高分多模卫星微振动抑制设计与验证
2021-07-03高行素王光远管帅杨文涛张国斌范立佳赵煜罗文波
高行素 王光远 管帅 杨文涛 张国斌 范立佳 赵煜 罗文波
(1 中国空间技术研究院遥感卫星总体部,北京 100094) (2 北京空间飞行器总体设计部,北京 100094)
高分多模卫星(GFDM-1)是在中型敏捷遥感卫星公用平台(ZY2000 Remote Sensing Satellite Platform)基础上研制的光学遥感卫星,具有分辨率高、机动性强、成像模式多等特点。为实现敏捷机动功能,高分多模卫星配置了5台大力矩控制力矩陀螺(Control Moment Gyroscope ,CMG)。卫星在轨运行期间,CMG和太阳翼驱动机构(Solar Array Drive Assembly,SADA)、天线驱动机构等运动部件会引起微振动,光学相机成像质量对微振动非常敏感[1-3]。为了满足卫星任务需求,必须对星上微振动进行抑制。
针对卫星微振动抑制需求,国内外都开展过大量研究与卫星应用。目前国外先进遥感卫星平台基本都应用了隔振技术,用于改善有效载荷工作环境。以世界观测(Worldview)系列高分辨率观察卫星为代表的美国高分辨率遥感卫星平台,应用了Honeywell公司的微振动隔离系统(Micro Vibration Isolation System,MVIS)隔振系统,用于提高对地观测系统的成像精度。NASA的兰利研究中心、戈达德航天中心的载荷隔离等微振动抑制技术,已成功应用于相关卫星,并取得了较好的减振效果。我国的高分七号卫星,采用CMG隔振装置对微振动进行抑制,有效保障了亚米级分辨率的实现[4]。以上各项微振动抑制研究与应用,均对敏捷型遥感卫星的微振动抑制设计与验证有一定借鉴意义。
本文针对高分多模卫星微振动抑制需求,提出了“CMG群整体隔振+有效载荷隔振”两级隔振的微振动抑制方案,重点开展了扰动源、星体结构、敏感载荷等关键环节的微振动抑制设计与验证,并通过在轨微振动对微振动抑制方案进行了在轨验证。
1 微振动抑制技术路线
高分多模卫星微振动抑制技术路线如图1所示。

