一种车辆线控制动系统扭矩分配控制方法*
2022-10-27王晶
王 晶
(廊坊职业技术学院 机电工程系,河北 廊坊 065000)
当前形势下,发展新能源汽车,尤其是具有零污染、零排放的纯电动汽车,不仅对中国能源安全、环境保护具有重大意义,同时也是中国汽车领域实现转型升级、技术突破的重要方向。
当前国内外的纯电动汽车大多数采用电动真空泵为制动助力系统提供真空源,并通过液压制动系统最终实现制动功能,这种控制方案具有成熟度高的特点,但电动真空泵与真空罐作为附加机构安装于车辆的制动线路上,增加了制动系统的结构复杂度以及整体可靠性,同时也限制了系统性能的提高,针对这一问题,线控制动系统成为当前国内外纯电动汽车领域的研究热点。线控制动系统,制动踏板不再与制动缸直接相连,驾驶员的制动操作由传感器采集作为控制意图,完全或部分由液压执行器来完成制动操作,弥补了传统制动系统设计和原理所导致的不足,使制动控制得到最大的自由度。
纯电动汽车由电机驱动,在车辆制动工况下能够通过电机能量回收产生部分制动扭矩,同时为动力电池充电。在驾驶员执行制动操作时,能量回收与线控制动系统均会产生制动力矩,但基于线控制动系统的纯电动汽车制动过程中制动力矩的合理高效分配方法目前国内外均无成熟解决方案。
针对以上问题,本文提出了一种适用于纯电动车辆的线控制动系统扭矩分配控制方法。该方法首先根据制动踏板状态解析驾驶员的制动需求并获得需求制动扭矩,之后根据电池与电机状态计算电机最大制动功率,在此基础上分配电机系统与液压系统的制动扭矩。本文充分考虑到液压系统由于温度、部件机械特性等因素影响其输出制动力的稳定性与准确性问题,结合驱动电机动态响应速度快的特点,通过调节电机系统产生的制动扭矩对液压系统输出的制动力进行补偿,保证最终作用在车辆中的制动力矩与驾驶员需求保持一致。
1 线控液压制动系统构架
