用于世界时测量的大型高精度光纤陀螺技术研究
2021-07-02冯文帅张首刚于海成
王 巍,冯文帅,张首刚,于海成,李 晶
(1.中国航天科技集团有限公司,北京100048;2.北京航天控制仪器研究所时代光电公司,北京100094;3.中国科学院国家授时中心,西安710600)
0 引言
在导航卫星系统中,为满足导航定位的实时性,地面主控站需提前预报导航卫星在地固系下的轨道坐标,提前注入到导航卫星存储,导航卫星不断将其广播给用户进行导航定位。地面主控站生成预测轨道时,需要对导航卫星进行精密的定轨,以实现用户导航定位的实时性与准确性[1]。此外,测绘卫星、海洋卫星需要至少分米级的定轨精度以实现高精度测绘与观测,空间飞行器的交会对接、月球以及行星探测任务均需实时进行轨道定轨的工作,保证入轨精度。
飞行器轨道所在的地心天球参考系(Geocentric Celestial Reference System,GCRS)与地面站所在的国际地球参考系(International Terrestrial Reference System,ITRS)的转换模型如下

式(1)中,Q(t)为岁差-章动矩阵, 代表天球极在GCRS中的运动;R(t)为地球自转矩阵,表示地球绕天球自转轴的自转;W(t)为极移矩阵。地球自转矩阵R(t)反映地球实际自转的信息,与世界时的准确值相关。世界时的预测精度直接影响转换模型的准确度,进而影响卫星轨道的误差[2]。
空间飞行器在进行坐标系转换时,由于使用的是地球定向参数(Earth Orientation Parameters,EOP)预报值,参数预报误差必然会影响坐标系的转换误差,进而对轨道预报结果引入误差。坐标系转换时需要使用预报参数,这会对轨道预报精度产生影响。EOP预报误差对卫星轨道预报的影响随预报时间增长而振荡变大,预报1天的世界时误差最大约0.4ms,对应的卫星轨道误差(主要为卫星轨道的切向和法向误差)约0.23m±0.18m,最大误差达1m;预报7天的世界时误差最大约1.24ms,卫星轨道误差约0.44m±0.36m,最大误差可达到2.5m;对于长期(110天)的轨道误差可达十几米左右,且该误差主要由世界时的预报误差引起[1]。
随着深空探测飞行器等领域的精密定轨对时间测量系统的需求与日俱增,精确的世界时测量成为一项亟待解决的问题。目前,世界时信息主要通过国际地球自转与参考系服务组织(International Earth Rotation and Reference System Service,IERS)以月报和周报的形式公布。IERS组织通过甚长基线干涉测量技术(Very Long Baseline Interferometry,VLBI)测量与分析计算得到世界时参数,该技术的世界时测量精度可达数十微秒(μs)量级,但该方法的实时性相对较差,1天仅获取1个世界时参数,且需要全球布站,信息发布权掌握在IERS国际组织中。随着现代空间导航和深空探测等技术的不断发展,对世界时的及时性及测量精度要求越来越高,有的应用甚至需要实时的世界时计算结果,通过IERS获取的世界时参数无法满足应用需求。