图1 微振动抑制技术路线Fig.1 Micro-vibration attenuation technology roadmap
基于卫星平台和典型光学载荷微振动抑制需求,提出“CMG群整体隔振+有效载荷隔振”两级隔振的微振动抑制方案;分解得到了微振动传递全链路各环节的微振动指标;系统梳理了平台各类活动部件的扰动特性,通过CMG扰动测试获取了CMG扰动特性;完成了并联隔振装置设计和并联隔振装置微振动试验,验证了其隔振性能;开展了系统级微振动试验,对卫星微振动抑制能力进行了系统级的评估与验证;建立了系统级微振动分析模型,开展了在轨微振动响应及成像质量预示。
2 微振动抑制总体方案
2.1 敏感载荷需求分析
对于光学相机,微振动传递至相机结构后,引起相机的动力学响应,其响应的形态和幅度,与自身的力学特性直接相关[5]。通过动力学响应分析或试验,可获得特定频率下相机的响应模式,进而得到该模式下各光学元件的相对运动[6]。在给定激励频率和激励幅值后,即可得到各光学元件相对运动的完整规律。光学元件的相对运动所引起的像移分析,相对于相机整体运动而言,更为复杂。这与相机的光学系统设计直接相关。对于复杂光学系统,像移量对不同镜面的运动量敏感度有较大差异。因此,在通过力学分析或试验获得各光学元件的运动规律后,还须将其代入光学模型分析光路的变化情况,进而确定像移量,定量分析成像质量的退化程度。在对微振动抑制设计进行分析或试验验证时,需要通过光机耦合分析才能最终定量确定成像质量受影响的程度[7-9]。
一般根据光学系统焦距、地面像元分辨率、像元尺寸、积分时间等主要参数,对微振动抑制需求进行分析,主要集中在以下三个方面。
(1)微振动造成光学相机的绝对运动造成的视轴指向(Line of Sight,LOS)晃动;
(2)微振动造成光学相机内部光学器件相对运动照成的LOS晃动;
(3)微振动造成的图像畸变。
其中第(1)项相机整体运动引起的LOS晃动造成的像移,可由相机的基本参数直接计算得到。而对于后两项相机内部各光学元件间相对运动引起的像移,则需要开展相机结构特性、光学系统特性的耦合分析。
经分析高分多模卫星有效载荷对微振动抑制的指标要求如下:①当采取微振动抑制措施时,相较于不采取微振动抑制措施时,传递至有效载荷安装界面的微振动响应衰减80%以上;②在成像积分时间内,微振动引起的相机视轴指向抖动不超过0.1像元。
2.2 微振动传递路径
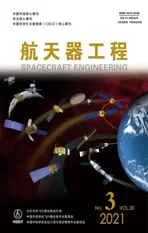
微振动抑制设计是通过对传递路径的调整和适配,使扰动能量耗散或重新分配,从而降低由扰动源激励产生的有效载荷振动响应幅值[10]。卫星的运动或变形导致的像移主要包括两种模式,卫星的姿态扰动,导致星体的低频晃动,从而使相机的指向发生变化,形成像移。星上活动部件的运动形成扰动力,导致卫星结构振动,从而引起相机的整体抖动,导致光轴指向变化,或相机内部光学元件局部抖动导致光路变化,都会引起像移。航天器姿态变化带来的视轴指向晃动,可利用控制系统的姿态稳定度指标对其约束。由此得到卫星微振动对成像质量影响链路如图2所示。
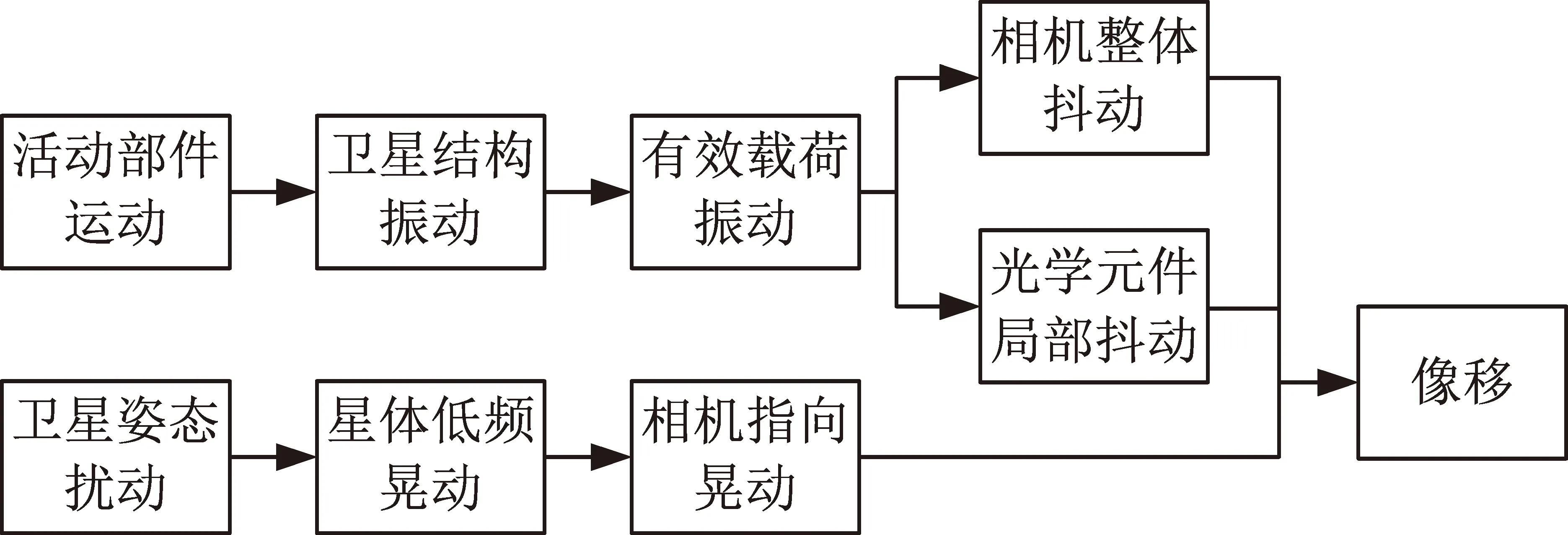
图2 卫星微振动对成像质量影响链路Fig.2 Satellite impact link of micro-vibration to imaging quality
根据高分多模卫星构形布局和结构形式,重点考虑CMG扰动,微动传递链路如图3所示。