纯电动汽车线控液压制动系统构架如图1所示。其中,制动踏板系统将驾驶员的制动意图转换为电信号,并将该电信号处理后通过1发送给整车控制器;电池管理系统将此时动力电池的工作状态通过2发送给整车控制器,其中包括故障信息、电池允许最大充放电功率、电池SOC等;整车控制器在接收到以上信息后首先对制动信号进行解析并得到需求制动扭矩,在此基础上通过判断电池状态将需求制动扭矩分别通过3、4分配给驱动电机与液压制动单元,其中电机部分的需求扭矩通过能量回收实现;之后驱动电机与液压制动单元按照需求扭矩对车辆实施制动操作;最后车辆通过6向整车控制器反馈车速状态,整车控制器判断制动是否达到预期,若未达到预期则对扭矩分配进行调整,最终实现对车辆制动过程的控制。
图2为图1中所提到的液压制动单元,该系统在控制器接收到需求制动扭矩后,通过控制电机、液泵等系统实现制动液流入、流出制动轮缸,最终达到对制动扭矩的控制。
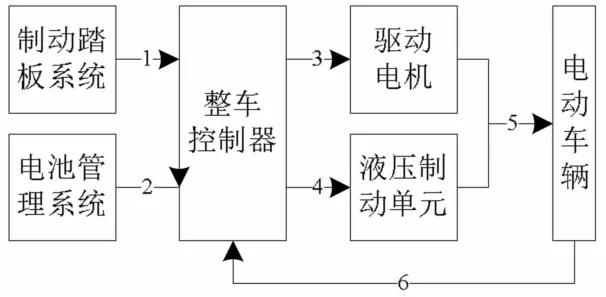
图1 线控液压制动系统构架
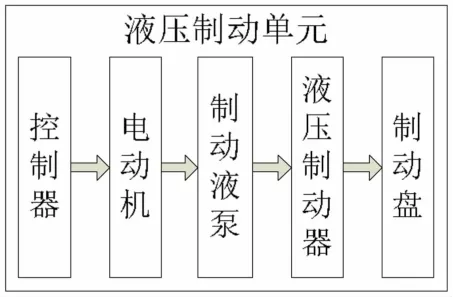
图2 液压制动单元构架
2 需求扭矩计算
对制动扭矩进行分配前首先需要获得需求扭矩,即整车控制器根据制动踏板信息分析驾驶员的制动意图,在此基础上得到需求制动扭矩并应用于后续控制,可以看出计算需求扭矩是进行制动扭矩分配的前提。
如图3所示,需求扭矩计算由两部分组成,分别为制动踏板信号处理与需求制动扭矩计算;其中整车控制器采集两路制动踏板信号,之后对其进行归一化处理、信号权重分配与死区滞环处理,最终得到踏板开度信息与故障信息;接下来需求制动扭矩计算部分结合以上信息与车辆状态通过查表得到需求扭矩值。
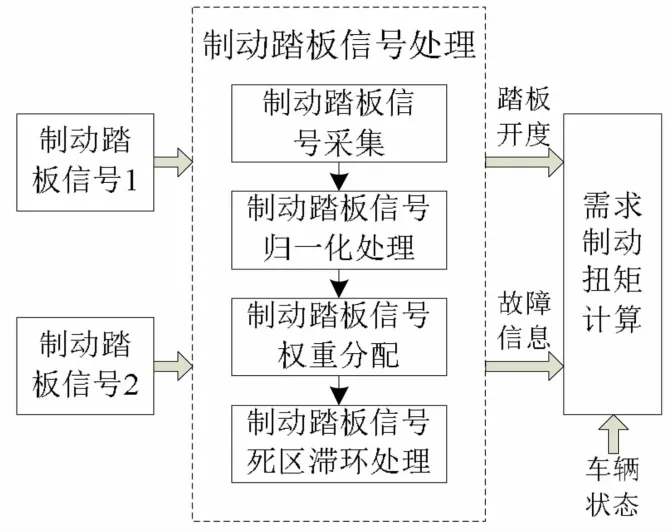
图3 需求制动扭矩计算方法
3 需求制动扭矩分配
在得到需求制动扭矩后需要对其进行分配,将需求扭矩分配给电机与液压制动单元,其中电机通过能量回收方式产生制动扭矩;扭矩分配的目的在于通过合理分配最终实现在最大限度回收制动能量的基础上保证车辆制动功能的可靠实现。电机最大能量回收扭矩计算如图4所示。
