混动双行星排传动系统的能量管理*
2021-06-04卓文得孙贵斌李英周慎左文洋甘健超
卓文得,孙贵斌,2,李英,周慎,左文洋,甘健超
(1.厦门理工学院 机械与汽车工程学院,福建 厦门 361024;2.福建省新能源与安全技术研究院,福建 厦门 361024)
前言
随着全球环境问题和能源危机的日益突出,混合动力汽车作为一种新能源汽车而备受关注。动力耦合机构是混合动力汽车动力耦合的关键部件,目前应用最为广泛的是行星齿轮动力耦合机构[1],其中,双行星排传动机构有效整合了串联结构和并联结构的优点,同时克服了单排和三排传动机构的不足,使传动系统结构更为紧凑,更具实用性[2-3]。传动系统的能量分配管理直接影响到车辆的动力性和燃油经济性,是混合动力汽车控制中重要的一部分。
赵博闻和马东兵[4]采用逻辑门限值能量分配控制策略,在 Matlab环境下对一款新型双行星排动力耦合系统进行研究分析,结果表明逻辑门限值能量分配控制策略可以有效提高混合动力汽车的燃油经济性。 戴宇童和马玮廷[5]针对某款星排传动机构采用瞬时最优的能量管理策略,寻找全车速下各高效工作点,研究表明瞬时最优的能量管理策略能够减少燃油消耗。Gao等[6]提出了一种驱动控制策略,该控制策略基于发动机最小制动比油耗曲线,针对不同的行驶工况,根据车辆电池荷电状态(SOC)、车辆需求功率和车辆需求速度确定各种工作模式的能量管理策略,试验结果表明,该控制策略对于发动机的控制有良好的效果,能有效地提高整车的燃油经济性。Huang等[7]将逻辑门限法和瞬时优化算法相结合,提出一种新型能量管理策略,在中国典型城市工况下利用Matlab/Simulink进行整车燃油经济性仿真,结果表明,该能量管理策略能够有效降低车辆的燃油消耗,并且能够使电池的SOC值保持在较优的工作范围。
本文基于一款新型双行星排传动系统,通过杠杆法对传动系统进行分析,根据系统的传动特性采用多种策略相结合的能量管理方式,达到提高混合动力汽车燃油经济性的目的。
