基于背包式激光雷达的天山云杉林单木因子估测
2021-06-08张文革曹姗姗
邱 琴,张文革,王 蕾,曹姗姗,孙 伟,
(1.新疆农业大学 计算机与信息工程学院,乌鲁木齐 830052;2.新疆天山西部国有林管理局,新疆 伊宁 835000;3.新疆林业科学院现代林业研究所,乌鲁木齐 830052;4.中国农业科学院农业信息研究所,北京 100081)
0 引言
在森林资源数量、质量及健康状况等方面的调查、监测与研究过程中,单木胸径、树高和冠幅等测树因子的获取至关重要,可为林地密度估计、生物量及碳储量估算、林地变化趋势分析、森林生长与收获预估等方面提供切实有效的科学依据[1-3]。传统的单木因子获取以野外调查和地面实测为主,费时耗力、自动化程度不高、效率较低,难以实现大尺度的森林结构参数连续性监测[4-5]。如何快速、精准、无损、低成本获取森林单木因子数据,对森林资源高效管理和科学决策具有重要的现实意义。
近10多年来,国内外许多学者开展了机载激光雷达系统单木因子估测的研究,进而估算了森林单木或样地尺度生物量[6-8]。与传统地面调查方法相比,不仅显著提高了单木因子估测精度,还减少了工作量、降低了劳动强度、有效提升了工作效率。Brolly等[9]通过三维激光扫描技术预测单木结构参数,建立DTM、树冠表面模型和树干模型,然后从模型中获得测树因子,通过精度分析发现,利用该方法测得的数据与传统方法的精度一致;Wallace等[10]使用无人机携带激光雷达通过对研究区内单株树木的识别,获取树木的位置、高度、冠幅等数据,利用激光点云估测样方尺度和单木尺度上的森林调查指标,得到了较高精度的调查结果;韦雪花等[11]利用TLS点云数据,通过体元模拟法,计算各立方格网内的点云并进行投影,统计投影个数得到树冠体积;Goodbod 等[12]采用无人机获取充分的机载激光雷达点云数据并建立生物量预测模型,证明了利用激光雷达对森林生物量进行预测具有较高精度;刘峰等[13]用机载激光雷达数据,采用回归模型估测中亚热带森林乔木层单木地上生物量,结果表明,以激光雷达获取的多种参数信息构成的模型相较于单一以林分树高为因子的传统回归模型,其估测精度明显提高。