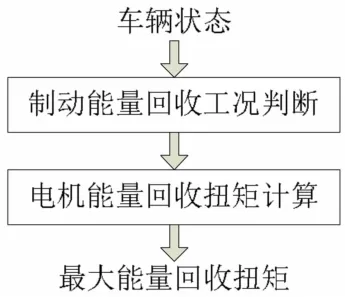
图4 电机最大能量回收扭矩计算
首先判断是否允许车辆进入制动能量回收工况,具体如下:①车辆挡位为前进挡;②整车无断高压及不可恢复零扭矩故障;③制动踏板被踩下,对应制动踏板开度大于阈值K;④加速踏板处于释放状态,对应加速踏板开度小于阈值K。
当以上4个条件全部得到满足时则认为车辆能够进入制动能量回收工况,即允许车辆进行能量回收,其中阈值K与K考虑了制动踏板与加速踏板机械死区特性对工况判断的潜在影响。
接下来进行电机最大能量回收扭矩计算,计算方法见式(1):
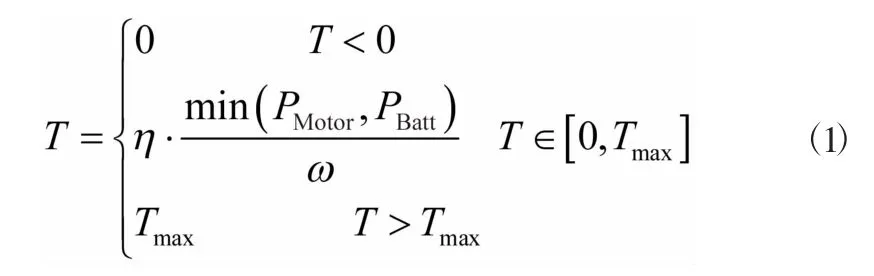
式中:T——电机最大能量回收扭矩;P——电机最大允许发电功率;P——电池最大允许充电功率;η——电机发电效率;ω——电机转速;T——电机最大允许发电扭矩,由式(1)可得到最大能量回收扭矩。为保护电机与动力电池,不应让其在极限值工作,为此引入扭矩余量。

式中:ΔT——扭矩余量;T——电机制动扭矩(发电扭矩)最大值。
由式(2)可以看出,ΔT的引入保证了电机与动力电池不工作在极限状态,因此对电机与电池起到了保护作用。
接下来对扭矩进行分配,定义T为电机分配得到的能量回收(发电)扭矩,计算方法如下:

式中:K——电机能量回收系数,该值小于1,其目的在于为后续的能量回收扭矩的微调提供调节余量。
定义T为液压制动单元分配得到的制动扭矩,计算方法如下:

式中:T——之前计算得到的需求制动扭矩。
由式(4)可以得到,当T≤T时,完全依靠电机的能量回收产生制动扭矩,当T>T时液压制动单元才开始介入,并产生制动扭矩。
式(3)与式(4)完成了制动扭矩的分配,考虑到液压控制单元在执行制动扭矩命令时的误差,或一些特殊工况下(下坡)在施加制动扭矩后车辆产生的减速度低于预期,针对这一情况,设计调整策略,通过调节电机的能量回收扭矩对其进行补偿,从而使车辆达到预期制动效果,具体方法如下。
