基于无人机倾斜摄影技术的三维塔式建模研究
2021-06-28张桂彬田庆操崔迎澳马红楷程照阳
张桂彬 田庆操 崔迎澳 马红楷 程照阳
摘 要:以郑州师范学院图书馆为研究对象,采用小型多旋翼无人机搭载单相机,以环绕式航拍方式和传统的井字形航拍方式两种途径获取图像数据,利用Agisoft PhotoScan对两种航拍方式获取的数据建立模型,通过对比,发现环绕式航拍方式用时较短,获取的有效点云数据较多,基于此方式建立的三维模型纹理更加清晰,但这种方式的使用受目标建筑周边环境的影响。
关键词:塔式建筑;无人机;环绕式航拍;三维建模
中图分类号:TP391.41;P231 文献标识码:A 文章编号:2096-4706(2021)01-0076-05
Research on Three Dimension Tower Modeling Based on
UAV Oblique Photography Technology
ZHANG Guibin,TIAN Qingcao,CUI Yingao,MA Hongkai,CHENG Zhaoyang
(Zhengzhou Normal University,Zhengzhou 450044,China)
Abstract:Taking the library of Zhengzhou Normal University as the research object,the small multi rotor UAV with a single camera is used to obtain image data in two ways,surround aerial photography and traditional well shape aerial photography. Agisof PhotoScan is used to establish the model of data obtained through the two aerial photography ways. Through contrastive analysis,it is found that the surround aerial photography takes a short time and obtains effective point cloud data is more than that of the other way. The texture of 3D model constructed based on this way is more clearer,however,the usage of this way is affected by the surrounding environment of the target building.
Keywords:tower building;UAV;surround aerial photography;three dimension modeling
0 引 言
多年以来的自然环境变化以及受多方面人为因素的影响,很多历史建筑遭到了破坏,这对历史建筑的保护更新工作来说是不可逆的,这让一些历史建筑失去很多有价值的信息[1]。为更好地保护这些文化遗产,避免巴黎圣母院的悲剧再次发生,采用倾斜摄影技术建立古建筑三维模型可为古建筑的研究、修复、重建等工作提供有力支持。