天山云杉(Piceaschrenkianavar.tianshanica)是新疆天山地区涵盖范围最广、蓄积量最大、生态功能最为重要的针叶树种[14],在山地森林水源涵养与水土保持及林区生态系统的形成和维护等方面发挥着关键作用[15-16]。遥感为快速准确获取天山云杉林单木因子提供了有效途径,但现有研究多侧重于应用卫星遥感影像[17-18]、无人机可见光影像[19-21]获取天山云杉林树冠、密度、蓄积量等信息,对于激光雷达数据估测天山云杉林关键参数的研究鲜有报道。目前,机载LiDAR和地基LiDAR在林业资源监测方面的使用和研究较为广泛,但在外业活动采集数据过程中工作量较大、成本较高、数据分析处理较繁琐。背包式LiDAR具有真三维测量、成本低、易操作和覆盖广等技术特点,其数据采集时携带便捷、操作简单,不受天气、地形等外界环境因素的约束,测量范围易操控。作为一种新兴点云数据获取手段,背包式LiDAR在获取森林三维结构参数方面具有良好的应用潜力。但是,对于复杂地形条件下的天山云杉为代表的山地森林,背包式LiDAR数据的处理与分析方法及适用性有待进一步研究和验证。
本文以天山云杉为研究对象,使用背包LiDAR估测天山云杉的树高、胸径与冠幅面积,通过与样地的地面实测结合目视解译数据进行相关性分析与验证,建立背包LiDAR树高和冠幅变量之间的回归模型,以期为背包式激光雷达获取森林三维结构参数提供方法和应用参考。
1 材料与方法
1.1 研究区概况与数据获取
研究区为新疆西天山森林生态系统国家定位观测研究站(简称西天山生态站),位于天山西部那拉提山北麓,伊犁河谷中部,属于伊犁哈萨克自治州巩留县区域,地理坐标为43°03′~43°15′N,82°51′~83°06′E。研究区高差明显、起伏大,略呈三角形,地势东南高,西北低,海拔677~4 181m[22]。研究区呈典型的中亚温带大陆性半干旱特征,年均气温0.7℃,年降水量400~900mm,雨季集中在6—8月份,年蒸发量980~1 150mm,年均相对湿度65%。研究区内云杉林的单位蓄积量较高,每公顷高达800~900m3。在研究区通过背包式激光雷达采集实验数据,其地理位置如图1所示。
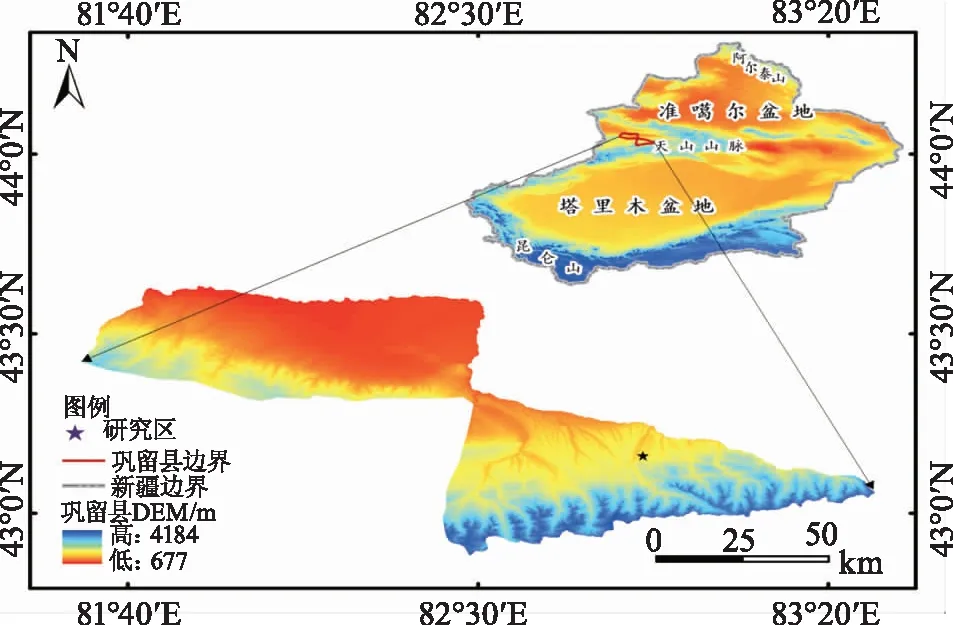
图1 研究区及数据采集地理位置Fig.1 Geographical location of study area and data acquisition
