基于电控空气悬架的车辆ACC系统姿态控制研究
2021-06-04徐柱曹占勇
徐柱,曹占勇
(1.贵阳职业技术学院,贵州 贵阳 550081;2.法国鲁昂国立应用科学学院,法国 里昂 76000)
1 引言
随着先进驾驶辅助技术的发展,ACC系统逐渐成熟并被广泛应用在普通家用车[1]。此外,空气悬架在中高级车型中配备来提高驾乘舒适性[2]。然而 ACC系统一旦设计完成装配,其工作时的车辆纵向加速度只能算法所决定,当汽车急加速或者制动时,为保持跟车性,ACC系统会以较大的加速度跟随前车。由于瞬间产生较大的纵向载荷转移,车辆将出现“低头”或“抬头”现象,影响驾乘舒适性以及车辆操纵稳定性。而电控空气悬架可通过调节空气弹簧内部气体压力实现悬架力的主动调节。因此,开展 ACC系统巡航工况下电控空气悬架实现车身姿态的主动控制,可提高车辆平顺性,具有广泛应用前景。
因此,本文分析并建立了与实际相符的电控空气悬架的机理模型,通过设计滑模控制器决策所需附加俯仰力矩,并对力矩进行分配,同时采用逻辑控制策略对电磁阀开度进行调节。通过在ACC巡航工况急加和制动工况进行仿真分析,对模型及算法有效性进行了验证。
2 电控空气悬架系统及整车建模
为实现电控空气悬架系统车身姿态的控制,需建立空气弹簧及其充放气过程的机理模型和整车动力学模型。通过控制开关电磁阀的开闭来调节充入和放出空气弹簧的空气质量,使得空气弹簧内的气压和体积发生改变,进而调节空气悬架提供的附加力,实现车身姿态的稳态调节控制。
2.1 电控空气悬架系统机理模型
电控空气悬架系统的简化结构示意图如图1所示,该系统主要包括储气罐、空气压缩机、管路、电磁阀组、电控单元、减振器和空气弹簧组成[3]。
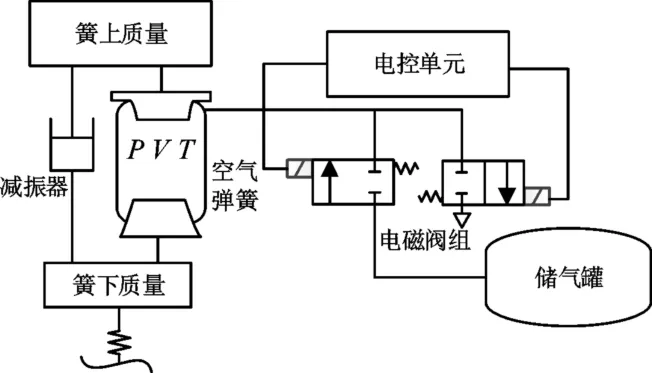
图1 电控空气悬架系统
空气弹簧工作过程中,其内部气体处于多变状态,由理想气体的状态方程有:

式中,P0为静态状态时空气弹簧内部的绝对压力,V0为静止状态时空气弹簧的有效容积,Pe为任意时刻空气弹簧内部的相对压力,Ve为任意时刻空气弹簧的有效容积,κ为气体多变指数,通常取为1.33,Pa为标准大气压。
空气弹簧运动过程中,其有效承载面积及容积均为变量,对于膜式空气弹簧,近似有如下关系:

式中,A0为静止时空气弹簧的有效承载面积,Ae为任意时刻空气弹簧的有效承载面积,zs和zu分别为簧上和簧下质量位移,α为空气弹簧有效容积变化率,β为空气弹簧有效承载面积变化率。由力和压强之间的关系可得到空气弹簧产生的主动力Fas为:

空气弹簧的充放气属于变质量充放气过程,由热力学第一定律推导得到重过期过程的机理模型为:

式中qin和qout分别为流入和流出空气弹簧的空气流量。管路在充放气时同样可视作变质量充放气系统,但其体积在充放气过程中保持不变,由式(4)可推导出管路的动态机理模型为:

式中,Pp为管路内气体压力,p为管路体积,qin_p和qout_p分别为流入和流出管道的气体质量流量。气体流经开关电磁阀所形成的气体质量流量主要受到上下游气压及其机构参数的影响,其机理模型可抽象为一个等效节流小孔来计算:
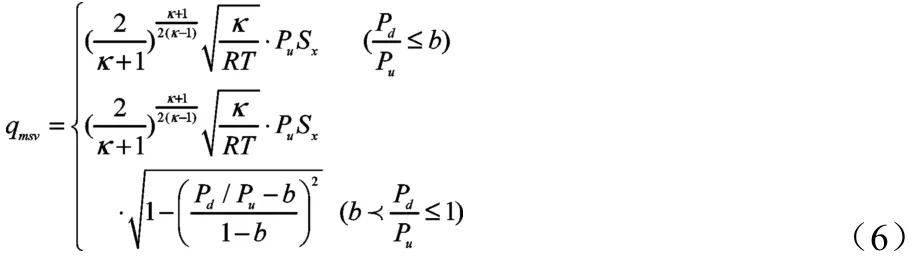
式中,Sx—为电磁阀等效面积,b为临界压力比,其值通常为0.528,Pu为电磁阀上游气压,Pd为电磁阀下游气压。
2.2 整车动力学模型
为研究巡航状态下车辆运动规律,加入电控空气悬架系统建立了整车7自由度动力学模型,如图2所示,包括四个簧下质量的垂向运动,以及簧载车身的垂向、侧向以及俯仰运动。
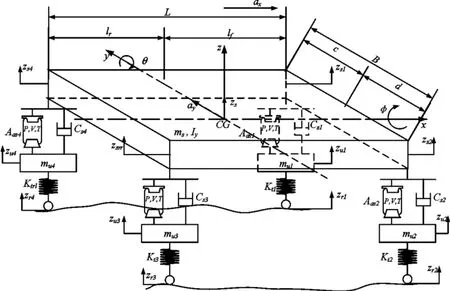
图2 整车动力学模型示意图
由牛顿第二定理可得车身簧载质量的运动为:
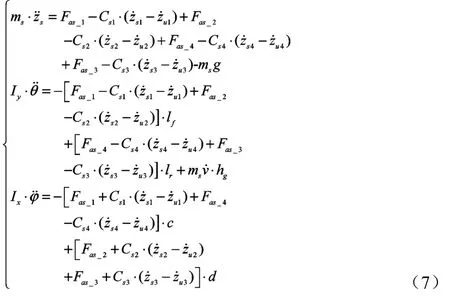
式中,zs为车身质心处的垂向位移,θ和φ分别为车身俯仰角和车身侧倾角,ms、Ix、Iy分别为车身质量、车身俯仰转动惯量和车身侧倾转动惯量,Fas_i(i=1,2,3,4)为四个空气弹簧的垂向作用力,Cs_i(i=1,2,3,4)为四个减振器的阻尼系数,zs_i(i=1,2,3,4)为车身四角处的垂向位移,zu_i(i=1,2,3,4)为四角处非簧载质量的垂向位移,lf和lr为质心到前后轴的水平距离,c、d分别为左右轮距值的一半。同理可得簧下质量的运动为:
式中,Kt(i=1,2,3,4)为四个车轮的刚度系数,由集合关系近似有簧载质量垂向位移和簧下质量垂向位移关系:

2.3 道路激励模型
车辆巡航过程中车身俯仰姿态不仅与纵向加速时载荷转移有关,还与道路的输入激励有关[4]。前轮所受路面激励为:

式中,u0为车辆纵向行驶车速,nc为路面空间下截止频率,n0为参考空间频率,Gq(n0):参考空间频率 n0下的路面功率谱密度值,W1(t)为白噪声。以式(10)为前轴左右轮输入,则后轴车轮的输入与其相差一个时间延迟,可定义为:

3 姿态控制及控制分配策略设计
ACC系统工作时,车辆根据雷达系统所采集的与前方车辆的间距以及速度信息,通过预设算法决策出所需纵向加速度。当前车急加速或制动时引起 ACC车辆产生同步跟随的加速度信号,导致车姿俯仰失衡。由分析知,可通过设计控制算法计算得出所需附加俯仰力矩,在前后轴进行力的分配,调节空气弹簧内部空气质量流量,进而改变空气弹簧内部有效压力,使得车辆空气悬架系统产生相应的抗俯仰力矩,实现稳定的车身姿态。
3.1 滑模姿态力矩控制
滑模控制属于一种变结构控制方法,被广泛应用于车辆的各种控制系统,如主动悬架控制、主动转向控制以及差动制动控制等[5]。
根据公式(7)的车辆模型,采用无抖动滑模控制,利用电控空气悬架系统作为车身姿态的执行设备。系统输入为附加俯仰力矩Map,输出为车辆俯仰角θ。因此,滑模面可定义为:
同时选择滑模的比例趋近率作为趋近条件,即:

联立式(13)和(14)可得姿态控制的附加俯仰力矩为:

为消除抖振,利用饱和函数替换原来的符号函数sat(s/b)替换原有的符号函数sgn(s),即:

式中,系数b表示滑模面的边界厚度。
3.2 悬架垂向力分配及电磁阀逻辑控制
由于车辆悬架系统不能直接施加附加俯仰力矩,所以需对力矩在前后轴的附加垂向力进行分配,并通过控制前后轴电磁阀PWM波信号来实现附加俯仰力矩的跟随作用。根据前后轴载荷分配可得前后轴悬架附加力为:
式中,l为车辆轴距,Pe_i和Pe_j分别为前后轴左右空气弹簧内部有效压力,Aas_i和Aas_j分别为前后轴左右空气弹簧的有效面积。由充放气热力学过程可得所需理想的冲入或放出空气质量为:

式中,P0i和 P0j分别为前后轴左右空气弹簧初始压力,V0i和V0j分别为前后轴左右空气弹簧的初始体积。由于附加俯仰力矩是一个时变变量,使得对电磁阀组PWM波的控制也时瞬态的。因此,由实时电磁阀所能提供的空气质量流量qsv和理想空气质量mdes可得电磁阀的占空比信号为:

因此,通过占空比信号在一个周期内的开关信号控制电磁阀的动作,最终流入空气弹簧的有效空气质量为:

4 ACC工况仿真及分析
为了验证电控空气悬架模型及其控制算法的有效性,模拟车辆在 ACC工况下遇到前车急加或急减速行驶,本车为了保持良好的跟车性以同等加速度跟随行驶工况下进行仿真。车辆及电控空气悬架仿真参数见表1。

表1 车辆主要参数
如图3所示,自车从远处接近前车,并最终紧急制动停车。ACC车辆以80km/h的初始速度在B级路面巡航行驶,先加速从远处接近前车,之后紧急制动至减速度为-5.7m/s2,并最终停车。
由图4所示,紧急制动工况下,电控空气悬架由于系统时滞和进气量较少,初段作用效果不是很明显,但之后系统能保证车身姿态俯仰角在期望值0附近波动,且幅值较空气悬架有所降低。由图5和6可知,紧急制动时车身的垂向和俯仰方向的振动均得到有效抑制,显著改善了车辆运行时的平顺性和舒适性。由表2进一步分析知,垂向和俯仰方向的加速度均方值分别降低了14.89%和17.60%。
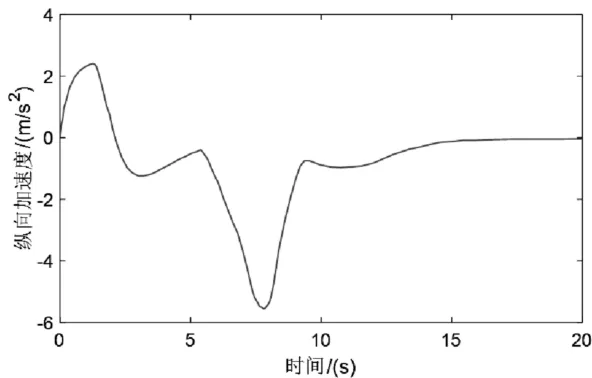
图3 ACC系统制动工况加速度
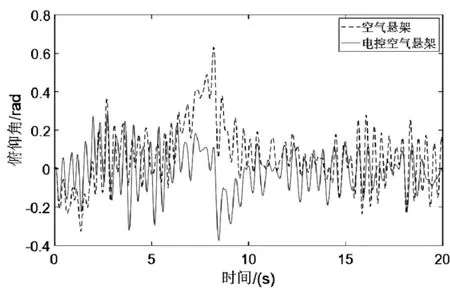
图4 车身俯仰角
如图7所示为车辆前轴悬架PWM波控制信号,紧急制动时,通过前轴充气,后轴放气来实现滑模控制所需附加俯仰力矩的跟随作用。