广义上讲,建筑的任意边长与高的比小于1的建筑都可以称为“塔”式建筑。相对于传统建筑,塔式建筑的纹理结构更加复杂,由于传统的无人机拍照方式拍摄时摄像头的位置固定,拍摄过程中可能出现观测盲区,使得采集的信息不全面,进而影响三维建模。
基于传统建模方法的AutoCAD建模、3Dmax建模、SkecthUp建模成本较高,无法实现较高程度的自动化,因而难以解决复杂地理场景建模的相关问题。近年来,无人机技术、倾斜摄影测量技术的日益成熟极大地推动了三维建模的发展[2]。本文将就塔式建筑三维建模问题展开讨论,通过对比环绕式航拍方式和传统的井字形航拍方式,探究更适于塔式结构建筑在三维建模过程中采用的航拍方式。
1 倾斜摄影与三维建模
1.1 倾斜摄影测量技术
随着计算机视觉技术和多传感器集成技术的迅速发展,倾斜航空摄影测量技术应运而生,它摆脱了传统竖直航空摄影系统受空间摄影姿态的束缚,能够很好地获取地形、地物的顶部与侧面的纹理信息,影像信息数据较大,利用多视角倾斜数码相机或单镜头旋转相机,在不同角度获取目标物对应的影像,所拍摄的影像具有丰富的纹理信息数据,可以生成密集三维点云和TIN格网模型,能在实际应用中对实景建模模型快速地进行自动化处理[3]。
倾斜摄影技术突破了传统的正射影像只能从垂直角度拍摄的限制,操作者可通过搭载了多台传感器的飞行平台,同时从一个垂直、四个倾斜、五个角度采集影像,能更加直观地观看真实世界。相较于传统的正射航拍,倾斜摄影可以多角度采集建筑的纹理细节,能够在后期三维建模中更为直观地展现建筑的特征。
1.2 路线规划
路线规划前,应先确定需要拍摄地点的坐标系统和高程基准,记录无人机传感器的类型,设置影像的重叠度、影像拍摄间隔以及分辨率,提前布设好像控点[2]。本次实验分别采用环绕式多角度航拍和传统的井字形航拍这两种方式制定航拍路线。
如图1所示的環绕式航拍路线设置前需要先找到一个合适的兴趣点中心,其次根据建筑物的大小确定环绕半径,以确保最大限度地实现拍摄目标全面化。如图2所示的井字形航拍路线的制定需要事先确定无人机拍摄区域,一般以正方形为主,接下来确定飞机的航拍高度,保证飞机在飞行过程中不会碰撞建筑物。
1.3 技术原理
环绕拍摄方式是以某建筑物的中心为原点,让无人机以一个合适的半径环绕路线拍摄,要求航拍照片向上重叠度不小于80%,旁向重叠度不小于50%,整个航拍过程可以通过调节手柄变换相机的拍摄角度,拍摄覆盖范围仅仅围绕拍摄对象;传统的井字形拍摄方式是让无人机以图2所示的航线进行拍摄,每个拍摄阶段相机镜头固定,且不能用手柄控制调节相机角度,拍摄覆盖范围相对较大。
2 数据来源与处理
为了更好地探究两种无人机拍摄方式的区别,本次实验选择郑州师范学院图书馆为研究区域,图书馆作为郑州师范学院的标志性建筑,内含大量纸质书籍和电子书籍,于2008年10月建成,建筑面积达30 000平方米,东西向宽度约110米,南北向宽度约116米,高度约53米。
2.1 设备选取
本文选取了大疆御Mavic Pro无人机进行试验,无人机搭载相机采用的是一颗1 200万像素的航拍摄像头,可拍摄JPG和RAW格式照片;云台可变动范围为俯仰-90°至+30°;无人机搭配三节电池,能够充分保证拍摄过程的续航,满足了实验需要。