1 系统分析
新型双行星排传动系统结构如图1所示,该传动系统是一款双电机(EM1和EM2)、双离合(C0和C1)、复合式星排深度混合的紧凑型动力系统。系统拥有3个自由度控制模式,结合锁止机构B1为传动系统的控制提供更大的自由度,使得系统具有多样化的工作模式。
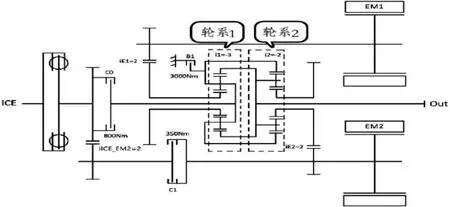
图1 双行星排混合动力系统结构
传动系统具备多种纯电动及混合动力工作模式,改变离合器C0、C1和制动器B1的结合状态可以改变系统的传动方式,得到不同的工作模式。通过改变3个元件的结合状态可得到8种不同的传动方案,再结合发动机、电机的工作状态,可提炼出10种系统可实现的工作模式,不同工作模式及各部件状态见表1。
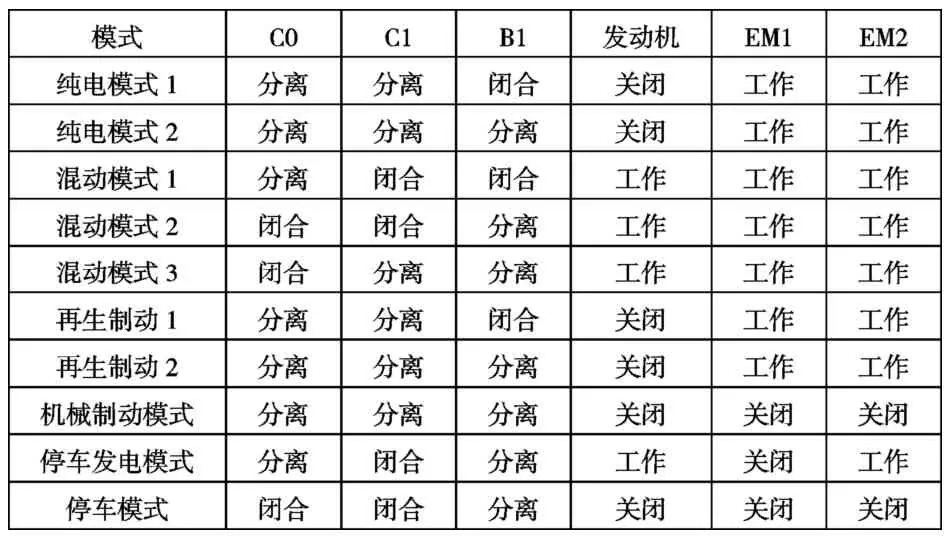
表1 系统工作模式
2 能量分配
通过分析传动系统各工作模式的传动特性,基于提高燃油经济性的原则对传动系统做能量管理研究。该传动系统的主要目标车辆为城市客车,本次研究所选车型的主要技术特征参数见表2。
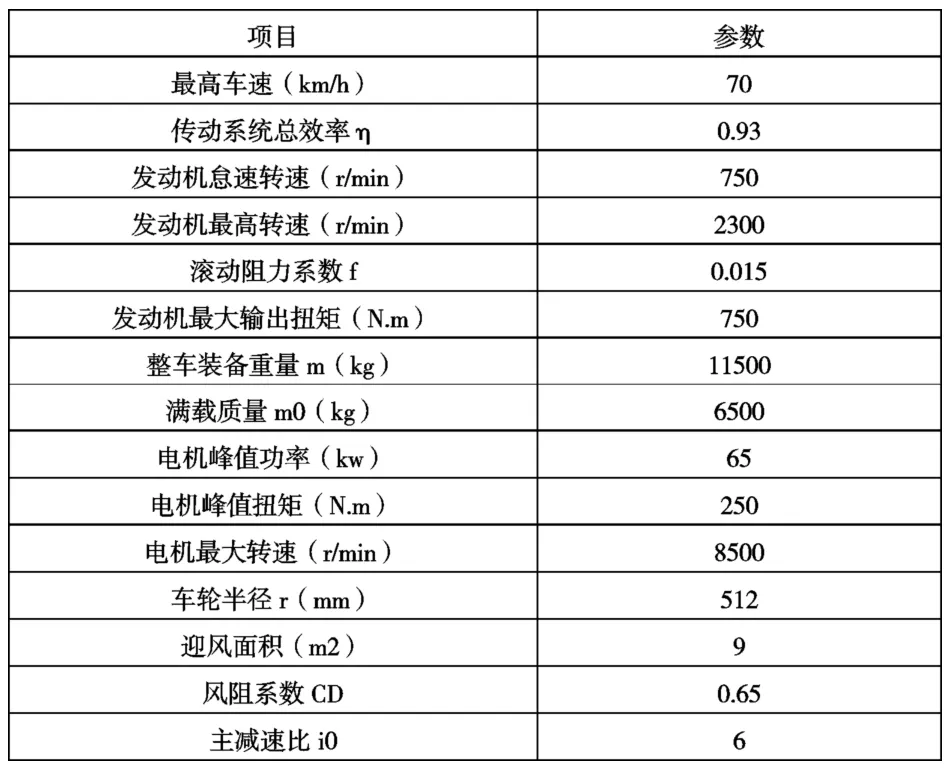
表2 车辆主要技术特征参数
2.1 纯电模式1能量管理
纯电工作模式1状态下,制动器B1闭合,离合器C0和C1分离,等效杠杆关系如图2。
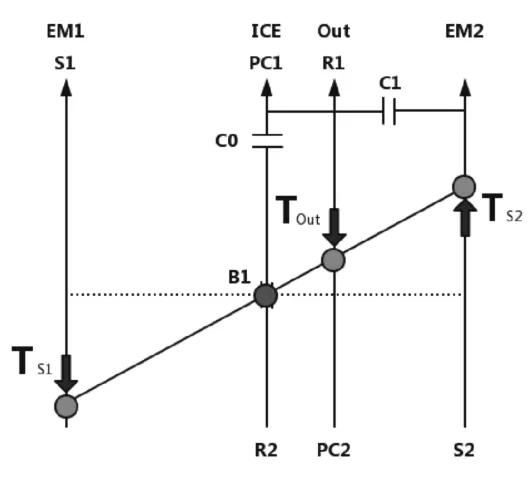
图2 纯电模式1—等效杠杆图
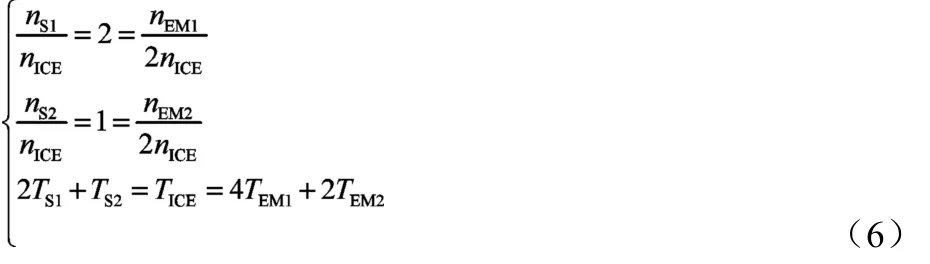
设nS1为轮系1太阳轮的转速,nS2为轮系2太阳轮的转速,nout为系统的输出转速,nEM1为电机EM1的输出转速,nEM2为电机EM2的输出转速,TS1为轮系1太阳轮的输入扭矩,TS2为轮系2太阳轮的输入扭矩,TEM1为电机EM1的输出扭矩,TEM2为电机EM2的输出扭矩,Tout为系统的输出扭矩,则存在以下关系:
该模式下系统输出的转速与电机单体输出转速存在固定比例,电机EM1和电机EM2的输出转速由需求转速确定,系统输出扭矩由电机EM1和电机EM2联合提供,与电机单体的输出扭矩不存在固定比例,故电机的输出扭矩是该模式的主要控制变量。由式(1)可知,在需求扭矩确定的情况下,当其中一个电机的输出扭矩确定,则另一个电机的输出扭矩被动确定,即该工作模式下的控制变量只有一个。在已知电机工作特性的前提下,采用静态逻辑门限能量管理策略将两电机控制在综合效率最优的工作点上,能够最大程度上提高能量的利用率。
基于Matlab平台上,对满足该工作模式的所有工况求两电机综合工作效率最优的工作点,结果如图3、图4。从图中可知,随着需求扭矩的增加,电机EM1和电机EM2的输出扭矩和呈上升趋势,符合该模式的传动特性逻辑。此外,由于电机的工作特性,在需求扭矩较小时,主要由电机 EM1单独提供输出,电机EM2的输出功率基本为0。从图2可知,两电机到输出轴的传动比相同,同一工况下两电机的输出可以相互对换。

图3 纯电模式1—电机1输出扭矩
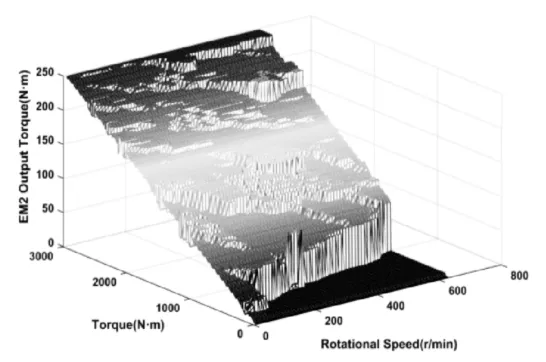
图4 纯电模式1—电机2输出扭矩
2.2 纯电模式2能量管理
在纯电模式2状态下,制动器B1处于分离状态,离合器C0和C1处于分离状态,传动系统的等效杠杆关系如图5。
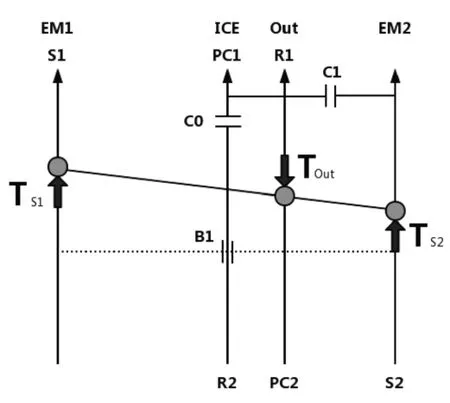
图5 纯电模式2—等效杠杆图
从等效杠杆图可得到以下关系:
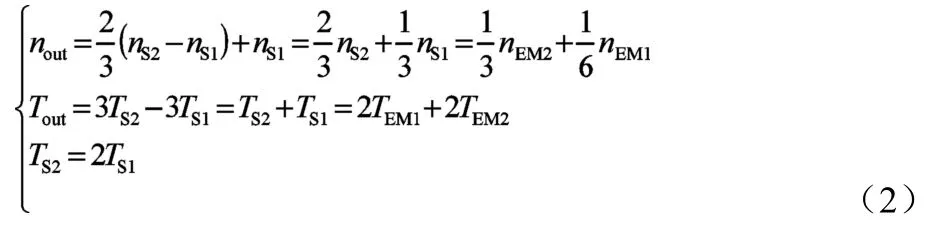
由图5可知,受到杠杆平衡的限制,系统的输出扭矩与电机EM1和电机EM2的输出扭矩存在固定传动比,电机的输出扭矩取决于需求扭矩。系统的输出转速由电机 EM1和EM2按照一定关系共同驱动,可以从0到最高转速实现无级变速,与电机单体的输出转速不存在固定传动比例,故该模式下的主要控制变量是电机输出转速。同纯电模式1类似,在需求转速确定的情况下,系统的控制变量只有一个,同样采用静态逻辑门限能量管理策略将两电机控制在综合效率最优的工作点上。