LiDAR数据采用LiBackpack D50背包式激光雷达设备于2019年10月12日至17日扫描获取。通过在水平和垂直两个方向分别设置激光雷达传感器,同时配置高精度GNSS设备,结合同步定位与制图构建SLAM(simultaneous localization and mapping)技术,获取扫描范围内的高精度三维点云数据。LiBackpack D50背包激光雷达采取自下而上的扫描方式,获取树干/枝叶详细的结构信息,具有扫描范围广、高效率、高精度、多平台、低成本和易操作等特点,其系统参数如表1所示。

表1 LiBackpack D50背包激光雷达扫描系统Tab.1 LiBackpack D50 Backpack LiDAR scanning system
以西天山生态站为中心,选取6个20m×20m的正方形样地进行背包雷达数据采集,其中:1号、2号和3号样地属于人工林,分别含有140株、82株和89株天山云杉;4号、5号和6号样地属于天然林,分别含有19株、15株和18株天山云杉。路径规划对背包激光雷达数据采集至关重要,合理的路径规划能采集到树木的完整信息,并减少数据冗余。针对20m×20m的样地,考虑树木分布比较密集,采用图2所示的路径规划(序号从小到大表示采集人员行走的路线顺序)。
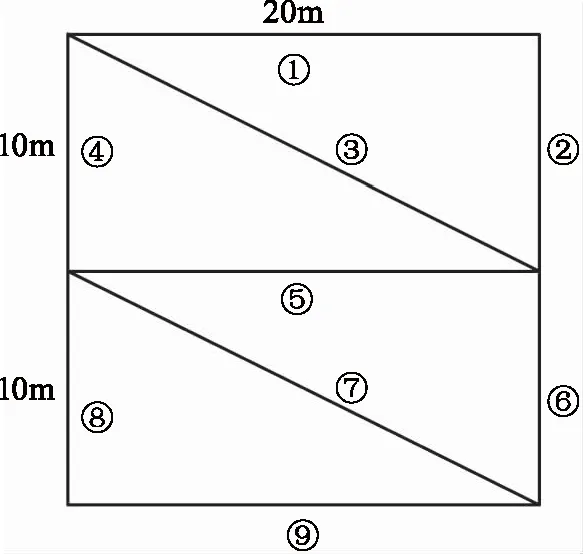
图2 行走路径规划Fig.2 Path planning
1.2 研究方法
通过LiDAR 360 V 3.2软件对样地的背包激光雷达点云数据进行预处理,包含的步骤为去噪、滤波、生成DEM、点云归一化。在此基础上,由图3所示,进行单木分割处理、胸径拟合和单木参数提取。背包激光雷达单木分割处理步骤如图4所示(序号(a)—(j)依次表示处理顺序)。
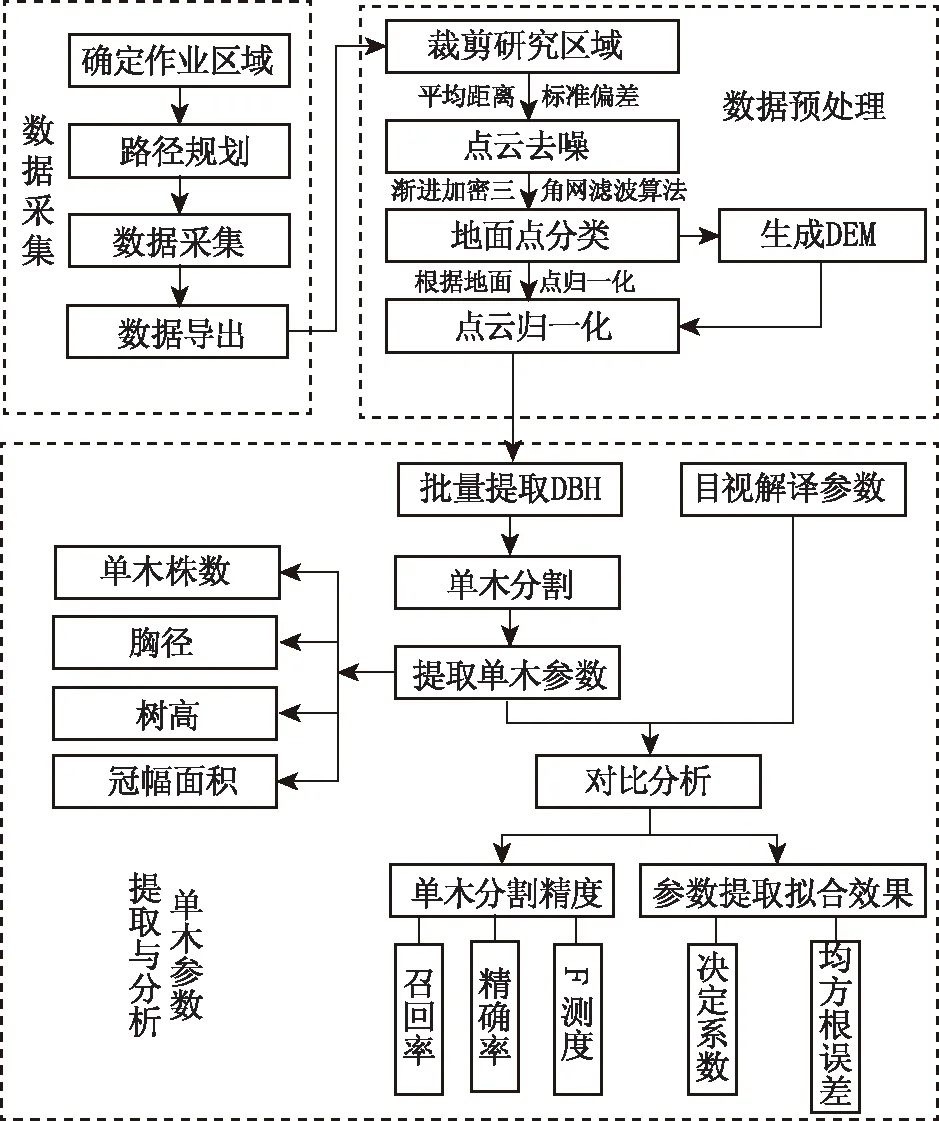
图3 背包激光雷达单木分割流程图Fig.3 Flow chart of single wood segmentation of backpack LiDAR
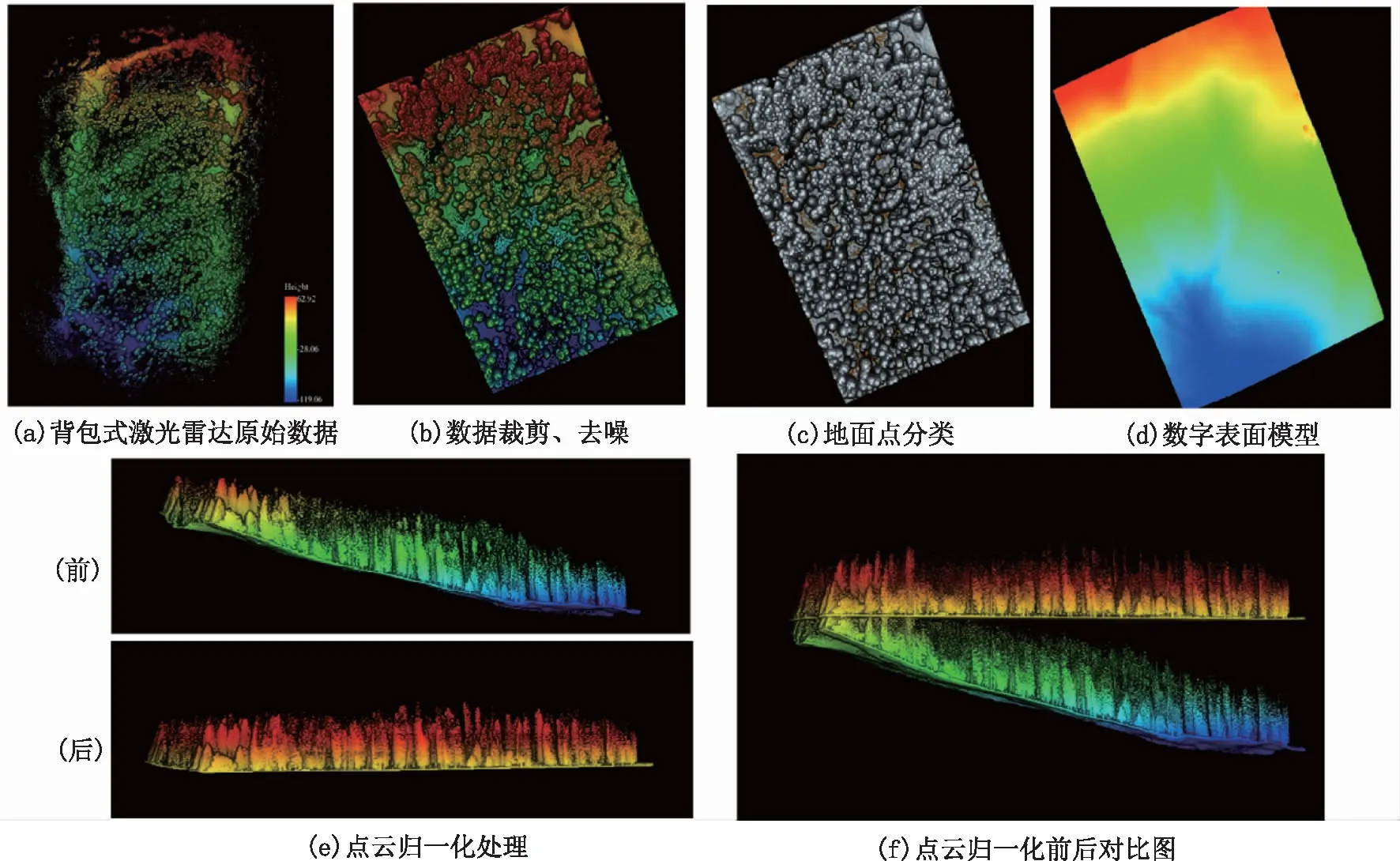