Agisoft PhotoScan是俄罗斯Agisoft公司研发的一款基于影像,可以自动生成高质量三维模型的3D扫描软件,借助多视图三维重建技术,它可以处理任意种类的照片,小到玩具模型微小照片,大到航拍巨幅照片,操作时只需在软件中导入具有一定重叠率的数码影像,便可生成高质量的正射影像及重建的三维模型[4]。
2.2 数据获取
获取倾斜数据的步骤主要分为测区踏勘、航线设计和飞行实施3个环节。首先需要进行实地考察,获取测区的地形;接着按照影像质量要求,设置飞行航高、重叠度,最后对整个航摄飞行方向进行航线规划[5]。
针对图书馆的建筑特点,通过飞行控制软件DJIGO 4规划环绕式拍摄路线,环绕式路线拍摄输入参数为:拍摄高度100米,以图书馆所在地高度为100米水平面的几何中心为环绕原点,环绕半径50米,航摄共采集该建筑820张图像,整个航摄过程环绕拍摄三圈,用时约15分钟。
通过传统的飞行控制软件Altizure规划航拍路线,井字形方式航拍路线输入参数为:航拍高度100米,航向重叠率85%,旁向重叠率85%,航摄过程共采集1 215张图像,整个过程用时约40分钟。
2.3 数据处理
根据摄影测量原理,Agisoft PhotoScan可以对拍摄图像的位置、坐标等信息进行计算,其内定向、相对定向以及绝对定向都可以自动完成,不需要人为干涉。利用该软件对图像数据进行处理的具体步骤为:
2.3.1 图像预处理
刚拍摄的影像由于可能会存在漏拍、色差严重、云雾遮挡、不合理曝光等不良状况,需要对其进行预处理,主要包括航拍照片质量检查、图像曝光度调整、图像增强、删除无法修复的图像等[5]。
2.3.2 对齐照片
将预处理的图像导入并“添加相机”,这里导入拍摄的影像数据的顺序必须依照航线走向且连续,中间不能有空洞,如图3所示。点击“对齐照片”按钮,软件就会根据航拍图像的坐标、高程信息以及相似度自动排列图像,并自动计算出相机和拍摄物体的相对位置,最终形成一些稀疏点云和相机的位置,如图4所示。
2.3.3 生成密集点云
密集点云是根据相机位置和图片本身生成的点云,这里需要根据生成的点云的分布位置,调整工作区域的范围大小,确保工作区域大于物体模型,生成的点云质量越高,对设备性能的要求越高,生成点云速度越慢,最后成像的质量也会越好。
其中环绕式航拍方式经过自动定向生成质量为“中”的点云数据,如图5所示。
2.3.4 生成网格
根据生成的密集点云数据,生成多边形网格模型,根据需要,生成网格模型的源数据既可以是“对齐照片”时生成的稀疏点云,也可以是密集点云。生成网格后可以根据需要对其进行编辑,环绕式航拍方式生成的网格如图6所示。
2.3.5 生成纹理
根据添加到软件的照片信息给拍摄对象贴图,Texture Type选择“纹理映射”,源数据选择“Images”,混合模式选择“马赛克”,纹理大小为4 096,生成纹理如图7所示。
3 对比分析
按照上述数据操作流程,分别得出环绕式航拍路线与传统的井字形航拍路线的相机对准位置,如图8和图9所示,可以看出环绕式航拍路线的相机角度存在大幅度的重叠,目标建筑周围点云分布较集中,没有太多冗余的点云;传统的井字形航拍路线的相机角度重叠度较低,目标建筑周围存在大量冗余的点云,点云的多少取决于处理数据量的多少,在一些大型工程中,多余的点云将会拖慢计算机处理速度,进而影响工程进度。
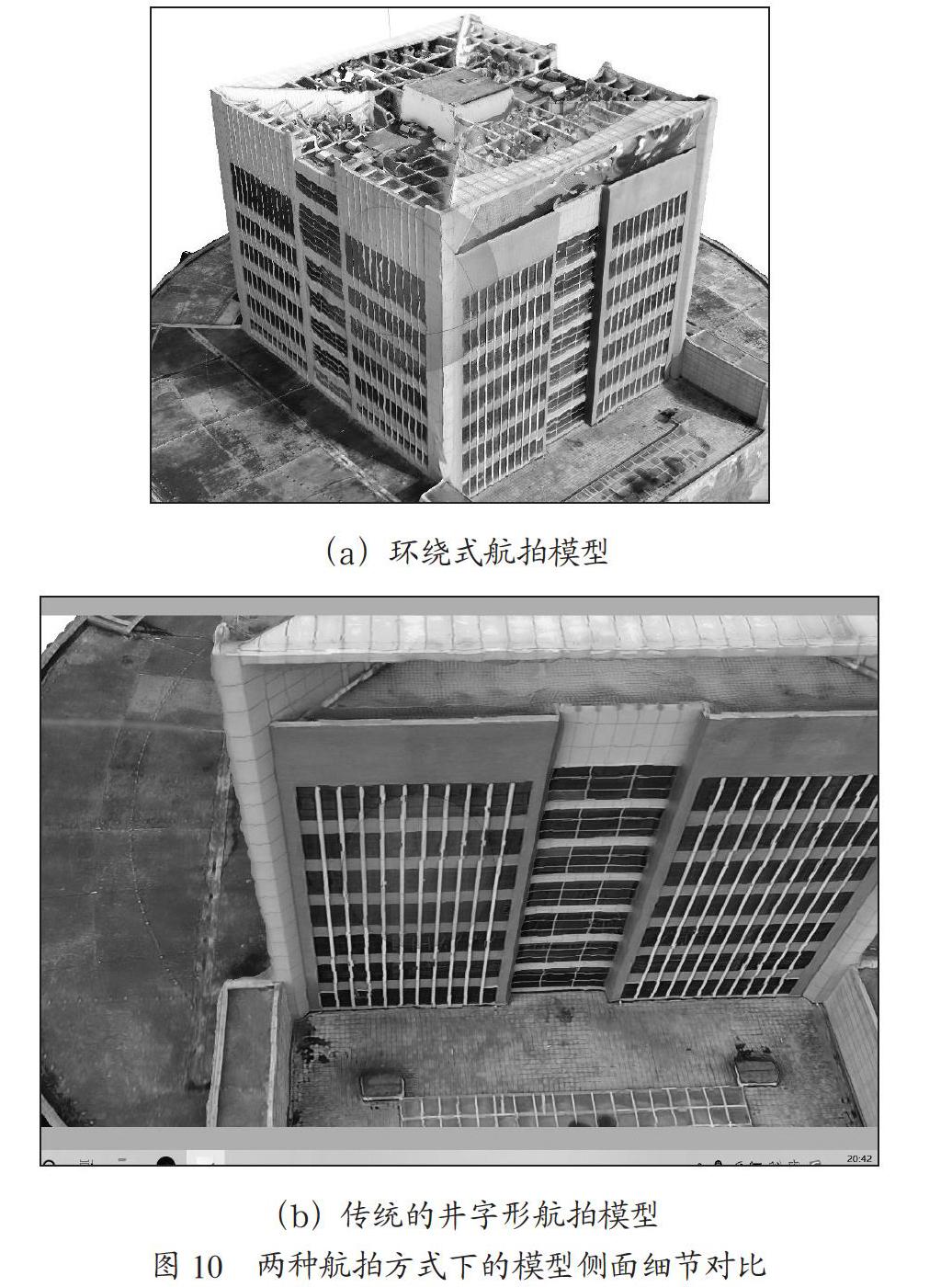
