核磁共振陀螺中静磁场强度对原子核自旋进动信号的影响
2021-07-02范晓婷刘院省霍丽君
范晓婷, 刘院省, 黄 伟, 贺 宇, 霍丽君
(1.中国航天科技集团有限公司量子工程研究中心,北京100094;2.北京航天控制仪器研究所,北京100039)
0 引言
惯性导航具有全自主、实时连续、无时间/地域和环境限制等特点,是武器装备实现可靠自主导航的重要保障[1-2]。随着武器装备向微小型化发展,研制小体积、高精度的惯性系统已成为惯性技术的重要发展趋势。随着现代物理学的快速发展,以原子作为敏感介质的原子陀螺应运而生。其中,核磁共振陀螺利用原子核自旋进动敏感载体转动信息,具有高精度、小体积和低功耗等特点,是惯性技术领域的研究重点和热点之一[3-4]。
20世纪40年代,Bloch和Purcell分别发现了原子核在静磁场中吸收特定频率的射频电磁波能量并产生共振的现象[5-6],为核磁共振陀螺的产生和发展奠定了基础。美国DARPA资助的 M-PNT计划、C-SCAN计划和PINS计划旨在研制高精度的惯性导航系统,在DARPA支持下,美国的核磁共振陀螺处于世界领先水平[7-8]。2014年,美国Northrop Grumman公司基于Litton公司的技术积累成功研制出体积为10cm3和零偏稳定性为0.01(°)/h的核磁共振陀螺原理样机[9-10]。此外,美国加州大学欧文分校[11]和美国标准技术研究院[12]一直致力于芯片级核磁共振陀螺的研究。国内核磁共振陀螺研究起步较晚,目前处于原理样机研制阶段,主要研究单位包括北京航天控制仪器研究所、北京自动化控制设备研究所、北京航空航天大学和国防科技大学等科研院所和高校。近年来,上述单位相继突破了激光精密调控技术[13-15]、无磁电加热技术[16-17]、 长弛豫时间原子气室制备技术[18]和磁补偿技术[19-20]等。
核磁共振陀螺检测信号中既包含原子核自旋进动磁场信号,也包含驱动磁场信号,后者会导致检测到的原子核自旋磁矩进动相位产生误差,制约陀螺性能的提升。提高原子核自旋进动磁场信号和驱动磁场信号比值,减小驱动磁场对陀螺信噪比的影响,是实现高性能核磁共振陀螺的重要研究内容。本文从理论上深入研究了静磁场强度对检测信号相位的影响,并通过实验研究了检测信号中原子核自旋进动磁场与驱动磁场的比值关系随静磁场强度变化的影响。结果表明,提高静磁场强度能够显著抑制驱动磁场引入的干扰,对于提升核磁共振陀螺信噪比具有重要参考价值。
1 理论模型
