高分多模卫星高刚度太阳翼机构设计与验证
2021-07-03商红军任守志盛聪郑树杰
商红军 任守志 盛聪 郑树杰
(1 北京空间飞行器总体设计部,北京 100094)(2 北京卫星制造厂有限公司,北京 100094)
自从第一颗遥感卫星诞生以来,随着遥感卫星技术的不断发展及对地观测任务需求的不断提升,卫星遥感图像的空间分辨率和卫星的姿态机动能力不断提高。遥感卫星的在轨刚度和转动惯量,越来越成为影响遥感图像空间分辨率和卫星姿态机动能力的重要因素,尤其是高分辨率、高敏捷的遥感卫星更需要具有高刚度和低惯量的特点[1-3]。而太阳翼作为卫星在轨飞行时外形尺寸最大、刚度最低的可展开部件,对遥感卫星在轨刚度和转动惯量的影响非常大。以往遥感卫星的太阳翼,均为多块基板串联一维展开的刚性太阳翼,其展开状态的整体外形为窄长的矩形,导致太阳翼的质心距离卫星较远、转动惯量很大,而展开状态的刚度却很低[4],无法满足高分辨率、高敏捷遥感卫星的要求。因此,只有低惯量、高刚度太阳翼才能满足高分辨率高敏捷遥感卫星的任务要求[5-9]。
高分多模卫星是中国空间技术研究院研制的一颗高分辨率、高敏捷光学遥感卫星。针对高分多模卫星对低惯量、高刚度太阳翼的需求,在传统多板串联一维展开刚性太阳翼技术的基础上,开发了一种三块基板并联二维两步展开的低惯量、高刚度刚性太阳翼机构方案,设计并研制了两套低惯量、高刚度二维展开刚性太阳翼。
本文总结了高分多模量卫星三板并联高刚度太阳翼机构的设计及验证情况,着重介绍了太阳翼构型及展开过程设计、高刚度基板及高刚度铰链设计,在此基础上,开展了太阳翼展开状态基频和展开过程动力学仿真分析验证,介绍了高刚度铰链、太阳翼展开状态刚度和太阳翼展开性能的地面试验验证情况,最后介绍了高分多模卫星太阳翼在轨飞行验证情况,可为我国高刚度太阳翼机构设计及研制提供参考。
1 机构设计
高分多模卫星是一颗典型的高分辨率、高敏捷遥感卫星,其太阳翼机构设计的关键要求包括:①低惯量设计,即展开状态质心靠近卫星,转动惯量小,利于卫星快速姿态机动;②高刚度设计,即展开状态刚度高,保证卫星姿态或轨道机动等引起的太阳翼颤振能够快速衰减,利于卫星实现姿态的快速稳定和高精度观测成像;③高可靠展开,保证太阳翼能够正常发电,确保卫星供电安全。为满足上述要求,主要开展了三板并联构型方案设计、与并联构型相适应的二维两步展开方案设计及高刚度部件设计。
1.1 构型设计
构型是影响太阳翼展开状态刚度和转动惯量的重要因素。根据结构动力学理论,展开状态外形又短又宽的太阳翼,展开状态转动惯量更小、基频更高。因此,针对传统串联太阳翼惯量大、刚度低与高分多模卫星对低惯量、高刚度太阳翼需求的矛盾,提出了展开状态外形又短又宽的三板并联构型作为高分多模卫星的太阳翼构型方案。在该构型方案中,太阳翼机构由3块可铺贴太阳能电池的基板、1个根部铰链、4个侧板铰链、4套压紧装置和1套侧板释放装置组成。其中,3块基板分别为中心板、上侧板和下侧板,外形尺寸相同,长度均为2200 mm,宽度均为1200 mm,中心板通过根部铰链与星上太阳电池阵驱动装置(SADA)相连,上侧板和下侧板分别通过两个侧板铰链与中心板的长边相连,形成了上侧板、中心板和下侧板三板并联的展开状态构型,如图1所示。太阳翼展开状态本体长度为2200 mm,宽度为3800 mm,总面积为7.92 m2。三板并联构型实际上是一种树状结构,中心板为主干,两块侧板为支干,这是一种天然的结构刚度很高的构型方案。
在收拢状态,太阳翼的上侧板和下侧板分别收拢在中心板的正面和背面,并通过压紧装置压紧在卫星侧壁结构上,如图2所示。高分多模卫星在轨飞行状态如图3所示。