如图5所示,系统输入为需求制动扭矩T,分配到液压制动单元与电机的制动扭矩分别为T与T;之后液压制动单元与电机按照扭矩命令分别对车辆产生制动扭矩;在制动扭矩的作用下车辆产生减加速度,利用制动扭矩估算模块估算作用在车辆上的制动扭矩,令估算扭矩为T;用需求制动扭矩T减去该值后得到偏差扭矩,该偏差扭矩经过偏差处理模块后得到补偿扭矩T;利用T对T进行补偿,最终保证车辆能够产生预期的减速度。
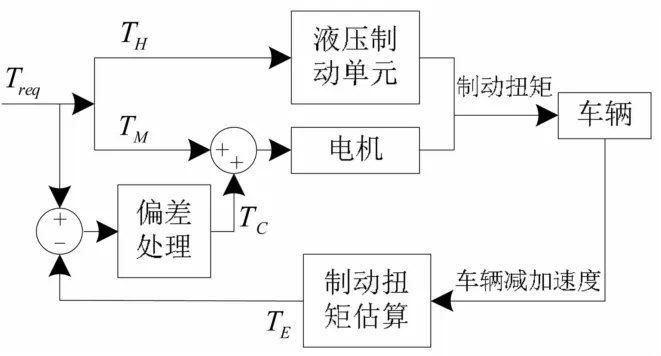
图5 电机最大能量回收扭矩计算
其中,制动扭矩估算通过查表实现,前期通过在无风、干燥平直的铺装路面下进行实车测试,通过实车标定得到不同车速及给定制动扭矩条件下车辆产生的减加速度值,将实验数据制成查询表,输入为车辆减加速度与车辆速度,输出为估算的制动扭矩;在实际制动过程中通过查询该表即可得到估算制动扭矩T。接下来介绍偏差处理模块,T减去T得到偏差扭矩,令该值为ΔT,则补偿扭矩T计算方法如下:

式(5)中,K为一大于0的正数,考虑到估算扭矩T与实际值必然会存在一定误差,因此当ΔT<K时认为偏差扭矩在合理范围内,不对其进行补偿;另外该方法中ΔT>0表示车辆产生的减速度低于预期,根据式(5),当满足ΔT≥K条件时T不为0,此时出于安全考虑对T进行补偿,而ΔT<0则表示车辆产生的减速度高于预期,此时认为该减速度与驾驶员制动意图不冲突,因此不对T进行补偿;当满足ΔT≥K条件时,通过查表法计算补偿扭矩T,具体为通过前期实车标定得到ΔT与补偿扭矩T的对应关系,在此基础上制成一维查询表,输入为ΔT,输出为T,在实际制动过程中通过查询该表即可得到补偿扭矩T,该扭矩不超过(1-K)·T。
4 仿真验证
搭建Matlab/Simulink仿真环境,对本文所提出的控制方法进行仿真验证。如图6所示。
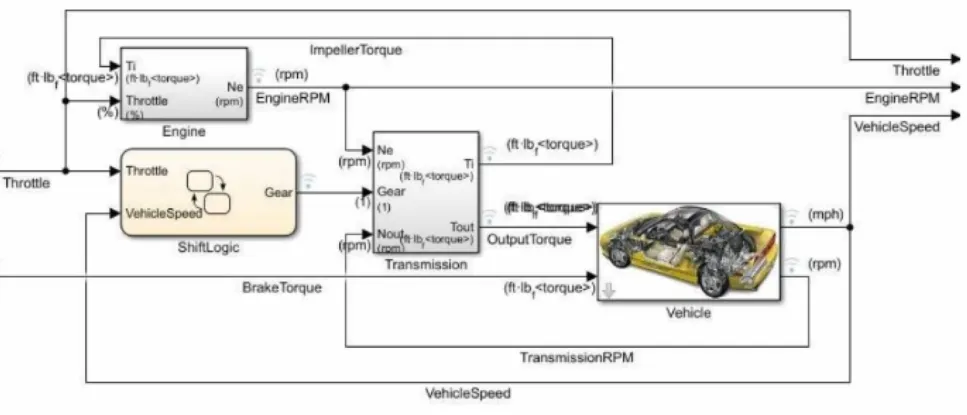