地球定向参数激发源众多,且激发源又含有多种不确定性和时变性,其中包含长期的线性趋势变化、周期性变化,利用现有观测系统无法实时获取地球自转参数。为了解决这一问题,亟待对已有 EOP资料数据进行丰富,提出新的测量手段。
随着光学陀螺技术的日益成熟,采用高精度光学陀螺测量世界时成为一种新的方法。与传统测量方法相比,与地球固联的大型光学陀螺(直径大于0.5m,可以实现理论上更高的测量精度)在随地球自转运动的过程中可以实时测量地球瞬时自转角速度,通过建立地球自转角速度与世界时的对应转换关系,将大型光学陀螺的高精度角速度输出转换为高时间分辨率的世界时参数,为世界时参数的获取提供了一种新的测量方法。
1 用于世界时测量的高精度光学陀螺研究现状
1.1 大型激光陀螺研究现状
德国慕尼黑大学的Schreiber教授从1998年开始在德国Wettzell天文观测站建造了一个名为GRing、大小为4m×4m的环型激光陀螺,自2010年起可测量到地球自转轴的Chandler摆动,理论计算日长精度可达到0.13ms。基于该大型激光陀螺,Schreiber教授已开展了采用大型激光陀螺来测量世界时的工作,并计划全球布站来进一步提高其测量精度。
意大利的Hurst等于2008年对大型激光陀螺G-Pisa进行了研究,用于地球自转监测,包括地极运动、大气和海洋角动量、地球固体潮汐与海潮负荷等内容,同时也开展了基础物理效应(参照系拖动和其他相对论岁差)方面的研究。Di Virgilio等讨论了在地球上采用大型光学陀螺探测引力波与磁场之间效应(Gravito-magnetic Effect)的理论和可行性,并于2012年开始GINGER计划(Gyroscope in General Relativity),通过3个大型激光陀螺构成正八面体(边长6m),监测地球自转。2016年,欧盟的ROMY建成,由4个大型激光陀螺构成金字塔(边长12m),用于测量世界时和旋转地震等[3]。
1.2 大型光纤陀螺研究现状
美国Honeywell公司从20世纪80年代中期开始研制光纤陀螺,研制的高精度光纤陀螺已用于战略导弹、飞船导航和战略潜艇等领域。在 “参考级” (零偏稳定性优于0.0001(°)/h)高精度光纤陀螺方面,Honeywell公司致力于发展光源相对强度噪声的抑制技术、光纤陀螺精度长期保持技术等。2016年,Honeywell公司研发的 “参考级”光纤陀螺样机[4]的陀螺敏感组件如图1所示。对 “参考级”光纤陀螺的测试数据进行分析,随机游走系数达到 1.6×10-5(°)/h1/2,Allan 方差分析结果如图2所示。计算得到其积分周期为100s的零偏稳定性约为 9.6×10-5(°)/h(1σ), 可应用于计量学、地震学、结构传感领域,也可以作为其他惯性测试设备的基准。

图1 Honeywell公司 “参考级”光纤陀螺敏感组件Fig.1 “Reference grade” FOG sensing loop assembly developed by Honeywell