图3 高分多模卫星微振动对成像质量影响链路Fig.3 GFDM-1 satellite impact link of micro-vibration to imaging quality
微振动对成像质量影响链路,主要包括扰动源、传递路径、有效载荷3个方面的因素。其中,传递路径又包括CMG隔振装置、主结构和相机隔振装置3个部分。根据高分多模卫星的微振动抑制任务需求和构形布局特点,同时采取CMG隔振装置和相机隔振装置降低传递至相机的微振动幅值,CMG隔振装置、星体结构、相机隔振装置共同构成二级柔性浮筏式减振系统。
2.3 扰动源特性研究
卫星在轨微振动主要是由于活动部件运动引起的,主要包括CMG、SADA、数传天线驱动机构、中继天线驱动机构和三浮陀螺等。根据在轨测量数据,CMG是扰动能量最高的设备。数传天线双轴驱动机构、SADA、三浮陀螺、太阳翼等活动部件引起的扰动,相对CMG引起的扰动均为小量,影响可忽略,因此卫星微振动抑制重点考虑CMG引起的扰动。
CMG扰动特性一般通过六分量测力平台进行测量,测试状态如图4所示。六分量测量平台可实现对空间正交的三个力和三个力矩的动态测量,具有结构刚度高、测量灵敏度高、标定精度高、可实现低频/超低频微振动测量等优点,可实现动量轮、CMG、制冷机等多种活动部件扰动特性的测量。

图4 CMG单机扰动特性测试Fig.4 Disturbance characteristic test of CMG
125 Nms CMG的典型频谱如图5所示,其中Fx、Mx分别为垂直CMG安装面方向的力和力矩。CMG在稳速、机动状态下,各台CMG的扰振力、力矩频谱图呈现出一致性特征,均在0.4倍频、基频和二倍频出现峰值,其中基频峰值最大,二倍频峰值次之,0.4倍频峰值较小。

图5 125 Nms CMG典型频谱图Fig.5 Typical spectrogram of 125Nms CMG
2.4 微振动抑制设计
1)扰动源隔振
为适应小惯量布局要求,CMG群统一安装在CMG支架上,采用“并联隔振装置”整体隔振。CMG模块在整星中的位置如图6所示。8根含微动隔振器的隔振杆组成桁架结构,对CMG和CMG支架提供支撑功能,同时,隔振器的阻尼输出能够起到降低CMG共振峰值响应的作用。在轨工作时,由CMG传出的6个自由度微振动,被分解为8根隔振杆的轴向微振动载荷,通过隔振杆内微动隔振器的阻尼和刚度作用,对微振动进行衰减和隔离。

图6 CMG模块在整星中的位置Fig.6 Position of CMG module in whole satellite
这种整体隔振可以使平台设计质量、空间代价最小,提高隔振系统使用效能和隔振效果;有利于保证CMG群连接刚度和连接强度,保证CMG模块安装刚度和整星刚度,保证活动部件高速运转时的方位和指向要求;可以通过杆系设计,保证对CMG群的6自由度有效隔振,同时与整星结构一体化设计,可有效防止引入隔振装置对整星结构频率造成不利影响。
微动隔振器(如图7所示)是并联隔振装置中的核心单机,通过在隔振弹簧内部并联流体阻尼器,实现系统刚度匹配和阻尼输出功能。这种隔振器具有很高的阻尼系数,由于是通过自身的弹性变形来驱动流体运动,因此能够在很小的变形位移行程上实现阻尼效果。

图7 微振动隔振器Fig.7 Micro-vibration isolators
为验证并联隔振装置的减隔振特性,开展了并联隔振装置微振动试验,如图8所示。试验件安装在地面工装上,分别测试CMG工作时隔振杆和刚性杆两种状态下CMG模块的输出特性。测试结果表明,并联隔振装置能够将CMG群输出的微振动干扰力衰减80%以上。