图4 背包激光雷达单木分割处理步骤Fig.4 The processing steps of single wood segmentation for backpack LiDAR
1.2.1数据预处理
首先,对原始数据的空中点、低于地表点(高位粗差及低位粗差)及孤立点等噪声点进行分类并去除,进而提高数据质量。其算法原理:对每一个点搜索指定邻域点个数的相邻点,计算点到相邻点的距离平均值,计算这些平均值距离的中值和标准差,如果这个点的平均值距离大于最大距离(中值+标准差倍数×标准差),则认为是噪点,将被去掉。其次,为减小地形起伏对树冠分割和树冠特征因子估测的影响,采用改进的渐进加密三角网滤波算法(Improved Progressive TIN Densification,IPTD)进行激光雷达地面点分类。包含点云格网化、选取种子点、使用种子点构建三角网和迭代加密三角网。最后,由于实验样地存在一定的坡度,树木点云起始高程不同,需要采用文献[23]中提出的方法,即:将点云高程归一化,以获得树木点云的相对高度,降低地形对单木树高估测精度的影响,去除地形对树高估测的影响。公式为:
Z高度=Z绝对-Z地面
(1)
式中:Z高度为归一化后各点高程;Z绝对为各点真实高程,即绝对高程;Z地面为各点临近的地面点高程。
1.2.2单木参数估测
估测背包雷达高程在1.3 m范围内的点云数据,采用二维Hough变换结合圆拟合的方法进行单木识别,并获取单木的胸径(DBH)值。根据树木生长特点还可以选择拟合椭圆和拟合圆柱的方式,即:如果树干为倾斜生长,可采用拟合圆柱的方法;如果树干呈现为椭圆,则可利用最小二乘拟合二维椭圆提取胸径信息。拟合完成后,对聚类出的树干进行置信度判断,并采用单木筛选完成对拟合结果的分析与检查,进而提高估测精度。同时,对点云数据进行归一化处理后,每个点的归一化高程值即为该点与地面的高度差,因此,通过获取单木点云数据的Z坐标,即可实现对树高准确的估测。
1.2.3参数估测的评价
1.2.3.1单木分割精度
通过地面调查结合目视解译值(以下简称实测值)的分析,分别获取分割后的树木总数、正确分割的棵数、错误分割的棵数、漏分的棵数,通过(2)—(4)式计算单木分割的召回率(R)、精确率(P)和F测度(F)的值。
(2)
(3)
(4)
式中:TP表示树木被正确分割,FN表示树木未被检测,FP表示错误检测。