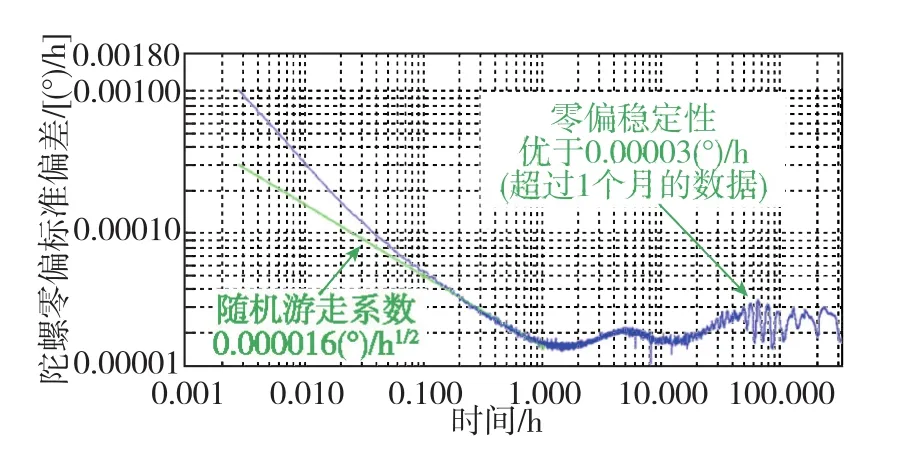
图2 Honeywell公司 “参考级”光纤陀螺Allan方差曲线Fig.2 Allan variance curves of“reference grade” FOG developed by Honeywell
法国iXBlue公司具有三十多年的光纤陀螺研制历史,科研生产实力雄厚且应用广泛。2016年,iXBlue公司在美国召开的光纤陀螺40周年会议上报道,其生产的陀螺放置在温度控制的实验室环境中经历38天的静态测试,其随机游走系数达3.8×10-5(°)/h1/2, 计算得到积分周期为 100s 的零偏稳定性约为 0.00023(°)/h(1σ)[5-6]。
2020年5月,由iXBlue公司开发的blueSeis-3A旋转地震仪已成功安装在加利福尼亚州的伯克利地震实验室中。该系统安装在伯克利数字地震台网的Byerly地震记录库中,并与标准地震仪配置,用于六自由度计算。自安装以来,blueSeis-3A在使用的第一天就在120km距离内记录了4.1级地震,实现了高精度光纤陀螺在地震监测中的应用[7]。
1.3 用于世界时测量的大型光纤陀螺潜在优势
相比于大型激光陀螺,大型光纤陀螺具有如下优点:
1)环形激光陀螺的激光腔体介质为气体,一般采用He-Ne气体,对环境温度、气压等变化敏感,对密封技术要求极高。而光纤陀螺的介质是全固态介质,一般采用光纤,对环境敏感较低,也易于用于构建大型陀螺。
2)气体环形激光陀螺是光波谐振干涉原理,探测对象是双向谐振光波的谐振模式频率差,在极低转速情况下容易发生模式简并,不适应于全球范围内工作(如低纬度地区)。而大型光纤陀螺采用光波传输干涉原理,探测对象是双向传输光波的相位差,不存在探测盲区。同时,如突破非线性光波干涉、超导探测等技术可使陀螺的灵敏度大幅提升,显著提高地球转速测量精度。
3)相对于激光陀螺,光纤陀螺寿命更长(不少于10年)、维护更少,适合以年为单位的长期观测。
4)相比于激光陀螺,光纤陀螺中光纤环的绕制难度要低于激光谐振腔的加工难度,可制造性强。
2 应用于世界时测量的高精度光纤陀螺关键技术
大型高精度光纤陀螺面向世界时测量的应用需解决的关键技术包括:降噪技术、大环绕制技术、参数长期稳定性技术等。
2.1 高精度光纤陀螺降噪技术
光纤陀螺的噪声特性与普通机械式陀螺不同,光纤陀螺的精度随积分时间的增大而提升,高速采样下的噪声较大,尤其在高精度光纤陀螺替代传统机械陀螺的领域中该问题比较突出。因此,需突破高精度光纤陀螺的噪声抑制技术。
针对 “参考级”高精度光纤陀螺,噪声抑制技术可以分成电路和光路两个方向:电路上,采取的降噪方法主要有探测器信号低通滤波和多点采样降噪等;光路上,降低陀螺的光源强度噪声可显著提升陀螺的信噪比[8-9]。
近年来,国内外均有采用半导体光放大器(Semiconductor Optical Amplifier,SOA)进行光源相对强度噪声抑制的相关报道[10-12]。SOA在结构上由有源区和无源区构成,基于受激辐射或受激散射原理来实现入射光信号放大,其光学增益通过泵浦电流在有源区产生载流子粒子数反转建立。