图2 太阳翼收拢状态Fig.2 Stowed solar array

图3 卫星在轨飞行状态Fig.3 Satellite on-orbit configuration
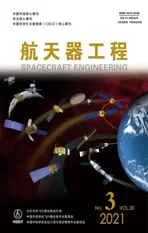
相比传统3块基板串联的太阳翼(见图4,基板尺寸和结构设计完全相同),3块基板并联太阳翼的长度缩短2倍,宽度增大2倍,展开状态的构型由窄长变为短宽,这就导致太阳翼的质心与卫星的距离减少2倍,转动惯量显著减小,面外弯曲刚度则显著增大[9]。根据计算可知,太阳翼结构的面外弯曲刚度增大2倍,面外弯曲方向的转动惯量减小至传统串联构型太阳翼的约1/8。
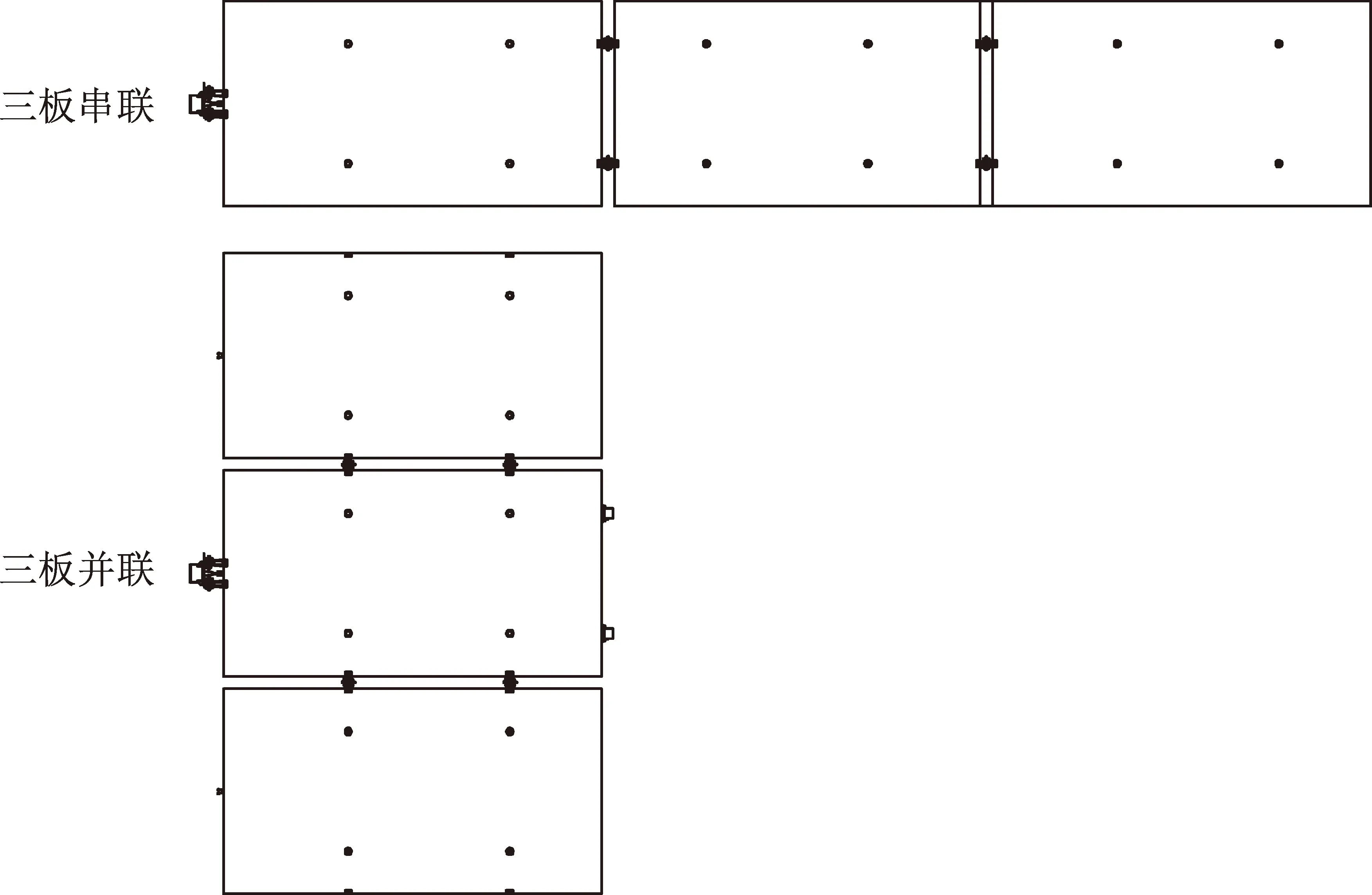
图4 太阳翼展开状态示意图Fig.4 Solar array deployment configuration
1.2 展开方案设计
传统串联太阳翼展开方式为一维展开,而高分多模太阳翼为三板并联构型,无法采用一维展开方式。针对这种构型的特殊性,设计了与之相适应的二维两步展开方案(见图5):第一步,所有压紧装置解锁后,3块太阳电池板在根部铰链的作用下展开,直至根部铰链展开到位并锁定,此过程中2块侧板收拢在中心板上,见图5(a)~(c);第二步,在根部铰链即将展开到位前,通过侧板释放装置释放2块侧板,2块侧板在侧板铰链的驱动下,分别向中心板的两侧展开,直至展开到位并锁定,见图5(d)~(f)。采用两步展开的方式并且在根部铰链展开到位前才释放侧板,可以避免压紧在星体与中心板之间的侧板与卫星发生干涉。这种二维两步展开方案,可以较好地满足三板并联构型太阳翼的展开需求。