核磁共振陀螺利用惰性气体原子核自旋磁矩在静磁场中的Larmor进动敏感载体转动信息,其工作原理如图1所示。泵浦光和静磁场B0沿z轴使原子自旋磁矩具备宏观指向,y轴方向的驱动磁场使宏观核自旋磁矩绕静磁场Larmor进动,检测光沿x轴方向探测核自旋磁矩的进动频率,得到载体的输入角速度信息。

图1 核磁共振陀螺仪工作原理Fig.1 Working principle of nuclear magnetic resonance gyroscope
核磁共振陀螺的检测光采用线偏振光,施加外部磁场后,线偏振光经过含有87Rb蒸气的气室后会分解成左旋和右旋圆偏振光。由于两种光的折射率不同,检测光经过气室后其偏振方向会发生旋转,旋转的角度θ为[21-22]
式(1)中,c为真空中的光速,l为气室长度,re为电子半径,N为气室内87Rb原子蒸气密度,Px为x方向上87Rb原子极化率,fD1为87Rb原子D1线共振常数,fD2为87Rb原子 D2线共振常数,V(vvD1)、V(v-vD2)为 Voigt线型函数,Im[·]表示取复数的虚部。由式(1)可知,检测光通过气室后的旋转角θ与光传播方向上的87Rb原子极化率Px成正比。
线偏振光经过偏振分束器后分成相互垂直的两束光,两束光的光强差为探测器的输出信号。旋转角θ和输出信号的关系为:,I为0入射光的光强,IS和IP分别为分束后两束光的光强。检测光的两束光强差变化与检测光偏振面旋转角θ的变化成正比,检测光偏振面旋转角θ与极化率Px成正比,极化率Px大小与探测器输出信号大小正相关。
静磁场B0作用于气室后,在y轴方向施加驱动磁场By=2B1cosωdt,调整驱动磁场频率使ωd=γ1B0, 此时原子核自旋磁矩开始Larmor进动,进动频率即驱动磁场频率。基于Bloch方程,得到87Rb原子体系的宏观极化率[23]

式(2)中,P0为87Rb原子的初始极化率,B为磁场强度,γ为87Rb原子的旋磁比,Rrel=[1/T21/T21/T1]T为弛豫矩阵,T1和T2为87Rb原子的纵向和横向弛豫时间。式(2)可进一步写成

式(3)中,Px和Py分别为x轴与y轴方向87Rb原子的极化率,P0为z轴方向87Rb原子的初始极化率,x、y、z为三个方向的单位向量。气室达到稳态时, 有[24]
式(4)中,Bx为131Xe原子进动时在x轴上投影得到的进动磁场,By为耦合进的外部驱动磁场。131Xe原子进动磁场在y轴上的分量为纳特(nT)量级,比y轴方向驱动磁场强度小1~2个数量级。由式(4)可知,x方向上87Rb原子极化率Px的大小与原子核自旋进动磁场Bx和耦合的外部驱动磁场By相关。
撤去静磁场B0的瞬间,极化率Px变为

气室中,87Rb原子的横向弛豫时间T2可表示为[25]