光信号在被放大的同时将引起SOA中载流子的消耗,因而会出现增益随注入光功率增大而减小的现象,即增益饱和。如图3所示,当输入功率较小并在SOA线性区域内时,噪声被放大;而在增益饱和造成的非线性区域使用光放大器,会对光功率的波动进行压缩,与通常的线性放大器相比,可以降低噪声指数。

图3 SOA增益饱和示意图Fig.3 Diagram of SOA gain saturation
通常的SOA抑制光源相对强度噪声方案为:在光源和光纤陀螺其他光路之间增加SOA,通过调整光源输入光功率、SOA的驱动电流和温控工作点使SOA工作在饱和放大区,降低光源进入光纤陀螺的相对强度噪声。
但在SOA实际使用中,低偏的掺铒光纤光源(消光比<0.1dB)经由SOA放大后,光源消光比通常达1dB~3dB。图4为某半导体光放大器输出光波在不同输入光功率、不同驱动电流下的消光比变化情况,消光比最大约1.8dB。这对于光纤陀螺尤其是 “参考级”高精度光纤陀螺来说,导致光纤陀螺的偏振误差、强度型误差、振幅型误差等变大,导致零偏精度等指标劣化。
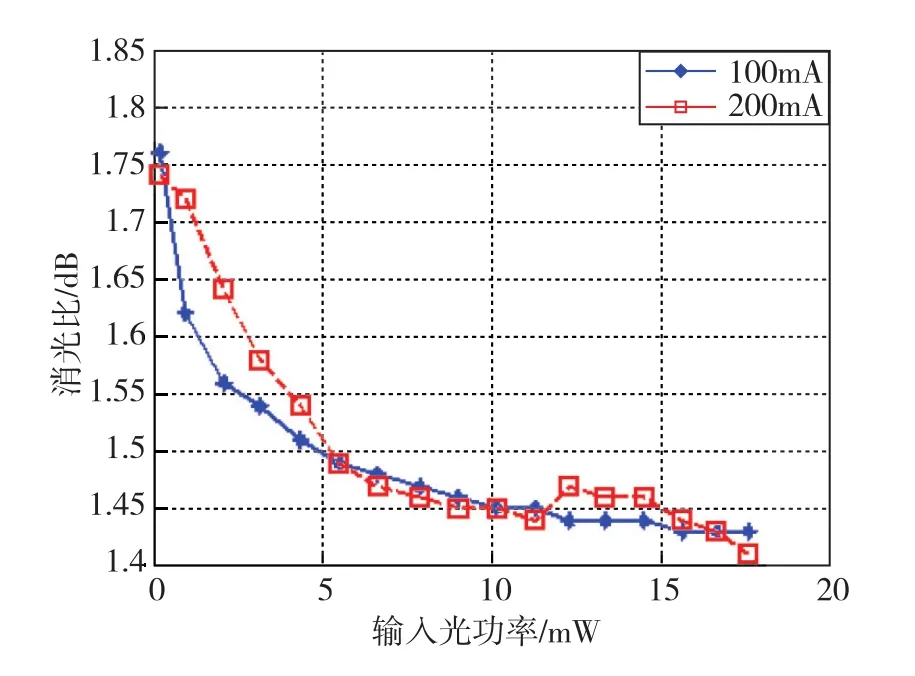
图4 不同驱动电流下半导体光放大器输出光的消光比Fig.4 Extinction ratio of SOA output light under different driving current
此外,SOA器件对光源输入不同波长下的增益并不均匀,1530nm的增益与1560nm的增益差异超过1dB,这将导致宽谱掺铒光纤光源经过SOA后谱型发生变化,即光源平均波长、谱宽等指标发生变化,同时其温度特性也发生变化,影响光纤陀螺的标度因数性能和零偏性能。
考虑到上述问题,本文提出了改进型半导体光放大器抑制光纤陀螺RIN噪声的方案,如图5所示。在半导体光放大器的增益平坦谱区域,掺铒光纤光源后增加相应的Gauss光纤滤波器,掺铒光纤光源经过半导体光放大器后,增加消偏器,偏振光经过消偏器后实现光源的低偏振光输出,光波的消光比从1.8dB降低至小于0.1dB,既实现了 “参考级”高精度光纤陀螺混偏技术方案对光源的消光比要求,满足光源光谱的稳定性要求,也实现了对光源相对强度噪声进行有效抑制,相对强度噪声实测最高达6dB,较大程度地提升了陀螺的信噪比和精度水平。

图5 改进型半导体光放大器抑制光源相对强度噪声方案Fig.5 An improved module for suppressing RIN of the light source employing SOA
2.2 高精度光纤陀螺光纤环绕制技术
应用于世界时测量的大型光纤陀螺保偏光纤长度达到数十千米,与高性能Y波导集成调制器等一起构成Sagnac干涉仪。因此,需重点关注大尺寸、超长光纤陀螺的互易性,从Shupe效应、结构形变、光纤偏振、胶粘剂蠕变等方面进行深入误差分析,同时针对大直径的光纤环,需研制专用大型光纤绕环机,实现大型绕环机的特定绕环工艺,降低大型光纤陀螺对温度和温度变化率的灵敏度。
(1)超长陀螺应力分布均匀性控制技术