对能够满足该工作模式的所有工况求电机 EM1和电机EM2的最优工作转速,结果如图6和图7。从图中可知,电机 EM1的工作转速范围大,落在-7000r/min到 7000r/min之间,随着需求转速的增加,电机 EM1的输出转速从-7000r/min开始下降,再上升到7000r/min。相较于电机EM1,电机 EM2的工作转速范围较小,没有明显地上升或下降趋势,主要集中在3000r/min-5000r/min的高效工作区域。
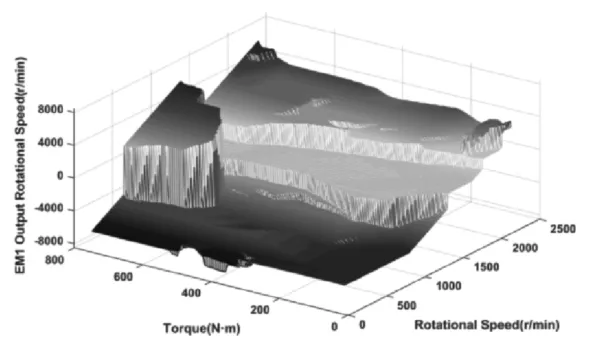
图6 纯电模式—电机1输出转速图
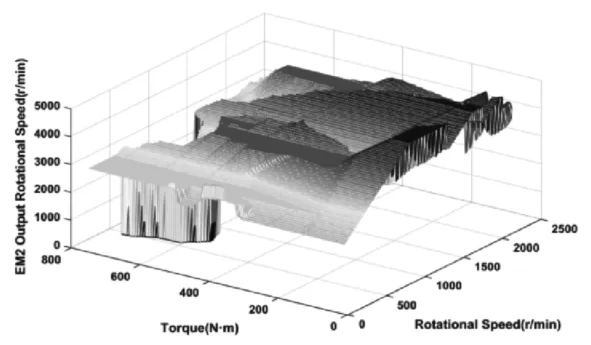
图7 纯电模式2—电机2输出转速图
2.3 混动模式1能量管理
当传动系统处于该工作模式下时,制动器 B1闭合,离合器C0分离,离合器C1闭合,发动机参与驱动车辆,电机EM1和电机EM2选择性参与驱动,系统等效杠杆关系如图8所示。
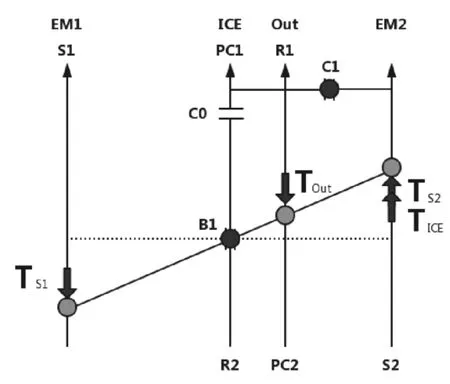
图8 混动模式1—等效杠杆图
由等效杠杆图可得:
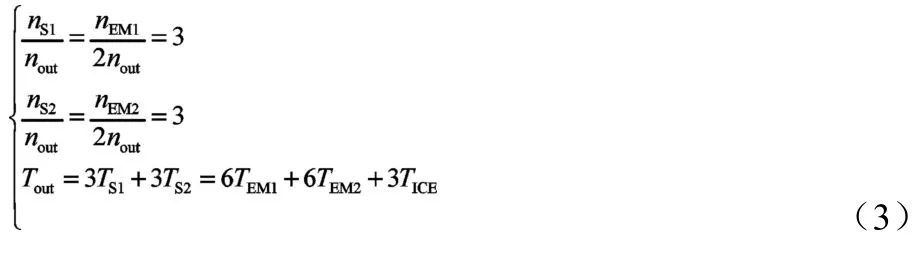
该工作模式下发动机和电机的输出转速与系统输出转速存在固定传动比,发动机与电机的输出转速由需求转速确定。系统输出扭矩由发动机和电机联合提供,与发动机或电机单体的输出扭矩不存在固定传动比,故该模式下主要控制变量为发动机和电机的输出扭矩。基于节能减排的考虑,对发动机参与工作的模式,将发动机作为优先控制的对象。在发动机输出转速确定的情况下,采用最优工作曲线策略将发动机控制在对应工作转速下的最佳工作状态[8],发动机最优工作曲线如图9所示,红色曲线为发动机在不同工作转速下的最优工作扭矩。确定发动机的输出扭矩后,两电机的控制与纯电模式1类似,采用静态逻辑门限能量管理策略控制两电机的输出扭矩。