式(6)中,q为核减慢因子,为87Rb原子之间以及87Rb原子与气室内其它原子碰撞导致的自旋破坏碰撞速率,ROP为光泵浦率,Rpr为检测光吸收率,分别为87Rb原子间和87Rb原子与131Xe原子间的自旋交换碰撞率,qSE为自旋交换展宽因子,Rwall为87Rb原子与气室壁的自旋破坏碰撞速率,Rgr为磁场梯度导致的弛豫项。
在弱磁和充有足量缓冲气体条件下,原子扩散速率减慢,87Rb原子间的自旋交换碰撞率和与器壁间自旋破坏碰撞率Rwall大幅度减少,磁场梯度对弛豫的影响Rgr也可忽略不计。撤去静磁场前后,87Rb原子弛豫时间T2可简化为

原子间的碰撞是导致横向弛豫的主要因素,碰撞弛豫项均与温度和原子密度相关。由式(7)可知,横向弛豫时间T2与静磁场大小B0无关,故式(5)成立。撤去静磁场后,极化率Px的大小与驱动磁场By相关,检测光信号主要由驱动磁场决定。
2 计算仿真
根据式(4),可得出Px与B0间存在非线性关系。在仿真分析中,87Rb原子的γ为7kHz/μT,T2取典型值480μs,Pz取典型值50%,Bx取典型值10nT,By取典型值100nT,得到87Rb在x轴方向上的原子极化率Px与静磁场B0之间的关系,如图2所示。

图2 不同静磁场下87Rb原子在x方向上的极化率仿真结果Fig.2 Simulation results of87Rb atomic polarizability in x-direction under different static magnetic fields
仿真结果表明,随着静磁场B0的增大,87Rb在x轴方向上的原子极化率Px呈先上升后下降的趋势。当Px大于0.04时,静磁场B0在4.9μT~7.5μT之间,信号的信噪比理论上在此区间最佳。
根据式(4),还可以推导出静磁场存在时进动磁场信号幅值和驱动磁场信号幅值的比值

静磁场取值在0μT~10μT之间时,可得到不同静磁场下进动磁场信号幅值和驱动磁场信号幅值比值K1的仿真结果,如图3所示。
图3 不同静磁场下进动磁场信号幅值与驱动磁场信号幅值比值的仿真结果Fig.3 Simulation results of amplitude ratio of precession magnetic field signal to driving magnetic field signal under different static magnetic fields
当静磁场B0取典型值7μT时,原子核自旋磁矩进动磁场信号幅值ABx和驱动磁场信号幅值ABy的比值K1约为23,即进动磁场信号Bx对输出信号的影响约为驱动磁场信号By的23倍,进动磁场信号Bx在输出信号中占据主要部分,施加静磁场B0时输出信号主要为核自旋进动信号。随着静磁场的增大,进动磁场信号Bx与驱动磁场信号By的比值K1呈线性增长,核自旋磁矩进动磁场信号Bx占比增大。