在陀螺左旋和右旋光纤的交叉点处,存在应力集中点,该点不仅影响陀螺的对称性、模型的准确性,同时也是影响陀螺长期稳定性的关键。光纤所受应力引起其折射率变化,进而引入相位误差

式(2)中,υ为光波速度,dF/dt为应力时间变化率,dn/dF为光纤折射率随应力的变化率,l为光纤长度,z为光纤受力点。
同时,该交叉点还是引入偏振交叉耦合误差的重要因素,其引入的相位误差可以表示为

式(3)中,ε为偏振抑制比,h为衡量光纤偏振保持能力的参数(典型值一般在10-6/m量级),N为偏振交叉耦合点的个数。
基于上述原因,陀螺中应力分布均匀性和对称性是一项关键指标。在常规陀螺的研究中,可以采用分布式光纤应力分析仪对陀螺的应力特性进行研究,分析其对称性及对陀螺的影响。在超长光纤陀螺中,光纤环长度达几十千米,光信号损耗较大,光纤中光信号微弱,应力分析仪无法从中辨识Brillouin频移的大小,从而无法给出光纤中的应力分布情况。超大直径使光纤张力控制难度大,生产的长周期特点又会引入额外的控制误差,分析其应力分布特点及造成该特点的机理更复杂,难度更大。为减小陀螺的应力误差,应从应力平稳性要求反推张力控制要求,通过计算局部控制张力对陀螺其他部分施加的力及其对陀螺的影响,提出张力控制方案。同时,对陀螺进行相向两束光的相位差测试,利用权重最大的末端光纤进行应力补偿,以获得稳定的超长光纤陀螺。
(2)超大超长光纤环绕制技术
超大光纤陀螺追求较高的互易性和稳定性,因为尺寸远超过普通的光纤陀螺,实现方法大有不同,其中绕环机的驱动控制系统与精密排纤控制等是大型光纤陀螺用光纤环的重点和难点。
大型绕环机的各部件体积大、质量大、回转惯量大,为保证光纤绕制过程张力的平稳,需要绕环机的回转轴及平移轴在驱动电机的驱动下快速响应,并同步协调工作,所需要的驱动电机也要具备足够的转动惯量和扭矩。另外,达到相同的线速度,电机的转速更低,为获得低速工作条件下的稳定性,需对电机及减速机进行针对性改进和研究。
光纤环精密绕制时,需要对光纤在整个光纤环骨架轴向和圆周方向的排列位置进行精确控制,控制精度至少需要优于0.02mm,控制精度并不能因骨架尺寸增大而降低要求。因此,骨架尺寸的增大会导致整个光纤环整齐排纤控制难度显著增大,需对大尺寸光纤环的精密排纤控制技术进行深入研究。
2.3 高精度光纤陀螺参数长期稳定性问题
应用于世界时测量的大型高精度光纤陀螺需重点解决参数长期稳定性等问题,实现关键技术突破,以满足对世界时的长期、稳定观测。
(1)光纤环参数自动匹配技术
光在光纤环中的渡越时间与光纤陀螺电路控制的调制信号时间(方波调制的半周期)存在一定的对准误差,该对准误差导致光纤陀螺干涉信号存在尖峰信号,最终导致光纤陀螺产生零偏误差。
在长寿命周期内,光纤陀螺的光纤环伸缩、长度漂移等因素会引起光纤陀螺渡越时间对准误差发生变化,从而引起光纤陀螺零偏漂移。因此,减小光纤陀螺中渡越时间对准误差引起的零偏漂移对提高光纤陀螺环境条件下的精度具有重要意义[13]。
通过对渡越时间误差引起的相位差进行解调以精确控制光纤陀螺的分频模块,从而可消除高低温下由于渡越时间对准误差引起的光纤陀螺零偏漂移。具有光纤环渡越时间补偿功能的光纤陀螺原理框图如图6所示。