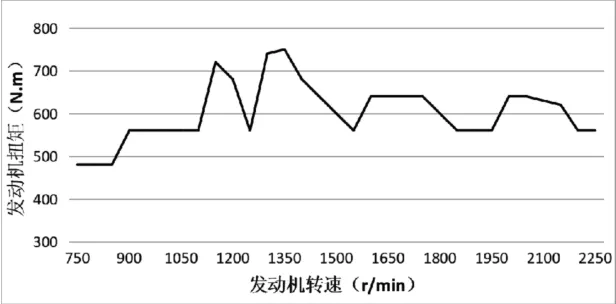
图9 发动机最优工作曲线
2.4 混动模式2能量管理
该模式下制动器B1分离,离合器C0、C1闭合,发动机与电机EM1、电机EM2联合驱动车辆,等效杠杆关系如图10所示。
该模式下发动机的输出转速到输出轴的传动比为 1,电机的输出转速始终是发动机输出转速的2倍,分析等效杠杆图可得:

由图10可知,该模式与混动模式1相同,系统的输出转速与发动机和电机的输出转速存在固定传动比,系统的输出扭矩由发动机和电机联合提供,与发动机或电机单体的输出扭矩不存在固定传动比。故该模式的能量管理同混动模式 1一样,对于发动机的控制,采用最优工作曲线策略,对于电机输出扭矩的控制,采用静态逻辑门限的能量管理策略。由式(4)可知,混动模式2主要用于中高速平路行驶工况,存在需求扭矩小于发动机最优工作扭矩的状况,因此在发动机输出功率富余且电池的SOC值低于充电上限时,将发动机的剩余功率转化为电能,存储在蓄电池中。
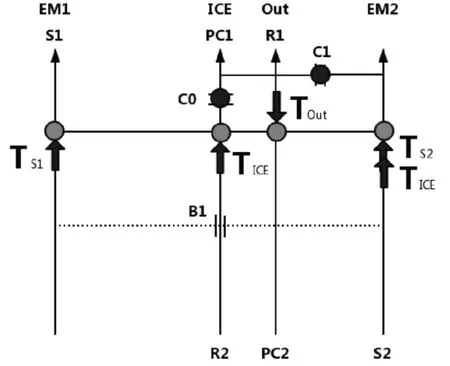
图10 混动模式2—等效杠杆图
2.5 混动模式3能量管理
混动模式3状态下制动器B1分离,离合器C0闭合,离合器C1分离,发动机的输出功率全部通过离合器C0输入到星排机构,系统等效杠杆关系如图11所示。
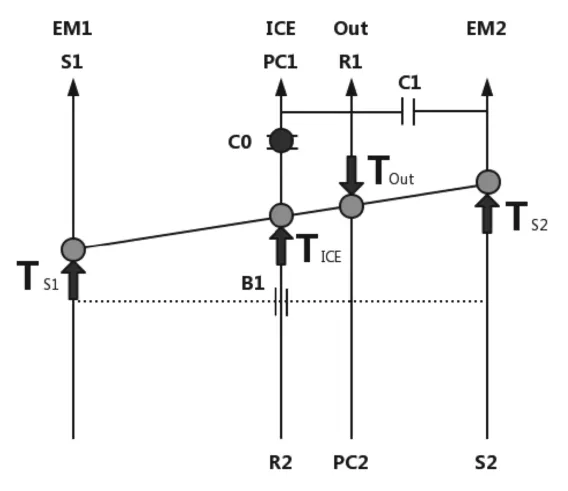
图11 混动模式3—等效杠杆图
该模式下发动机与电机采用功率分流的杠杆平衡方式驱动车辆,系统输出转速可以实现从0到最高转速之间连续变化。从等效杠杆图可以得:

该模式下系统输出的转速、扭矩与发动机或电机单体的输出转速、扭矩都不存在固定传动比,故发动机和两电机的输出转速、扭矩都是该模式下的控制变量。由式(5)可知,针对一些确定的工况点,发动机的输出转速和扭矩在一定区间内可任意调节,通过用恒定工作点能量管理策略将发动机控制在最优工作点上输出,能够最大程度降低发动机的油耗和排放[9]。将发动机的相关数据导入到Matlab中,求出发动机的最优工作点如图12。在发动机的输出转速、扭矩得到确定后,电机EM1和电机EM2的输出转速、扭矩由系统需求和发动机的实际输出共同确定。
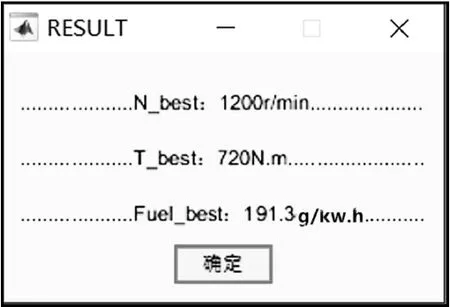
图12 发动机最优工作点
2.6 再生制动模式能量管理
再生制动模式能够在车辆减速时将部分动能通过电机转化为电能储存在蓄电池中,提高车辆的能源利用率。再生制动模式1状态下,制动器B1闭合,离合器C0和C1分离,等效杠杆关系如图 13。当再生制动模式 2状态下,制动器B1、离合器C0、C1都处于分离状态,等效杠杆关系如图14。由图13、14可知,两种再生制动模式的传动特性分别与两种纯电工作模式相似,只有能量流动方向不同。所以两种再生制动模式的能量管理方式可分别比照两种纯电工作模式,通过静态逻辑门限策略分别控制两电机的输出扭矩、转速。
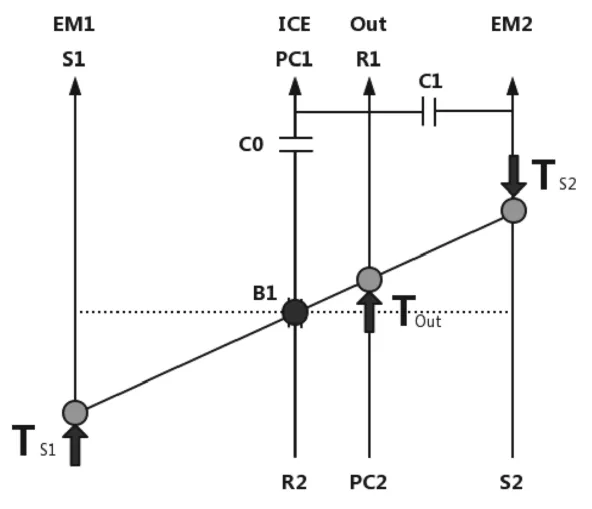
图13 再生制动模式1—等效杠杆图
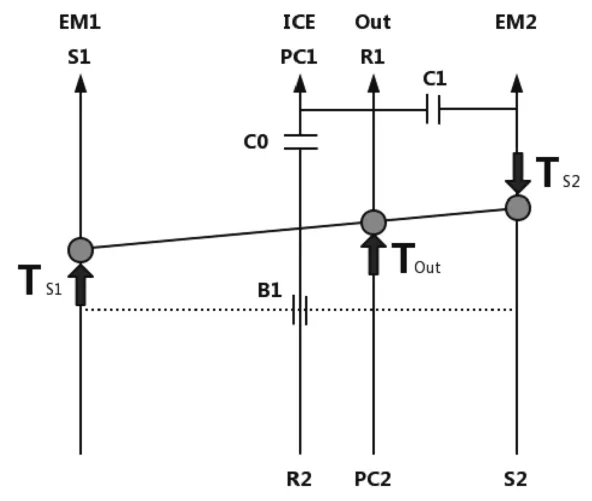
图14 再生制动模式2—等效杠杆图
2.7 停车发电工作模式能量管理
设置停车发电模式能够充分利用车辆静止的空余时间使用发动机对蓄电池的电量进行补充,保证电池的SOC值处于更合适的水平,对电池的寿命和车辆的排放都有积极的作用。该模式下,动器B1分离,离合器C0分离,离合器C1闭合,发动机和两电机同时参与工作,但系统输出转速、扭矩都为0,等效杠杆关系如图15所示。