接下来对比环绕式航拍和传统的井字形航拍所生成的模型细节,从侧面来看如图10所示,可以发现环绕式航拍下的图书馆模型墙的棱角清晰,而传统的井字形航拍下的图书馆模型墙的部分纹理出现扭曲,建模效果略差;将图书馆红色墙面部分与实际建筑对比可以看出,传统的井字形航拍模式下的效果相对较好。
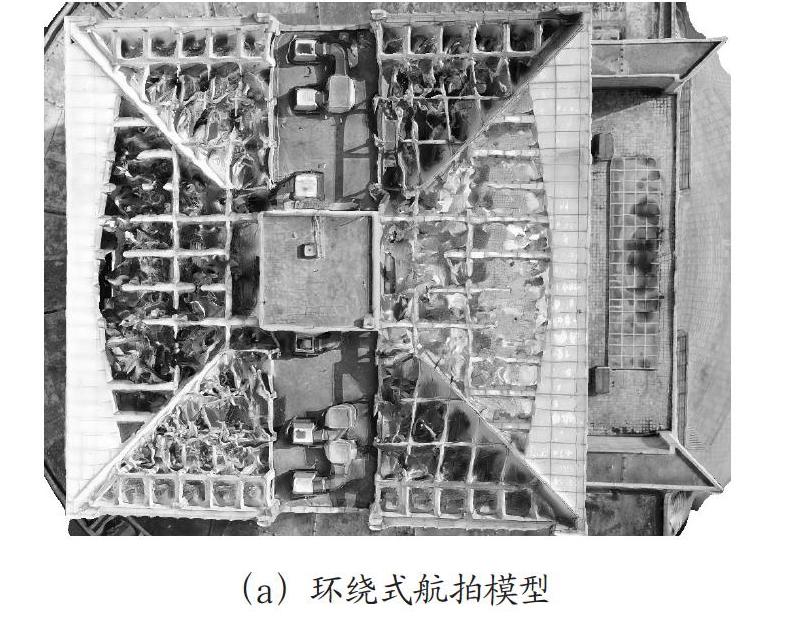
从顶部看如图11所示,可以看到环绕式航拍下的模型的顶部纹理细节较完整,体现在顶部设施的分布位置和结构与传统的井字形航拍模型相比更加清晰,能够直观地分辨出地物;环绕式航拍下模型顶部轮廓棱角分明,而傳统的井字形航拍模型顶部轮廓出现了弯曲现象,影响了模型质量。
4 结 论
本文以郑州师范学院图书馆为拍摄目标,分别采用两种无人机航拍方式,对比研究环绕式航拍方式和传统的井字形航拍方式的优缺点,具体表现在:
(1)时间方面。环绕式航拍方式用时通常较短,一般需要10~20分钟,传统的井字形航拍方式则用时较长,一般需要40~50分钟;
(2)点云细节方面。环绕式航拍路线是画圆,照片重叠度较高,所获取的图像数据生成的点云大部分集中在目标建筑上,井字形航拍路线是直线,照片重叠度相对较低,存在获取的点云数据距离目标建筑较远,造成数据冗余;
(3)模型本身细节方面。从侧面看,环绕式航拍建立的模型表面轮廓清晰真实,传统的井字形航拍模型存在部分纹理弯曲现象;从顶部来看,环绕式模型表面纹理清晰可见,传统的井字形表面纹理模糊不清。
综上所述,在塔式建筑的三维建模过程中,环绕式航拍方式更加节省时间,生成的点云数据不存在过多冗余,相同的数据量下建立的模型細节更优,是一种方便高效的航拍方式;但由于部分传统的塔式建筑周围存在其他建筑遮挡现象,环绕式航拍可能会给飞机带来安全隐患。因此,虽然环绕式航拍方式省时、高效,但是在选用环绕式航拍方式时还需要结合实际情况。
参考文献:
[1] 李佳烜,姜雪.数字技术在历史建筑保护更新中的应用探讨——以南满洲工业专门学校旧址为例 [C]//2019全国建筑院系建筑数字技术教学与研究学术研讨会.共享·协同——2019全国建筑院系建筑数字技术教学与研究学术研讨会论文集.重庆:中国建筑工业出版社,2019:380-384.
[2] 姚永祥,李佳,段平,等.面向塔式建筑物的无人机环拍三维建模方法研究 [J].地理与地理信息科学,2019,35(6):38-43.
[3] 苟彦梅,吴凯诺.无人机倾斜摄影测量技术在文物保护修复工程的应用 [J].科技视界,2020(28):29-30.
[4] 张小宏,赵生良,陈丰田.Agisoft photoscan在无人机航空摄影影像数据处理中的应用 [J].价值工程,2013,32(20):230-231.
[5] 邹娟茹,孙兴华.基于无人机倾斜摄影测量技术的三维校园建模 [J].科技与创新,2020(20):61-62.
作者简介:张桂彬(1999—),男,汉族,河南南阳人,本科在读,研究方向:地理信息科学;田庆操(2000—),男,汉族,河南濮阳人,本科在读,研究方向:地理科学;崔迎澳(2000—),男,汉族,河南登封人,本科在读,研究方向:地理科学;马红楷(2000—),男,汉族,河南鹤壁人,本科在读,研究方向:地理科学;程照阳(2000—),男,汉族,河南新乡人,本科在读,研究方向:地理信息科学。
