海上动目标打击中的人工智能辅助决策
2021-06-29王拓朱德政于翔
王拓 朱德政 于翔

摘要: 在海上动目标精确打击决策中,针对从发现、识别目标到摧毁目标的延迟时间长,缺乏最佳打击点决策依据的问题,在分析海上动目标的航行特点的基础上,对卡尔曼滤波算法进行了适应性改进,实时预测和修正海上动目标的位置和速度的联合概率分布;结合对延迟时间、杀伤效能等要素的分析,对计算结果进行人性化抽象,为决策者提供可靠的人工智能辅助决策依据。
关键词: 海上动目标; 精确打击; 人工智能; 决策理论
中图分类号:TP391.7 文献标识码:A 文章编号:1006-8228(2021)04-01-04
Abstract: In order to solve the problem of long delay time from finding and identifying targets to destroying targets and lack of decision-making basis of the best strike point, this paper analyzes the navigation characteristics of moving targets on the sea, improves the adaptability of Kalman filter algorithm, predicts and corrects the joint probability distribution of position and velocity of moving targets on the sea in real time; By analyzing the factors such as delay time and destruction efficiency, the calculation results are abstracted with humanizing, which provides decision-makers with a reliable artificial intelligence aided decision making basis.
Key words: moving target on the sea; precision strikes; artificial intelligence; decision theory
0 引言
在海上動目标精确打击作战中,由于卫星侦察情报信息与导弹最终命中目标之间存在较长的时间延迟[5],指挥员难以预判打击位置和打击效果。所以,如何最大程度地利用已有知识和情报数据,采用估计理论模型为指挥员提供可靠的参考信息,是一个值得深入研究的问题。
在人工智能的理性决策通用理论中,决策理论=概率理论+效用理论[1],本文充分利用海上动目标的航行特点信息和已知轨迹信息,在侦察信息的真空期,使用完全联合概率分布的数学方法进行推理[1],准确预判目标位置、速度的联合概率分布,结合打击武器杀伤效能和打击延迟时间,给出相应作战决策的作战效果预测和最佳打击决策建议。
1 航迹预测
海上动目标航行特点主要有以下几个方面,一是目标海上航行无地形起伏,可以近似为在二维平面上进行航行;二是目标通常是在运动状态,而且运动的速度较慢,典型的航速约为30节(约为55.5km/h);三是目标体型巨大,所以速度变化比较平滑,航行方向、速度不会产生剧变[2]。可以依照以上航行特点进行航迹预测建模。
1.1 位置、速度估计算法
针对海上动目标航行特点和卫星侦察信息特点,对卡尔曼滤波算法进行适应性改进,对目标的坐标点位、速度随时间的联合概率分布进行预测,并采用卫星侦察情报对预测结果进行修正。由于卫星侦察情报回传间隔时间较长、且存在较长的打击时延,本文采用预测值作为打击效果计算参考,消除指挥员情报真空期。
1.2 加速度估计算法
前述完成了对目标舰船的速度、位置预测算法设计,但并没有解决舰船转向、变速时加速度估计的问题,即如何确认公式⑴中[ut]的问题。由于舰船未来短时间内速度变化与当前速度变化强相关,所以可以用目标的有限记忆测量点[4]数据来预测目标运动的变化信息,并用舰船机动检测的方法,选择合理的有限记忆节点数量,以适应舰船航速、航向突变的情况。