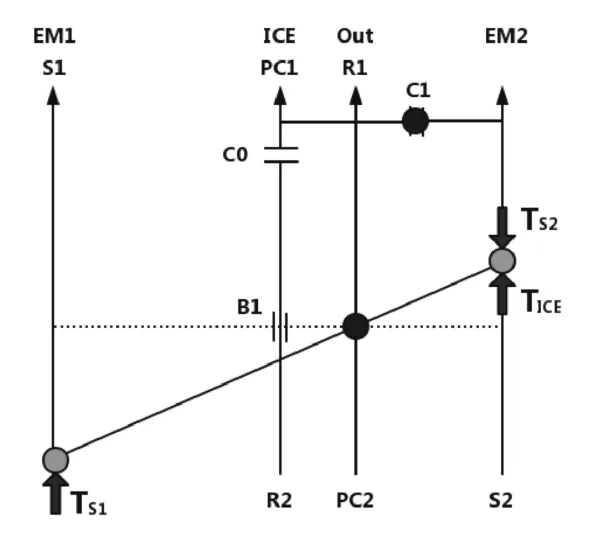
图15 停车发电模式—等效杠杆图
分析等效杠杆图可得:
该模式下系统内的能量由发动机流向电机,发动机输出转速与电机输出转速存在固定比例,发动机输出扭矩与电机输出扭矩不存在固定比例。由于该工作模式不受行驶工况影响,所以发动机的工作状态可以任意设定。基于节能减排的考虑,采用恒定工作点能量管理策略将发动机控制在最优工作点上,最大程度上降低发动机的油耗和排放。当发动机工作点得到确定后,两电机的输出转速被动确定,对于电机输出扭矩控制,通过静态逻辑门限的策略求两电机综合效率最优的工作点。将相关数据导入Matlab软件,编程求得发动机和电机的工作点如图16所示。
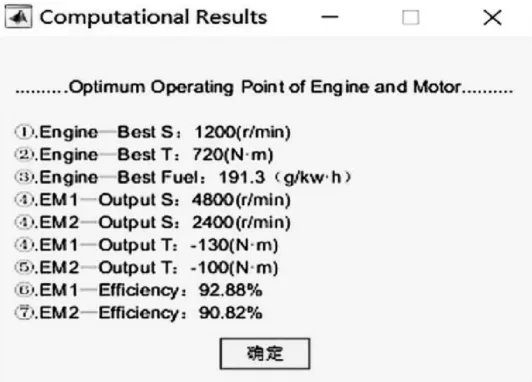
图16 停车发电模式—发动机和电机工作点
3 仿真建模与结果分析
本次整车建模采用前向仿真与后向仿真相结合的方式[10],根据研究结果和相关参数搭建整车仿真模型。选用工况
的百公里油耗作为评价燃油经济性的主要指标,车辆负载为满载质量的65%,此外,尽可能使电池电量在仿真起始点和仿真结束点保持一致,降低电池电量的对仿真结果的影响[11]。根据我国最新发布的中国汽车行驶工况标准 GB_T 38146.2-2019《中国汽车行驶工况 第2部分 重型商用车辆》对于混合动力重型商用车进行燃油经济性考核,考核工况为CHTC-B中国城市客车行驶工况。在不影响结果的前提下,为了便于研究,去除工况起步和结束时车速为0km/h的点[12],得到行驶工况如图17。
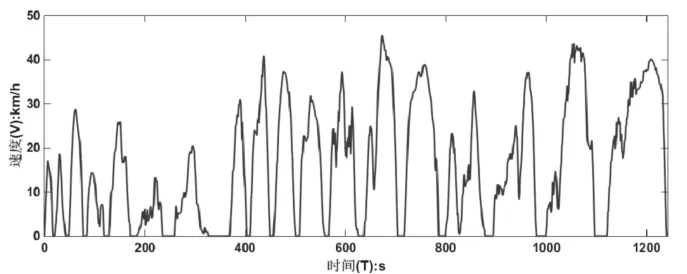
图17 行驶工况
根据标准运行仿真模型,图18为工况覆盖图。从图中可得,在误差允许的范围内,实际输出车速完全覆盖工况需求车速,这表明,对于混动双行星排传动系统的能量分配管理在动力性方面能够满足工况需求,仿真结果具备一定参考价值。