其中:1)召回率(Recall)也叫查全率,针对数据集中的所有正例(TP+FN)而言,模型正确判断出的正例(TP)占数据集中所有正例的比例。召回率可表示树木的检测率,以单木识别为例,把背包雷达数据中的树木作为正例,召回率高,代表可以识别出更多的天山云杉。2)精确率(precision)也叫查准率,针对模型判断出的所有正例(TP+FP)而言,其中真正例(TP)占的比例。精确率可表示树木分割的正确率,以单木识别为例,精确率高,表示模型识别出的树木中基本正确,少量识别对象不是树。3)F测度(F)为精确率和召回率的调和平均数,从两个视角综合考虑错分和漏分的总体精度。以上三者的变化范围均在0~1之间。
1.2.3.2单木参数估测精度
单木参数估测的拟合效果采用决定系数(R2)和均方根误差(RMSE)2个指标进行评价。决定系数是用来表征方程对实测值的拟合程度;均方根误差用于评估拟合值与实测值的偏差,进而评价模型的回归效果。决定系数值越高,则实测值与估测值的相关性越强,拟合效果越好;均方根误差越小,则表明预测值的效果越好[24]。
(5)

(6)
式中:n为正确分割的单木数量;Xi为分割单木参数;xi为与分割出的单木对应的实测单木参数。
2 结果与分析
2.1 单木分割结果与分析
对于6个样地内的363株天山云杉,正确分割出320株,单木分割精度F值均大于0.90,平均值为0.93,精确率均值是0.96,召回率均值是0.90(表2)。各样地单木识别率都在80%以上,平均为86.61%,总体精度较高,但漏分现象普遍存在。通过分析点云数据后发现,人工林的识别率略高于自然林。人工林识别率均值为88.48%,天然林识别率均值为84.74%。因为人工林幼树较多,分布规整,树木间距较为整齐,林下灌木杂草偏少,因此识别率较高;而天然林树高整体较高,林下灌木杂草较多且密集,很大程度上影响了对树木的识别与分割。此外,由于样地林分郁闭度较高,树冠之间遮挡和竞争造成树冠信息获取不完全,对背包激光雷达单木分割结果产生了一定的影响。
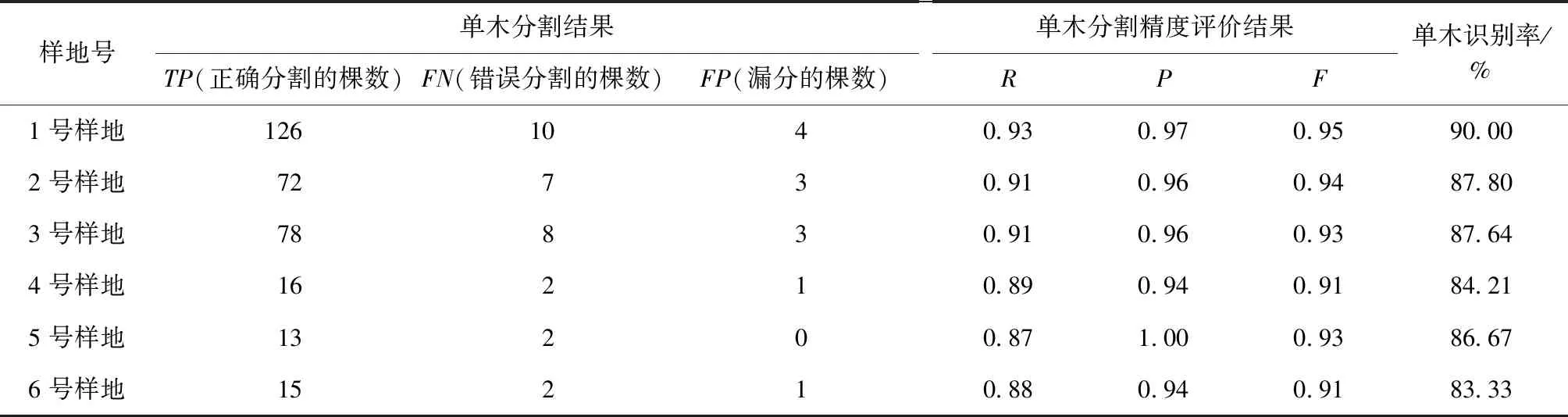
表2 背包激光雷达单木分割验证Tab.2 Single-wood segmentation verification of backpack LiDAR