图6 光纤环参数自动匹配技术原理框图Fig.6 Block diagram of automatic matching technology for fiber coil parameters
(2)光纤陀螺共模参数引起零偏漂移抑制技术
在闭环光纤陀螺中,若陀螺的电子元器件性能参数产生漂移,不同调制时刻的前项通道增益将发生变化,则在陀螺控制回路中引入了误差量,导致高精度光纤陀螺产生零偏漂移[13]。
调制通道的电信号施加在光纤陀螺的Y波导的正反两个电极上,在Y波导的两个电极所加的电压极性变化时,光纤陀螺的标度因数的符号发生正负对称变化,相当于光纤陀螺正反向旋转再差分输出,可有效抑制陀螺的低频漂移误差。Y波导极性转换差分通过信号处理器的时序信号,控制调制信号给Y波导施加的电压极性如图7所示。
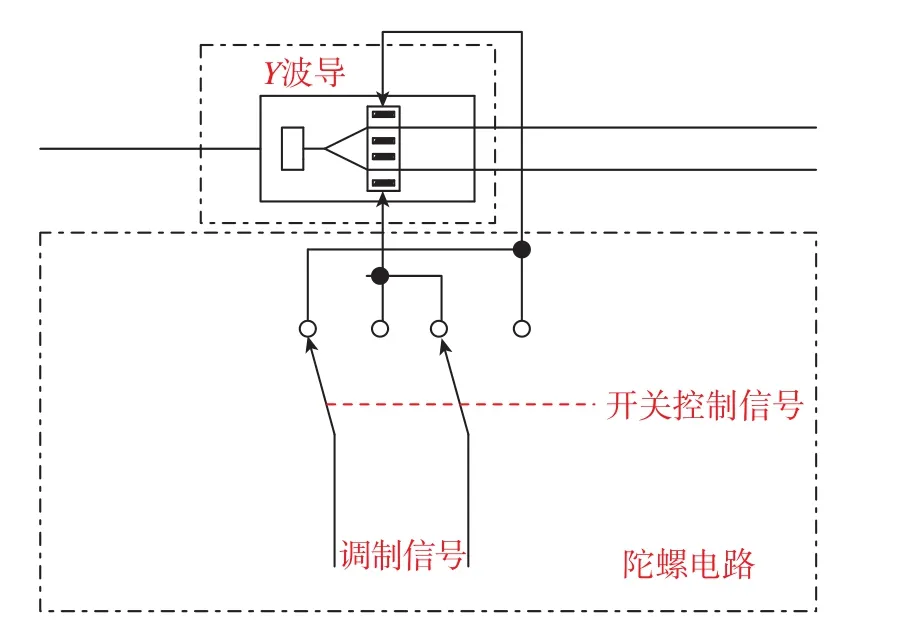
图7 Y波导极性转换差分调制示意图Fig.7 Schematic diagram of Y-waveguide polarity conversion differential modulation
由于环境下面产生的波动频率远远低于光纤陀螺回路信号频率,因而此过程中由上述因素导致的光纤陀螺的零偏误差在光纤陀螺回路周期内可以认为不发生变化。通过Y波导极性转换差分调制解调技术,消除温度、力学等环境因素以及长寿命周期内电子元器件参数漂移等引入的光纤陀螺零偏漂移,提高了大型光纤陀螺的长期参数稳定性。
3 用于世界时测量的大型高精度光纤陀螺实验验证情况
3.1 地球旋转角速度测量
本文解决了上述影响大型高精度光纤陀螺精度和长期稳定性的问题后,完成了大型高精度光纤陀螺的研制,陀螺的表头示意图如图8所示。为了实现更精确、更稳定地测量地球自转角速度,该陀螺安装于中国科学院国家授时中心的陕西蒲城地下实验室内,表头指天向,该测试环境具备恒温、恒湿、低噪声、低人为扰动等优点。

图8 应用于世界时测量的高精度光纤陀螺表头示意图Fig.8 Schematic diagram of high-precision FOG sensitive components used in universal time measurement
2021年4月23日~24日,在该测试环境下的高精度光纤陀螺天向零偏输出如图9所示。积分周期为 100s 的陀螺零偏稳定性达到 3.36×10-5(°)/h(1σ),陀螺数据的 Allan方差分析结果如图10所示。 陀螺零偏不稳定性达到了5.20×10-6(°)/h, 随机游走系数达到5.24×10-6(°)/h1/2, 比Honeywell公司报道的 “参考级”光纤陀螺噪声减小了67.5%,精度性能提升了2.1倍,实现了nano量级的地球自转速度测量水平。后续将进一步开展世界时的测量解算工作,可作为VLBI技术测量世界时的重要补充。