图5 太阳翼展开过程示意图Fig.5 Solar array deployment sequences
1.3 部件设计
太阳翼展开状态的刚度,除了与构型密切相关外,也与太阳翼的主要部件即基板和铰链的刚度密切相关,提高基板和铰链的刚度,就可以提高太阳翼的展开状态刚度。
1.3.1 高刚度基板
为了保证高分多模卫星太阳翼获得高刚度,基板结构选用高刚度、轻量化的碳纤维面板/铝蜂窝夹层结构。为了进一步提高基板的刚度,主要采取了两种设计措施:一是通过增大铝蜂窝芯的高度,来增大三块基板的厚度,这会大大增加基板的弯曲刚度;二是选择高模量碳纤维作为基板的面板材料,并优化铺层设计,可以进一步提高基板的弯曲刚度。根据蜂窝夹层结构弯曲刚度的计算公式可知,这两种提高基板刚度的设计措施中,增大蜂窝芯高度比选用高模量碳纤维材料的效果更明显。
1.3.2 高刚度铰链
铰链作为太阳翼与卫星以及太阳翼基板之间的连接部件,在基板刚度显著提高之后,就成为影响太阳翼展开状态刚度的关键因素,低刚度的铰链会使得基板刚度的提高变得几乎没有意义。
根部铰链用于高分多模卫星太阳翼与卫星之间连接,其刚度对太阳翼的刚度影响非常大。在设计上,通过增大外形尺寸、引入四杆锁紧机构和采用高模量材料等设计措施,在保证可靠的展开锁定性能并维持质量基本不变的情况下,获得了远超传统销槽式铰链的高锁定刚度。根部铰链示意如图6所示。
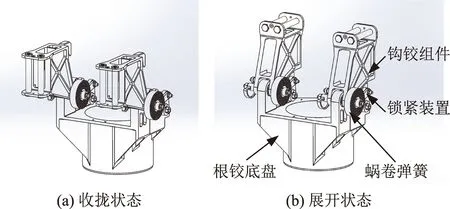
图6 根部铰链示意图Fig.6 Root hinge
侧板铰链用于中心板与两块板侧板的连接,也采用与根部铰链相同的四杆锁紧机构和高刚度设计措施,同样实现了高刚度设计。侧板铰链收拢状态和展开状态示意如图7所示。