2.2 胸径估测精度结果与分析
研究区6块样地单木胸径的背包式激光雷达估测值与实测值的回归关系(图5)表明,胸径估测值与实测值线性相关性较为明显。在基于点云数据估测单木胸径时,若胸径位置处无灌木、杂草和树枝树叶等遮挡,估测精度较高,但如有杂物干扰,会对胸径估测的拟合圆算法产生不利影响,导致拟合圆偏大,进而无法实现单木胸径的精准估测。6块样地决定系数R2均大于0.90,最低是0.923 7,最高值可达0.987 3,但在人工林和天然林中差异较为明显。3块人工林胸径集中分布在5~25cm内,R2均值为0.939 9;RMSE均值为1.11,最低为0.89,最高为1.38。天然林胸径集中分布在30~120cm内,R2均值为0.972 7;RMSE均值为4.03,最低为2.55,最高为5.02。人工林和天然林之间的误差:一方面,可能是人工林的胸径分布较为集中,天然林胸径分布差异较大造成;另一方面,由于单木树干不成标准圆形或者呈现畸形,采集的点云数据成畸形,导致拟合胸径的结果中不正确或误差较大。结果说明,利用背包式激光雷达估测单木胸径具有一定可靠性,可以获取精度较高的点云数据,但对于形状复杂的树干,其胸径估测精度略低。
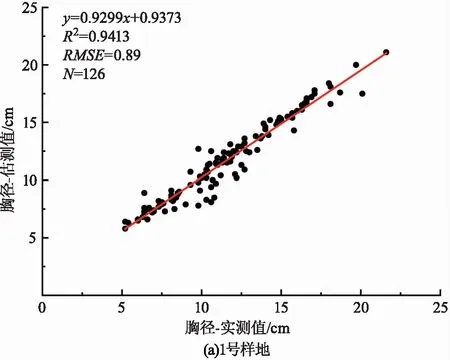
图5 6块样地胸径实测值与估测值回归关系图Fig.5 Relationship between measured and estimated values of diameter at breast height of 6 plots
2.3 树高估测精度结果与分析
研究区6块样地单木树高的背包式激光雷达估测值与实测值的回归关系(图6)表明,6块样地决定系数R2均在0.90以上,最低为0.903 6,最高可达0.998 5,RMSE均值为1.05,具有较好的拟合和预测效果。人工林树高普遍较低,集中分布在3~18m内,3块人工林R2均值为0.936 6,RMSE分布均衡,均值为0.49。天然林树高较高,集中分布在20~40m内,3块天然林R2均值为0.981 3;RMSE均值为1.61,最低为0.57,最高为3.02。林分密度是导致人工林和天然林之间差异的重要因素,在林分密度低的人工林条件下,LiDAR很容易探测到树木的顶端部分,从而估测树木高度值。在林分密度较大的天然林条件下,受到树枝和相邻树木的部分遮挡,LiDAR难以准确地探测到树木顶端部分。结果表明,树高实测值与估测值的相关性较高,说明,利用背包式激光雷达对单木树高进行估测具有较高的可行性。