3 实验与分析
实验中,采用波长为795nm的圆偏光(与87Rb原子D1线共振)作为泵浦光。DBR激光器产生线偏振光,经过λ/4波片后变成圆偏振光照射在气室上,光功率计用来检测原子对泵浦光的吸收情况,检测光是波长为795nm的线偏振光。激光出射后经准直器和PBS进入原子气室,出射后做差分处理。实验中使用4mm×4mm×4mm的原子气室,气室中充有87Rb、131Xe和氮气,气室放在加热片包裹的加热体中,加热体置于磁屏蔽内防止地磁场和外部磁场的干扰。驱动磁场线圈和静磁场线圈分别产生x轴和z轴方向的磁场,该实验装置系统如图4所示。
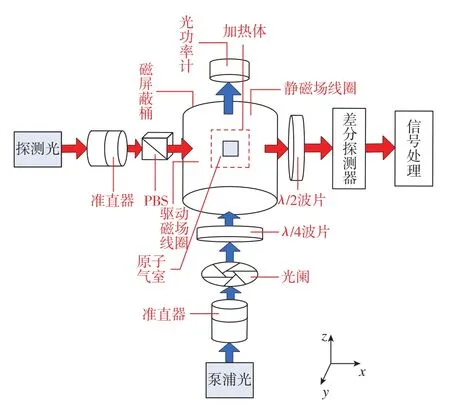
图4 实验装置系统示意图Fig.4 Schematic diagram of experiment device system
通过式(4)还可以看出,当施加静磁场和驱动磁场使原子进动达到稳态时,撤去驱动场后驱动磁场信号By项变为零值,输出信号幅值会发生突变后开始弛豫,现象如图5所示。该突变值即对应输出信号中驱动磁场信号的大小,弛豫信号初始幅值即为原子核自旋磁矩进动磁场信号的大小。
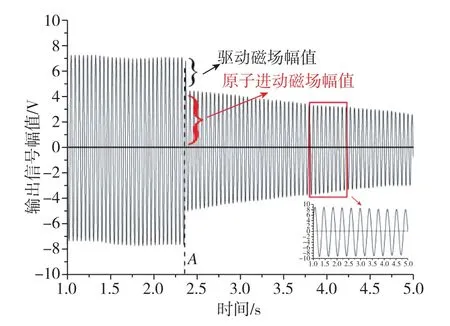
图5 A时刻撤去驱动磁场后的弛豫信号图Fig.5 Relaxation signal diagram after removing the driving magnetic field at time A
实验中,将气室加热至136℃,在y轴方向上施加驱动磁场,在z轴方向上施加静磁场,得到检测光的输出信号,调节静磁场大小使输出信号幅值最大且去掉驱动场后有明显的弛豫现象。调节驱动场相位,使撤掉驱动场后的弛豫信号与施加驱动场时的输出信号间有幅值突变。此时,差分探测器输出信号中的突变值为驱动磁场信号幅值,弛豫信号初始值为原子核自旋磁矩进动磁场信号幅值;去掉静磁场,信号稳定后差分探测器输出的信号为驱动磁场信号。
131Xe的输出信号幅值随静磁场大小B0变化的情况如表1所示。
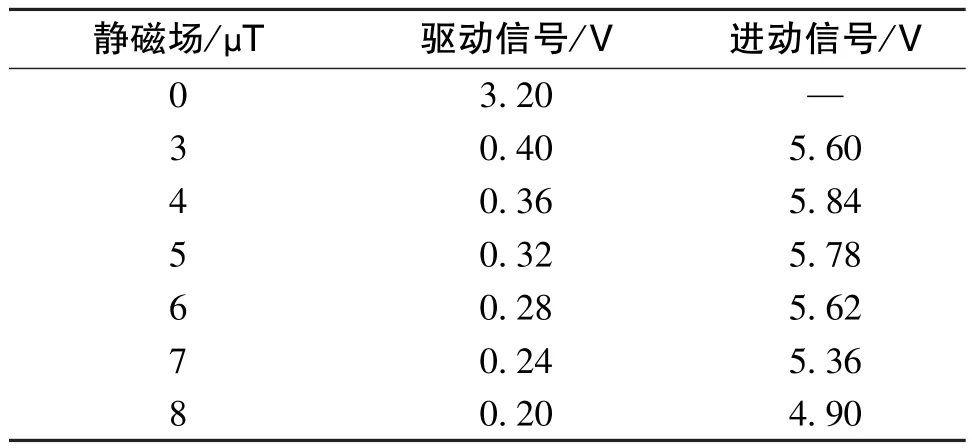
表1 不同静磁场下131Xe的输出信号Table 1 Output signal of131Xe at different static magnetic fields
对表1的数据进行拟合,得到在不同静磁场下输出信号中原子核自旋磁矩进动磁场信号幅值与驱动磁场信号幅值比值K1的曲线,如图6所示。