表2 制动工况车身姿态指标加速度均方值
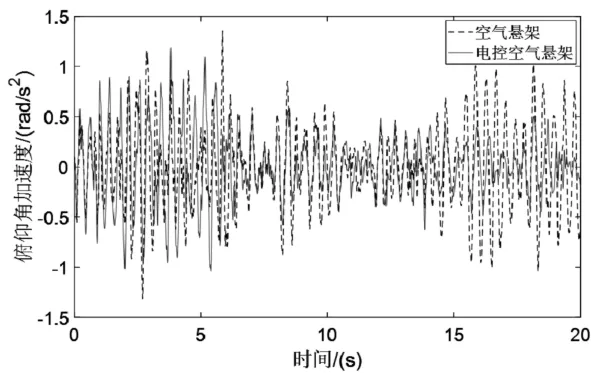
图5 俯仰角加速度
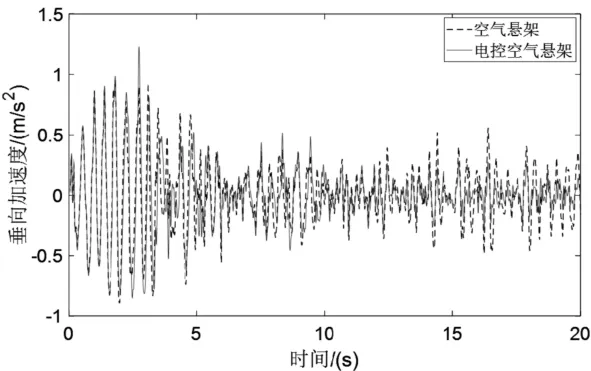
图6 车身垂向加速度
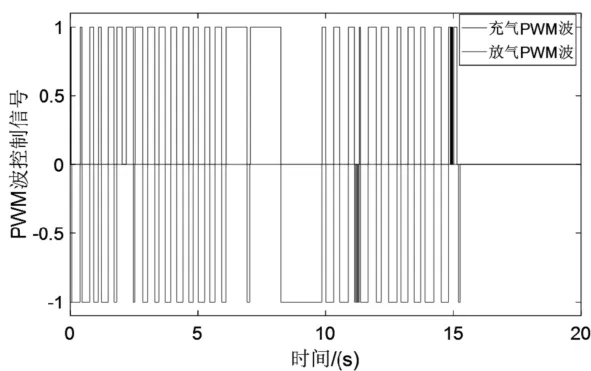
图7 前轴电磁阀PWM波脉冲信号
5 结论
本文应用滑模控制理论和开关电磁阀逻辑控制策略设计了整车电控空气悬架在 ACC系统巡航工况下的车身俯仰姿态控制器,通过电磁阀充放气实现期望附加俯仰力矩的跟随作用。仿真结果表明,提出的基于电控空气悬架的车辆在ACC系统巡航急加速和制动工况下均能够有效地改善车辆俯仰姿态,车姿加速度均方值优化达到10%以上,同时将车身振动抑制在合适范围内。