图8 并联隔振装置微振动试验Fig.8 Micro-vibration test of parallel isolators
2)星体结构减振
由扰源产生扰动,至有效载荷形成微振动响应,其间扰动能量经星体结构进行传递。传递特性受到卫星各环节力学特性的影响,表现出极为复杂的规律,隔振装置必须与卫星结构进行合理的匹配性设计,才能够实现较好的性能指标。扰动源经结构传递后至有效载荷的微振动响应是评价减振能力的依据,因此结构传递是决定能否满足微振动抑制能力需求的必要环节。
星体结构微振动抑制能力的设计手段目前较为有限,主要是对主传力路径和关键局部结构进行合理的频率分配,避免结构引起共振放大。影响动力学传递特性的三个主要参数为刚度、质量、阻尼。降低结构传递本质上是对结构传递路径中的刚度、质量和阻尼进行调节,主要通过刚度匹配改变传递率的频率特性,通过阻尼匹配改变传递率的幅值特性,通过质量匹配改变传递率的能量分配。星体结构减振设计重点针对四个方面:扰动源部件局部支撑结构频率设计、隔振装置局部连接结构刚度设计、有效载荷连接结构频率设计、卫星本体自由边界低阶模态设计。
CMG支架为星体结构传递中的重要环节,为避免结构引起共振放大,通过并联隔振装置力学试验,验证了CMG支架在扰动源特征频点附近不存在局部模态,能够保证良好的减振性能。
3)敏感载荷隔振
对于有效载荷隔振,在相机与星体结构之间加入相机柔性适配装置,使相机悬浮安装,在起到隔振作用的同时,还可释放相机与星体结构之间热变形不协调形成的热应力,改善载荷视轴与姿态敏感轴之间的夹角稳定度。
高分多模卫星兼顾热稳定和减隔振需求,设计了相机柔性适配装置(如图9所示),安装于平台与相机之间。相机柔性适配装置主要包括支撑环框、柔性组件、解锁组件三部分。其中,柔性器由隔振弹簧和特定频率阻尼增强的磁阻尼器组成,是实现减隔振功能的主要部件。

图9 相机柔性适配装置Fig.9 Flexible adapter of camera
通过柔性器动静刚度测试和单机阻尼测试,获取了柔性器的刚度、阻尼特性,在此基础上进行仿真分析得到,相机柔性适配装置在10~500 Hz范围内,插入损失总均方根值不低于80%;在0.4倍频、基频处的插入损失不低于90%。
3 系统级微振动抑制验证
3.1 地面试验验证
为了更准确地测量加入减隔振措施前后,星上活动部件扰动下的微振动响应,以验证微振动抑制措施的有效性;同时获取微振动经过平台结构传递的动态特性,为修正平台结构微振动传递模型提供依据,需要在卫星研制的不同阶段,根据需求设计并开展整星微振动试验。
高分多模卫星开展了安装并联隔振装置与不安装并联隔振装置两种状态的整星微振动试验,如图10所示。卫星采用支撑式自由边界条件模拟工装模拟卫星在轨时的自由-自由边界。试验过程中,在扰动源、有效载荷等关键部位布置了高灵敏度加速度计,获取了各关键部位的加速度响应,同时采用激光陀螺作为角位移传感器来获取了相机的角位移响应。试验结果表明:卫星主结构对微振动具有良好的衰减作用,各关键设备均未发生与CMG特征频率耦合共振现象;CMG扰动主要集中在CMG工频的0.4倍频和基频两个频点,基频处幅值最高;相机典型积分时间内CMG扰动引起的相机主框角位移未超过0.1像元;并联隔振装置、相机柔性适配结构分别能够将微振动响应衰减83%、91%以上,以上结果均满足指标要求。

图10 整星微振动试验Fig.10 Micro-vibration test of the whole satellite
为获取正样设计状态下载荷适配结构和星敏感器、CMG等关键设备安装结构的局部频率特性,以及CMG模块与服务舱立柱连接点到各关键设备在关键频点和关注频率范围内的传递特性,并为修正微振动分析模型提供依据,高分多模卫星在正样阶段开展了微振动局部耦合特性测试。试验结果进一步表明星敏感器、CMG等关键设备安装结构的局部频率均未与CMG特征频率发生耦合。
通过初样阶段的整星微振动试验和正样阶段的微振动局部耦合特性测试,可充分证明星上星敏感器、CMG等关键设备安装结构的局部频率均未与CMG特征频率发生耦合,并联隔振装置、相机柔性适配结构的微振动响应衰减率均满足指标要求,整星微振动抑制设计可满足相机成像需求。
3.2 仿真分析与在轨响应预示
1)有限元建模
微振动仿真分析是微振动抑制设计与验证的重要手段之一。高分多模卫星建立了在轨状态有限元模型(如图11所示),并根据微动隔振器特性测试、相机柔性适配装置柔性器特性测试、整星微振动试验、整星微振动局部耦合特性测试等试验结果不断进行修正,指导微振动方案验证、微振动试验预示、在轨微振动响应及成像质量预示等各个阶段的微振动设计与验证工作。