图9 高精度光纤陀螺测量地球自转角速度输出Fig.9 Output of the earth rotation angular velocity measured by high-precision FOG in this paper

图10 大型高精度光纤陀螺Allan方差曲线分析及对比Fig.10 Allan variance curves analysis and comparison of the large-scale high-precision FOGs
3.2 地震波测量
2021年5月22日02时04分11秒,青海玛多县发生里氏7.4级地震。在02时07分10秒和02时09分24秒时刻,在距离该震源上千千米的陕西蒲城地下实验室,本文的大型高精度光纤陀螺分别检测到该地震到达的纵波和横波信号的天向角速度分量。如图11所示,对于整个地震过程中纵波、横波引起的角速度分量的变化情况及持续时间均有较好的检测,这也依赖于该陀螺较好的动态性能。此外,该陀螺能够为地震预警、旋转地震测量、地球板块运动等应用领域提供崭新的科学方法。

图11 大型高精度光纤陀螺检测地震波的耦合角速度曲线Fig.11 Coupling angular velocity curve of seismic wave detected by large-scale high-precision FOG in this paper
4 讨论
目前,高精度光纤陀螺的精度水平已实现0.0001(°)/h(100s,1σ)~0.001(°)/h(1σ)范围, 在世界时测量等特定场合应用的光纤陀螺已实现3.36×10-5(°)/h(100s,1σ)。 在未来的 10 年~20 年内,光纤陀螺若要实现更高量级的精度水平,实现VLBI技术测试量级的世界时测量精度,其技术发展方向将呈多元化和精细化的态势。高精度光纤陀螺的未来技术发展趋势主要有以下几方面:
1)陀螺检测技术继续创新。随着量子光脉冲以及超导探测器等新技术的突破[13],高精度光纤陀螺可实现 10-5(°)/h(1σ)及可能更高的精度量级。若进一步突破非线性光波干涉技术、光原子混合干涉技术,高精度光纤陀螺的理论精度可能达到10-6(°)/h~10-7(°)/h(1σ)的量级精度水平[14-15]。 高精度光纤陀螺误差机理、噪声机理以及抑制方案是一个不断迭代和深化的螺旋过程,随着技术的不断突破,光纤陀螺的误差分析与技术方案将会逐渐提升与进步。
2)新器件及新材料的持续研发和应用。半导体光放大器、超导探测器等陀螺中的新器件以及理想化性能的特种保偏光纤等新材料为超高精度光纤陀螺研制提供了硬件上的支持。
3)设计方法、工艺方法和测试方法的不断优化。 对于精度为 0.001(°)/h(1σ)~0.01(°)/h(1σ)的中高精度光纤陀螺,常规设计方法、工艺方法和测试方法即可满足要求;但对于精度提升1~2个数量级的超高精度陀螺,其引入的影响将不可忽视,甚至成为影响精度提升的瓶颈。
此外,大型高精度光纤陀螺检测灵敏度更高,其高灵敏检测技术经转化后可测量电磁光、引力和角速度等多个物理场信息,在世界时精确授时、量子精密测量与导航、空间引力探测、表面科学和地震学等诸多领域具有广阔的应用前景。