如当前目标的航行速度变化平滑,可选取多个历史测量点(4~6个)进行加速度估计,如目标航速、航向发生突变,历史航迹点间相关性减弱,则可选取较少历史测量点(1~3个)进行加速度估计,减少加速度估计滞后。
2 打击效能分析
至此,完成了对目标的最佳位置估计算法设计,进一步根据人工智能决策理论,我们需要人工智能算法对舰船的位置在时间维度上的概率分布进行推理,结合打击武器毁伤效能模型,完成打击效果估算,为指挥员提供作战参考信息。
2.1 位置概率分布提取
本文中假设目标位置分布概率以预测点位为中心符合二维正态分布,且两个一维位置分量相互独立,即:
即二维概率密度函数为:
其中,对于有观测值提供参考的时间点,期望值[u1,u2]采用公式⑻中计算的最佳估计值,方差[δ21,δ22]直接从公式⑼协方差矩阵中提取;对于打击延迟时间区间,可采用公式⑴中的估计值作为期望值,从公式⑵中的协方差矩阵中提取估计位置方差。
2.2 毁伤程度数学模型
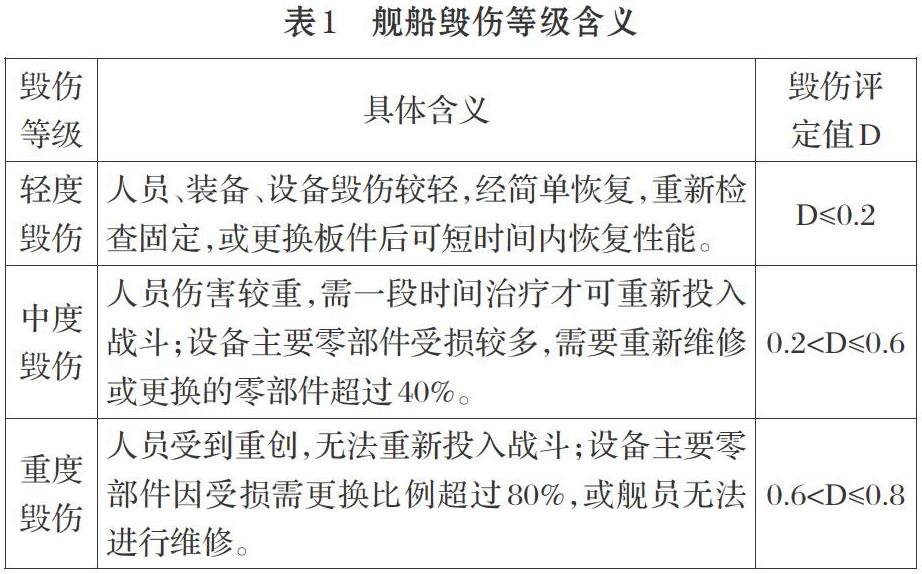
本文依据舰船功能的丧失和恢复能力,对舰船的毁伤划分为轻度毁伤、中度毁伤、重度毁伤和报废四个等级,给出毁伤评定区间,见表1[6]。
本文不评估战斗部对舰船毁伤能力,毁伤参数根据采用战斗部不同,直接作为模型输入变量,结合公式⒇得毁伤评定值公式:
3 仿真结果
本次仿真中设定回传卫星侦察信息每40秒回传一次且具有服从正太分布、标准差为30m的侦察误差,位置估计算法最小位置更新时间间隔为5秒。在仿真前半段展示了本文模型在有偵察信息辅助时,对侦察间隔期内航迹信息的补充效果;在后半段展示了在回传侦察信息消失后的情报真空期,本模型的航迹预测效果及其待完善方向。
如图1、图2所示,在仿真前半段,本模型可以较准确的预测回传侦察信息间隔中目标航迹信息;在后半段,如目标运行参数平稳,则如图1所示,本模型可以较为准确的持续预判目标航迹信息。假如目标航行参数产生剧变,如图2所示,由于没有回传侦察信息修正,本模型会产生较大的偏差。
本模型位置预测精度和目标位置概率分布变化,可由预测标准差表示,如图3所示,可以看出本模型标准差在有侦察信息修正时,标准差变小,在无侦察信息修正时,随时间推移,目标位置的分布概率会持续发散。采用标准差更能直观的体现出位置概率分布大概范围。
结合武器打击效能和舰船毁伤程度模型,形成人性化的数据抽象。决策参考信息包括:最佳落点及打击效能(人员杀伤、设备杀伤、舰体杀伤),如图4所示。
预测航迹不是随着时间逐点预测,而是直接显示未来全路径预测,之后随着回传侦察信息更新,因此可以直观的向指挥员提供未来任一时间点的最佳打击点位和打击效能预测,相比无依据下的打击决策,极大的充实了指挥员的决策依据。
4 结束语
本文依据人工智能的理性决策通用理论,使用完全联合概率分布进行推理,适应性改造卡尔曼滤波算法预判目标位置概率分布,引入记忆节点自适应估计速度与加速度,结合武器作战效能和毁伤程度模型为指挥员提供打击决策依据。
未来将对多弹协同时的多弹配合进行人工智能辅助决策分析,并在海上动目标航行特点上进一步研究,实现航行智能与打击智能的博弈推演,在对抗中进行深度强化学习的智能博弈对抗研究。
参考文献(References):
[1] Stuart J.Russell,PeterNorvig.Artificial Intelligence A Modern Approach[M].清华大学出版社,2013.
[2] 张雷,李瑛博等.卫星支援弹道导弹反航母作战研究[J].装备制造技术,2011.11:31
[3] Sinha A,Kirubarajan T,Bar-Shalom Y. Application of the Kalman-levy filter for tracking maneuvering targets[J].IEEE Transactions on Aerospace and Elecrtonic Systems,2007.43(3):1099
[4] 贺成龙,秦洪,于永生.一种空中目标航迹的自适应跟踪算法[J].深圳大学学报,2014.4:361
[5] 杜伟,李智.弹道导弹反航母仿真系统设计研究[J].计算机工程与应用,2006.42(29):226
[6] 宋成俊,周家胜,吴非等.舰炮弹药对舰船毁伤评估方法[J].兵工自动化,2017.3:69