图11 高分多模卫星在轨状态有限元模型Fig.11 Finite element model of GFDM-1 satellite on orbit
2)CMG到关键位置传递特性分析
利用有限元模型可计算得到CMG到相机、陀螺、星敏等关键位置的传递特性,具体方法为:在CMG安装点施加单方向的单位扰动力,计算相机等关键位置的频域响应,进而得到CMG到各关键位置的传递特性。高分多模卫星通过仿真分析得到CMG到相机主镜、次镜的传函曲线如图12所示。

图12 CMG安装点到相机传递函数Fig.12 Transfer function from CMG to camera
由图12可以看出,由CMG安装点至相机、陀螺和星敏的传函在0.4倍频、基频处都具有一定的衰减效果;各关键设备均未发生与CMG特征频率耦合共振现象。分析结果还表明,经过并联隔振装置,响应衰减优于80%;经过相机柔性适配装置,响应衰减约90%。
3)相机微振动响应分析
根据CMG扰动特性实测数据和CMG到相机主镜、次镜等关键位置的传递函数,采用基于模态叠加的时域响应分析方法进行计算,可得到相机主镜、次镜等关键位置的微振动响应。仿真得到高分多模卫星相机主镜的时程响应曲线,以及在俯仰、滚转两个方向的角振动曲线如图13所示,主镜角振动峰峰值约为3×10-8rad,按照相机刚体假设,采用主镜角位移近似代替相机抖动,则相机角振动量约为0.05像元,满足指标要求。
图13 相机主镜微振动响应Fig.13 Micro-vibration response of camera
4)像移分析
采用光学灵敏度方法进行像移分析。由光学系统模型得到光学灵敏度矩阵,然后根据有限元响应分析可得到的各光学元件6自由度时域响应曲线计算像移时程曲线。计算结果表明,高分多模卫星典型工况与曝光时间内像移量最大值小于0.1像元,满足指标要求。
3.3 飞行验证
采用仿真分析和地面试验进行整星在轨微振动预示存在一定的误差与局限性,采用星载测量设备对卫星在轨运行阶段的微振动进行测量,是获取在轨微振动响应最直接、最准确的手段[11-12]。综合考虑关键载荷布局、微振动传递路径与微振动响应特性,在CMG安装点、CMG隔振杆与立柱连接点、陀螺组件、相机柔性适配装置、相机主镜、相机次镜等关键位置布置了13个微振动传感器,对卫星平飞、机动2种工况下的微振动响应进行了测量,采样频率为4800 Hz。某平飞时段在轨测量得到的CMG安装点、相机主镜的时域、频域微振动响应曲线如图14所示。

图14 在轨测量微振动响应曲线Fig.14 Micro-vibration response curves measured on orbit
通过对高分多模卫星在轨测量数据进行处理分析可知:星上微振动频率特性与理论值一致,主要包含CMG工频的0.4倍频、基频、二倍频和三倍频等几个频点,其中基频、二倍频处峰值较大,0.4倍频、三倍频处峰值较小;CMG扰动经过CMG支架、CMG并联隔振装置、立柱、载荷适配结构、相机柔性适配装置明显逐级衰减,全路径扰动衰减率在90%以上,传递到相机的响应已接近噪声级。高分多模卫星微振动抑制方案效果显著,成功满足了敏感载荷的微振动抑制需求。
高分多模卫星在轨拍摄图像轮廓清晰、无扭曲变形,进一步表明高分多模卫星微振动抑制措施可有效保证成像质量,图15为其拍摄的迪拜机场。

图15 拍摄的迪拜机场Fig.15 Dubai airport photographed
4 结论
为保证成像质量,高分多模卫星系统性地开展了卫星微振动抑制方案设计与验证工作,包括微振动抑制总体方案设计、微振动对成像质量影响链路分析、微振动抑制需求分析、减隔振装置设计、微振动仿真分析、地面试验验证与飞行验证等。
在轨测量数据表明,CMG扰动经过CMG支架、CMG并联隔振装置、立柱、载荷适配结构、相机柔性适配装置明显逐级衰减,传递到相机的响应已接近传感器噪声量级,表明高分多模卫星微振动抑制方案效果显著,成功满足了敏感载荷的微振动抑制需求。
高分多模卫星微振动抑制设计与验证方法,以及高分多模卫星研制的并联隔振装置、相机柔性适配装置等减隔振产品均具有较强的通用性,可为我国后续敏捷型遥感卫星的微振动抑制设计与验证提供参考。