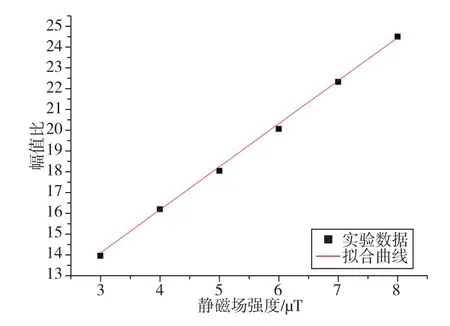
图6 不同静磁场下进动磁场信号幅值与驱动磁场信号幅值的比值Fig.6 Amplitude ratio of precession magnetic field signal to driving magnetic field signal under different static magnetic fields
由图6可知,随着静磁场的增大,原子核自旋进动磁场信号幅值与驱动磁场信号幅值的比值呈线性增长,且增长趋势近似于图3。当静磁场为7μT时,比值K1约为22,原子核自旋进动磁场信号幅值约为驱动磁场信号幅值的22倍,与仿真结果基本一致。当静磁场强度偏离最佳范围,如取1μT和10μT时,其测试结果如图7所示。
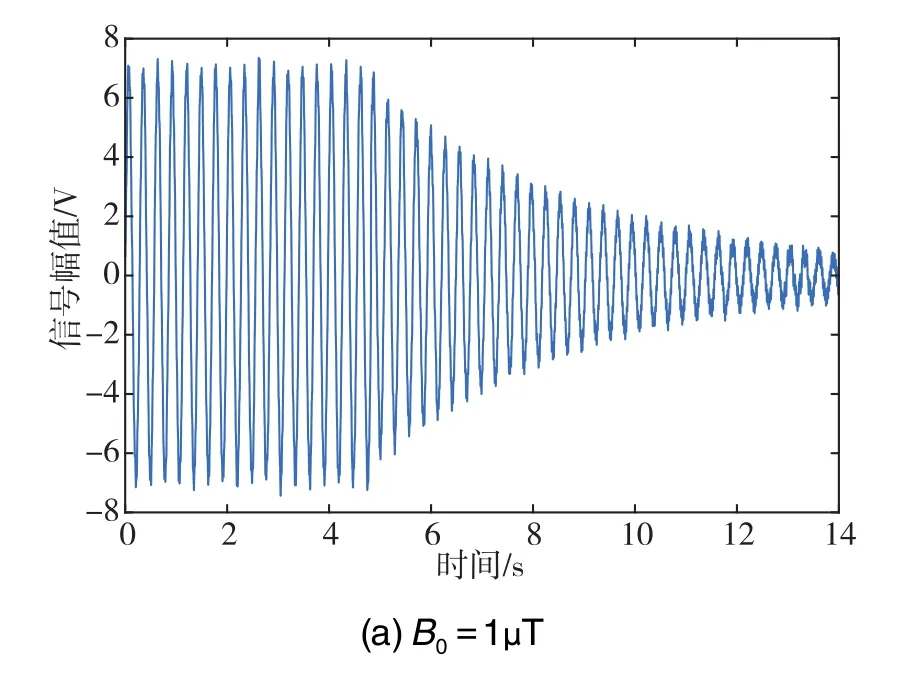
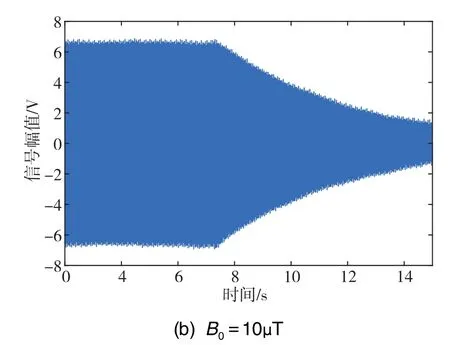
图7 弛豫信号测试图Fig.7 Test diagram of relaxation signal
由图7可知,当静磁场强度为1μT时,信号由于噪声干扰而存在波动,5s左右信号开始弛豫时虽然可以观察到阶跃现象,但无法准确测量出信号的阶跃幅值,即驱动磁场信号幅值;当静磁场强度为10μT时,信号较为稳定,7s后开始弛豫时信号几乎已无阶跃现象,这是由驱动磁场信号幅值过小导致的。实验结果证明,静磁场的存在能够有效抑制驱动磁场信号,且静磁场越大,抑制效果越明显。施加静磁场前后,87Rb原子极化率发生了变化,导致实验结果与理论仿真值间存在微小差别。
4 结论
针对核磁共振陀螺中静磁场强度对原子核自旋进动信号的影响,首先通过理论仿真得到陀螺输出信号中核自旋磁矩进动磁场信号幅值与驱动磁场信号幅值比值和静磁场强度之间的关系。由实验结果可得,核磁共振陀螺中静磁场强度B0直接影响原子核自旋磁矩进动磁场信号幅值与驱动磁场信号幅值的比值。不施加静磁场时的输出信号与131Xe原子驱动磁场信号一致;施加静磁场后的输出信号大部分为进动磁场信号,但随着静磁场的增大,输出信号幅值会有所下降。通过实验还可以发现,施加特定强度的静磁场B0能有效消除驱动磁场信号和原子进动磁场信号混合对核磁共振陀螺性能产生的不利影响。静磁场越大,进动磁场信号幅值与驱动磁场信号幅值的比值越大,抑制效果也越明显。当静磁场取最佳值7μT时,原子核自旋磁矩进动磁场信号幅值约为驱动磁场信号幅值的20倍,说明选用一定大小的静磁场有提高核磁共振陀螺信噪比的潜力,对陀螺的性能提升有重要作用。