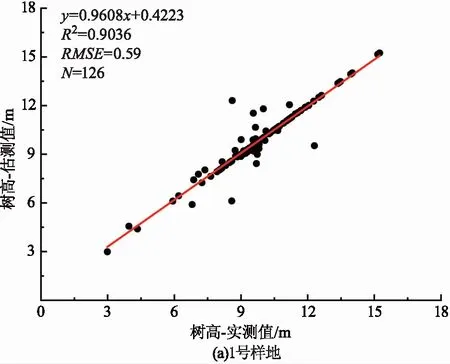
图6 6块样地树高实测值与估测值回归关系图Fig.6 Relationship between the measured and the estimated values tree heights of 6 plots
2.4 冠幅面积估测精度结果与分析
研究区6块样地单木冠幅面积的背包式激光雷达估测值与实测值的回归关系(图7)表明,6个样地R2均大于0.80,均值为0.862 7,最小值为 0.835 6,最大值为0.895 5;RMSE均值为3.21。3块人工林冠幅面积集中分布于2~14m2内,R2均值为0.861 1,RMSE均值为1.2,3块样地之间差异不大。3块天然林冠幅面积集中分布于20~60m2内,R2均值为0.864 2;RMSE均值为5.23,最小值为4.13,最大值为 5.96。分析发现由于背包式激光雷达设备的空间采样率较低,并且树木和杂物之间的遮挡,导致未能获取树冠顶部完整的点云数据。结果表明,利用背包式激光雷达估测的冠幅面积的精度与胸径和树高相比较低。由于背包式激光雷达获取的树冠顶部数据不完整,极大程度上影响了树冠的估测精度。分布不规则的天然林误差明显高于分布规整的人工林。
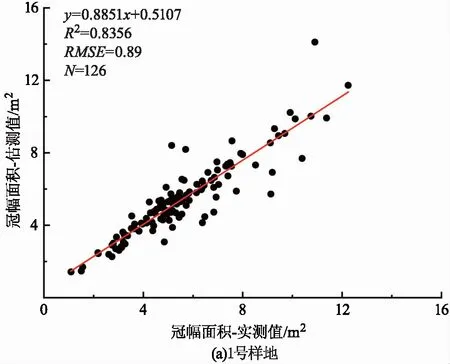
图7 6块样地冠幅面积实测值与估测值回归关系图Fig.7 Relationship between measured and estimated crown area of 6 plots
3 结论与讨论
以西天山生态站6块天山云杉林样地作为研究区域,基于背包式激光雷达进行天山云杉林单木因子估测,单木识别率平均为86.61%,单木分割精度F值均大于0.90,精确率均值是0.96,召回率均值是0.90,总体精度较高。单木胸径和树高估测结果决定系数R2均大于0.90,胸径均方根误差RMSE均值为1.11,树高为1.05。