图7 侧板铰链示意图Fig.7 Panel hinge
2 仿真分析与验证
到目前为止,太阳翼依旧是大多数航天器唯一的能源提供装置,因此一旦出现在轨展开故障,就会造成航天器失效,损失巨大。因此,需要对太阳翼展开机构的设计进行充分的仿真分析验证,对太阳翼实际产品的功能和性能进行地面试验验证和在轨飞行验证。在高分多模卫星太阳翼机构设计的3个主要关切中,低惯量特性通过简单几何计算即可获得验证,而高刚度和可靠展开的实现难度较大且准确性要求高,因此需要通过仿真分析、地面试验及在轨飞行等方式进行综合验证。
2.1 仿真分析
仿真分析是验证太阳翼展开方案设计正确性及获取太阳翼结构动力学特性和展开过程动力学特性的主要手段。本文重点针对高分多模卫星太阳翼高刚度及二维两步展开特性进行仿真分析,主要内容包括展开状态模态分析及展开过程动力学仿真分析。
2.1.1 展开状态模态分析
太阳翼展开状态刚性通常以展开状态固有频率来表征。通过太阳翼展开状态模态分析,可以获得太阳翼展开状态模态振形及对应的固有频率,从而验证太阳翼展开状态刚度是否满足设计要求。根据高分多模卫星太阳翼结构设计,建立了太阳翼展开状态的有限元模型,完成了展开状态模态分析,获得了太阳翼展开状态的主要模态振型和对应的固有频率,结果表明:高分多模卫星太阳翼展开状态一阶面外弯曲频率(f1)为2.45 Hz,一阶扭转频率(f2)为2.68 Hz,一阶面内弯曲频率(f3)为2.79 Hz,模态振型如图8所示。
相同面积的传统三板串联刚性太阳翼的面外弯曲基频通常在0.2 Hz~0.4 Hz之间,因此高分多模卫星太阳翼的面外弯曲基频高达传统三板串联太阳翼的6~12倍。
2.1.2 展开过程动力学仿真分析
通过展开过程动力学仿真分析,可以验证太阳翼机构展开方案设计的合理性,并获取太阳翼在轨展开动力学特性(包括展开时间、各部件运动规律及力学特性等)[10]。根据高分多模卫星太阳翼结构及机构设计,建立了太阳翼展开过程动力学仿真分析模型,模型中的中心板和两块侧板均为柔性结构,以保证仿真结果更符合实际情况。针对低温工况,开展了太阳翼展开过程动力学仿真分析,得到太阳翼展开过程如图9所示,与1.2节图5所设计的展开方案基本一致。
图9 太阳翼展开过程动力学仿真结果Fig.9 Deployment dynamics simulation of solar array
由于惯性作用,两块侧板的展开速度并不一致,其中收拢状态处于中心板外侧的下侧板的展开速度要快于上侧板。中心板、下侧板和上侧板展开到位后,均会直接或间接对与根部铰链固连的SADA产生锁定冲击载荷,其中中心板最先展开到位,然后是下侧板,最后是上侧板,对应图10中曲线的3个较高的波峰。从压紧装置解锁释放至上侧板锁定为太阳翼展开时间(18 s),对应图10中曲线中第3个较高的波峰。

图10 低温工况下太阳翼根部铰链锁定冲击载荷Fig.10 Shock load on root hinge at the end of deployment at the minimum temperature
在两块侧板展开时,中心板会受到两侧板的反向驱动。由于通过根部铰链与中心板固连的SADA的保持力矩较小,SADA会相对两块侧板反向旋转,在两块侧板锁定后会出现来回振荡现象,直至转动能量在耗散完毕,SADA才会停止转动。展开过程中SADA转动角度曲线,如图11所示,SADA转动角速度曲线,如图12所示。

图11 低温工况下太阳翼展开过程中SADA转动角度曲线Fig.11 SADA rotation angle during solar array deployment at the minimum temperature

图12 低温工况下太阳翼展开过程中SADA转动角速度曲线Fig.12 SADA angular velocity during solar array deployment at lowest temperature
2.2 地面试验验证
通过地面展开试验,可以在航天器最终飞行试验前充分验证太阳翼的展开功能和性能,暴露潜在的刚度不足、力矩裕度不足、干涉等问题,并为采用相应的解锁措施提供参考。本文针对高分多模卫星太阳翼高刚度及二维两步展开特性,重点介绍太阳翼展开状态固有频率测试情况及地面展开试验验证情况。
2.2.1 太阳翼展开状态固有频率测试
在吊挂展开状态下,对高分多模卫星太阳翼飞行产品,进行了展开状态面外弯曲固有频率测试,测得太阳翼展开状态面外弯曲一阶固有频率为2.09 Hz,该测试值中包含了吊挂装置、空气等附加质量的影响,非常保守。通过仿真分析,消除吊挂装置质量的影响后,得到该太阳翼展开状态面外弯曲一阶固有频率为2.35 Hz,与仿真分析结果一致,证明高分多模卫星太阳翼实现了高刚度设计。太阳翼展开状态面外弯曲一阶固有频率测试曲线,如图13所示。
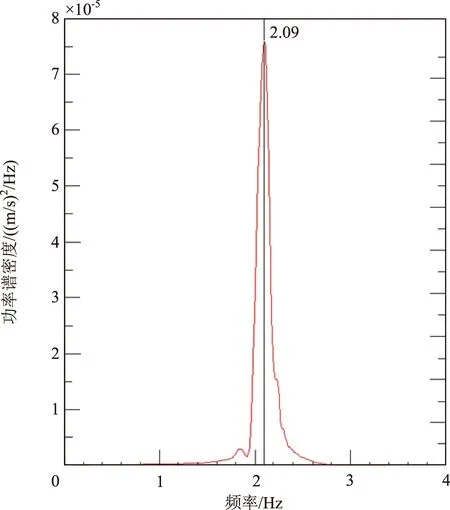
图13 太阳翼展开状态固有频率测试曲线Fig.13 Solar array fundamental frequency measurements in deployed configuration
2.2.2 地面展开试验
1)地面展开试验设计
由图5可知,高分多模卫星太阳翼的展开过程为二维运动,因此需要设计并研制与三板并联两维展开特性相适应的二维吊挂式零重力展开试验装置,以在地面对太阳翼展开功能和性能进行充分的试验验证。
由2.1.2节太阳翼展开过程动力学仿真分析结果表明:在太空中展开时,高分多模卫星太阳翼的上侧板和下侧板并非同步展开。在实际的工程研制过程中,为了简化太阳翼地面展开试验方案,在展开试验装置设计时,太阳翼的上侧板和下侧板按同步展开处理。太阳翼二维吊挂式展开试验装置原理如图14所示。