图18 工况覆盖图
图19为发动机实时燃油消耗率曲线图,从图中可得,在整个工况中,发动机的实时燃油消耗率大部分都低于200g/kwh,只有少数几个时刻接近200g/kwh,即在整个行驶工况中发动机的工作点基本落在最优工作区间内。仿真结果表明,本次能量分配管理对于发动机参与工作的工况采用优先控制发动机的效果显著,总体上能够有效地将发动机控制在较优的工作区域内,有利于提高整车燃油经济性。
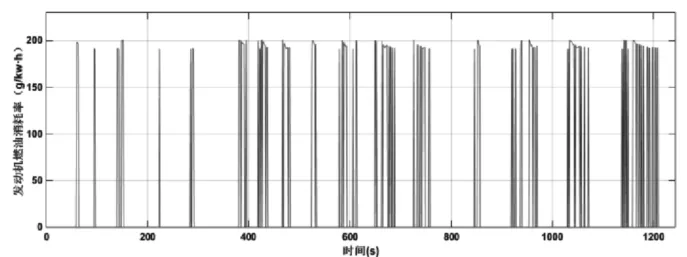
图19 发动机实时燃油消耗率
图20为电池实时SOC值曲线图。由图可得,在整个工况运行过程中,电池SOC值基本保持在49-52,表现比较稳定。电池SOC值波动幅度小,有利于电池的稳定工作和使用寿命的延长。此外,电池的SOC值在仿真起始点和仿真结束点保持一致,消除了电池电量对仿真结果的影响,使仿真更加精确。

图20 电池实时SOC值
通过求取累积油耗和累积行驶里程,计算出本次基于CHTC-B城市工况的百公里仿真油耗为15.11L,仿真结果如图21,对比GB 30510-2018《重型商用车辆燃料消耗量限值》中的限值 31L,该结果极大降低了燃油消耗量,车辆的燃油经济性得到显著提高。
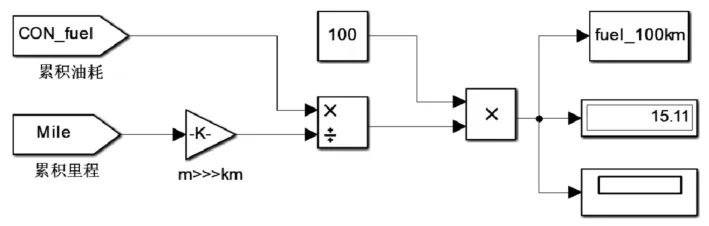
图21 百公里油耗
4 结语
本次研究从中国CHTC-B城市工况出发,对一款新型双行星排混合动力传动系统做能量管理研究。通过对传动系统工作模式进行特性分析,采用多种策略相结合的方式对系统做能量分配管理。根据研究结果和车辆参数基于Matlab/Simulink平台上搭建整车仿真模型,对传动系统做燃油经济性测试。测试结果表明,本次能量管理能够有效地将发动机和电机控制在较优的工作区域内,基于中国CHTC-B城市工况的百公里仿真油耗为15.11L,降低车辆燃油消耗的效果显著,极大提高了混动汽车的燃油经济性。
