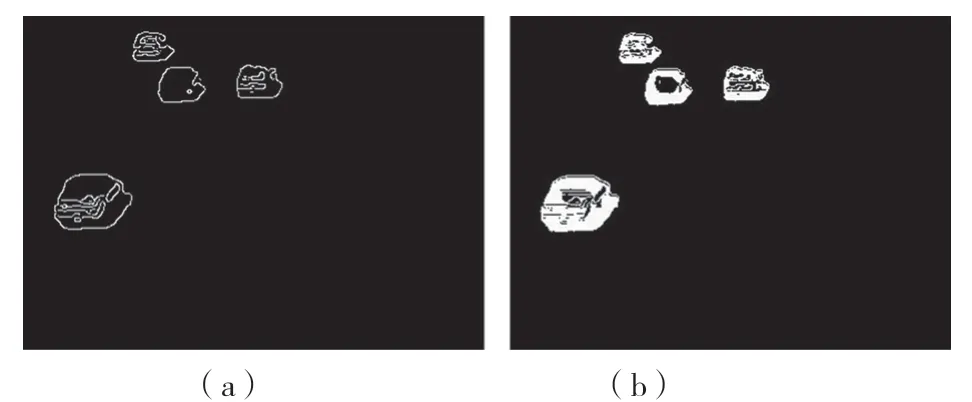
图6 改进三帧间差分法效果图Fig.6 Effect image of improved three-frame difference method
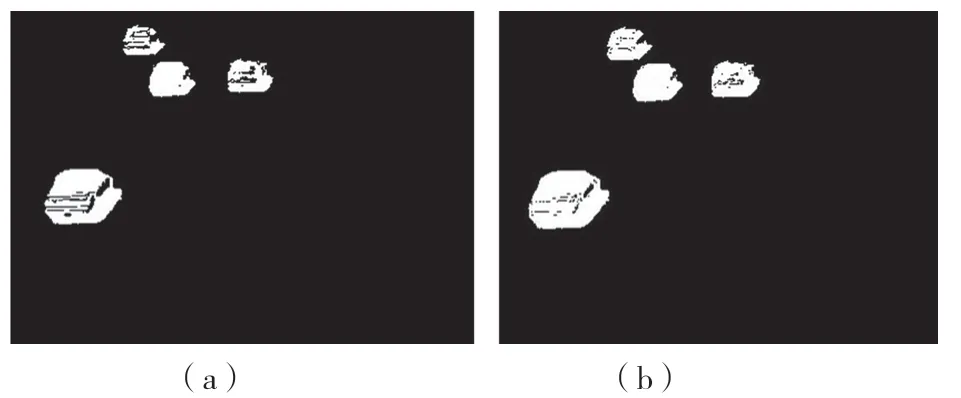
图7 背景差分法与本文算法对比图Fig.7 Comparison of background difference method and this algorithm
(a)k 帧与k-1 帧差值 (b)k+1 帧与 k 帧差值(c)三帧间差分法二值图
(a)第k 帧拉普拉斯边缘检测图(b)改进三帧间差分法二值图
(a)背景差分法二值图(b)本文算法二值图
3.3 后处理
为了使运动目标二值图的轮廓更加清晰并去除内部空洞,需要对本文算法所得二值图进行后处理。
对所得二值图进行数学形态滤波,这里采用膨胀算法来解决这一问题。膨胀是将与物体接触的所有背景点合并到该物体中,使边界向外部扩张的过程。通过膨胀,可以填充图像中的小孔以及在图像边缘处的小凹陷部分。结构元素B 对图像A 的膨胀,记作A⊕B,定义为

图8 是本文算法的膨胀图与传统三帧间差分法膨胀图的对比。

图8 两种膨胀图对比Fig.8 Comparison of two inflated images
(a)三帧间差分法膨胀图(b)本文算法膨胀图
4 结论
本文将改进的三帧间差分法与高斯混合建模的背景差分法相融合,实现两者的优势互补,解决了传统帧间差分法中物体轮廓缺失、目标内部有空洞以及速度过慢时目标缺失的问题,也弥补了传统背景差分法无法实时更新背景的缺点。本文的算法,能够较好地通过预处理抑制视频图像中的噪声,并利用算法的融合消除目标的空洞、补全目标轮廓、实现背景实时更新,在车辆运动过程中实现较好的目标检测效果。