图14 太阳翼吊挂展开试验装置工作原理Fig.14 Schematic diagram of solar array zero-G deployment rig
在图14中,翻转梁为左右对称结构,两根吊绳的吊点关于翻转梁转轴左右对称,上侧板和下侧板的外侧边通过吊绳与翻转梁两端连接,翻转梁与两块侧板和吊绳分别组成了2个平行四边形。通过配平的方法,使上侧板和下侧板质量相同且质心到铰链转轴的距离相同,这样两根吊绳的吊挂力通过翻转梁的传递就能够保持相同。两块侧板的零重力吊挂实际上是一种力矩平衡的方式,即吊挂力与侧板重力关于侧板铰链转轴保持力矩平衡。两块侧板的质量,一部分由吊绳卸载,一部分通过侧板铰链传递至中心板卸载,这样的处理可以使展开试验装置的设计得到简化。
2)地面模拟墙上展开试验
高分多模卫星太阳翼装配完成后,根据研制流程安排,在二维吊挂式零重力展开试验装置上,进行了多次地面展开试验,以检验其展开功能和性能。在历次展开试验中,太阳翼展开运动均平稳顺畅,两块侧板均在预设的转动角度准确释放,所有铰链均锁定良好,验证了高分多模卫星太阳翼的展开功能和性能,也验证了二维吊挂式展开试验装置设计的正确性及工作性能。高分多模卫星-Y太阳翼在模拟墙上的展开过程如图15所示。

图15 -Y太阳翼展开过程照片Fig.15 -Y solar array deployment sequences
2.3 在轨飞行验证
2020年7月3日11点9分,高分多模卫星在太原卫星发射中心由长征四号运载火箭发射升空,卫星与火箭分离后,太阳翼按星上程控指令顺利解锁,并成功展开。根据星上遥测数据可知,-Y太阳翼展开时间为19 s,+Y太阳翼展开时间为18 s,与仿真分析结果一致性较好。星上监视相机记录下了-Y太阳翼展开过程如图16所示。经分析,太阳翼展开过程中包括两块侧板展开速度差异和SADA的转动情况在内的展开运动特性与2.1.2节图9中展开过程动力学仿真分析结果一致性较好。进一步验证了高分多模卫星三板并联二维两步展开高刚度太阳翼机构设计、展开动力学仿真分析及地面展开试验方法的合理性和正确性。

图16 星上监视相机实拍-Y太阳翼在轨展开过程视频截图Fig.16 -Y solar array on-orbit deployment sequences acquired by on-board monitoring camera
3 结论
本文介绍了高分多模卫星高刚度太阳翼机构设计及验证情况,得到如下结论。
(1)通过采用三块基板并联构型、高刚度基板设计以及高刚度铰链等措施,使高分多模卫星太阳翼展开状态的转动惯量降低至传统串联太阳翼的约1/8,而其面外弯曲基频的仿真分析值达到2.45 Hz,比相同面积串联太阳翼的刚度提高6~12倍,该结果也与太阳翼基频地面实测结果一致,实现了太阳翼低惯量和高刚度设计。
(2)在历次地面展开试验中,高分多模卫星太阳翼均正常平稳展开并可靠锁定,太阳翼机构设计正确性及机构性能得到充分的地面试验验证,也验证了二维吊挂式展开试验装置设计正确性及工作性能。
(3)高分多模卫星太阳翼随卫星成功发射入轨,经受了发射段恶劣的力学环境条件考验,在轨成功展开并锁定,在轨展开时间、两块侧板展开速度差异和SADA转动情况与仿真分析结果一致,验证了高分多模卫星高刚度太阳翼机构设计、展开动力学仿真分析及地面展开试验方法的合理性和正确性。
综上,高分多模卫星高刚度太阳翼机构的相关设计及验证结果,可为我国后续高刚度太阳翼机构设计及研制提供参考。