胸径和树高估测差异主要与天然林与人工林的林分密度和树干形状有关,在林分密度较大的天然林中,导致小树的树冠被大树树枝部分遮挡,其胸径值被高估,大树高度被低估则是由于小树及其树枝的遮挡未能获得大树顶端充分的点云数据,这一结论与陈世林[25]基于激光雷达单木参数估测结论一致;由于单木树干不成标准圆形或者呈现畸形,导致拟合胸径的结果误差较大,与白少博[26]所得结论相仿。本研究胸径、树高和冠幅面积信息估测结果与黄旭等[27]基于背包式激光雷达估测落叶松单木因子信息精度相符合,且高于金忠明等[28]基于无人机遥感影像采用深度卷积神经网络U-Net和标记控制分水岭算法估测天山云杉单木树冠面积和冠幅的精度,证明了使用背包激光雷达估测天山云杉林单木因子信息具有较高的可靠性和可行性,能够满足林下三维参数高精度无损快速采集需求。但是,受限于本研究仅在地面开展了背包雷达数据采集,林木树冠部分扫描并不完全,与胸径和树高提取精度相比,单木冠层信息估测精度略低。
基于背包式激光雷达估测单木胸径、树高、冠幅面积信息,可以极大减少人工调查的工作量,提高单木因子信息估测效率。但由于背包式激光雷达测量手段尚处于蓬勃兴起阶段,随着新一代信息技术的飞速发展,背包式激光雷应用研究将会呈现如下趋势:
1)与天基、空基和地基激光雷达数据多尺度融合。近年来,研究人员对单木尺度树木冠层构型精细化处理要求越来越高,但由于背包式激光雷达设备不能获取树冠顶层完整的点云数据,尤其是对于高郁闭度林分条件下的单木冠幅和树高等因子估测的局限性较明显,因此,可与机载激光雷达[29-30]、地基激光雷达[31]等多源数据进行多尺度联合监测,获取森林单木全息立体信息,有利于进一步提升估测精度。
2)与被动式光学遥感数据多源融合。激光雷达传感器在获取森林关键参数的时空分布上有一定局限性,而被动光学遥感在获取森林生物物理参数的光谱信息方面具有独特优势,因此,将光学影像[32]、多光谱[33]、高光谱[34]和激光雷达技术相融合已成为激光雷达硬件发展的方向之一。
3)深度学习融合的激光雷达单木因子提取算法研究有待增强。随着深度学习方法在图像识别与分类领域的深入研究与应用,基于深度学习方法融合三维激光雷达[35]的点云数据进行单木识别并获取单木因子信息,将极大提高识别精度及其效率。