图6 Matlab/Simulink仿真环境搭建
仿真环境包括加速踏板、制动踏板、液压制动单元、驱动电机以及驾驶员模型等。其中驾驶员模型包括加速模型、制动模型。
图7为驾驶员加速模型的输出map,即驾驶员踩下加速踏板后的需求扭矩,其中X轴坐标为电机转速,Y轴坐标为加速踏板开度。可以看出,在驾驶员踩下加速踏板后,根据当前的电机转速便能够唯一地确定一个扭矩值,该扭矩便为驾驶员的需求加速扭矩。
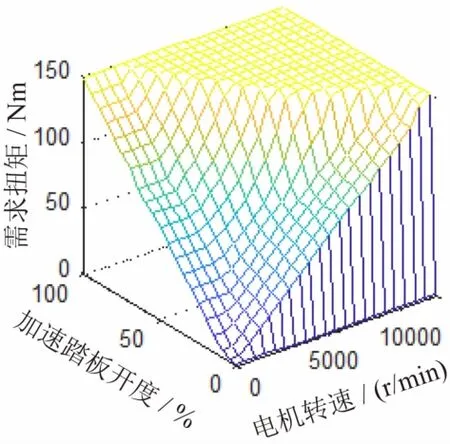
图7 驾驶员加速模型
图8为驾驶员制动模型的输出map,即驾驶员踩下制动踏板后的需求扭矩输出。可以看出,在驾驶员踩下制动踏板后,根据当前的电机转速便能够唯一地确定一个扭矩值,该扭矩便为驾驶员的需求制动扭矩。
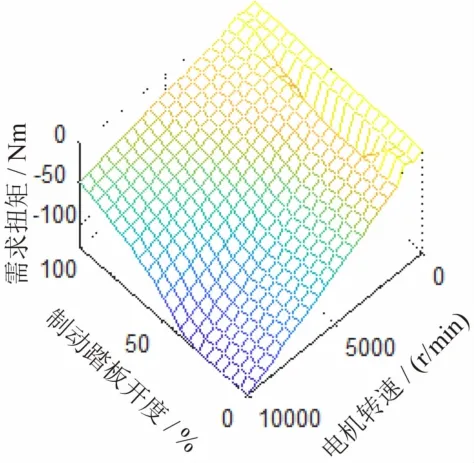
图8 驾驶员制动模型
以车辆常规制动工况为例进行实验仿真,对比单纯使用液压制动单元与本文所提出方法的制动效果。在时间等于4s时,驾驶员踩下制动踏板所产生的需求制动扭矩为-20Nm,根据图9可以看出,在小制动力工况下,单纯由液压机构产生制动扭矩时,由于执行机构死区、非线性等因素的影响,此时液压机构所产生的制动扭矩与实际需求偏差较大。
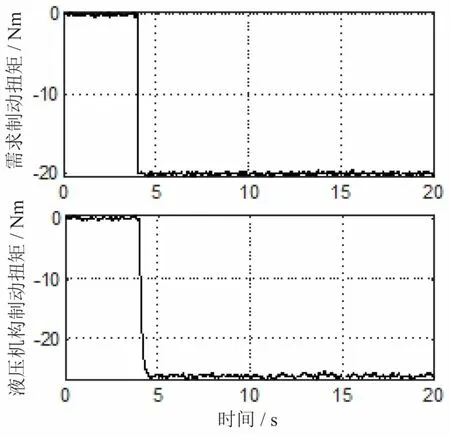
图9 液压机构产生制动扭矩图
图10为单纯液压制动控制与基于本文所提出扭矩分配控制过程中扭矩偏差的对比图。其中单纯由液压机构所产生的制动扭矩与实际需求扭矩偏差超过了6Nm,而采用本文提出的扭矩分配控制方法,借助于驱动电机响应速度快的特点,制动过程中车辆实际制动扭矩与需求扭矩偏差低于1Nm。
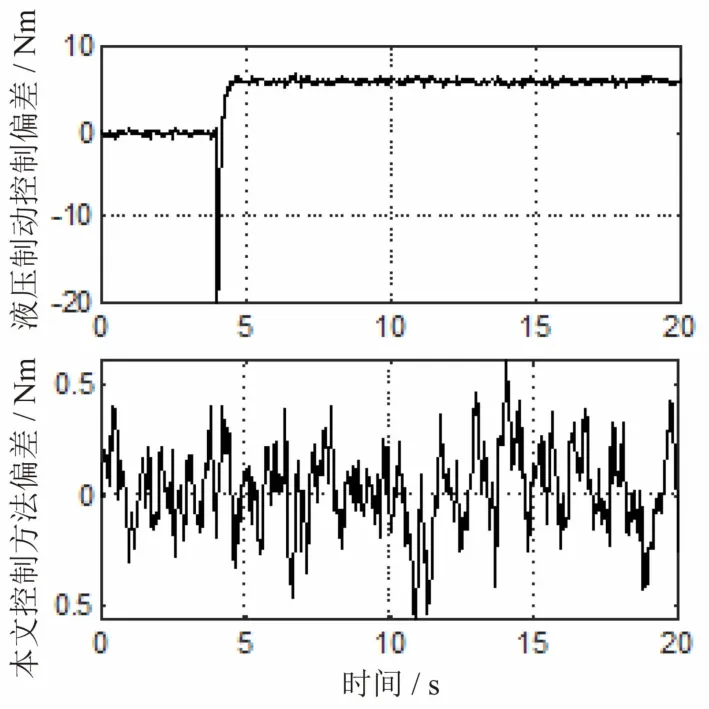
图10 液压制动控制与本文方法对比
5 结论
本文提供了一种适用于装备线控液压制动系统的纯电动汽车在制动过程中电机回收制动扭矩与液压制动扭矩的分配计算方法。该方法根据制动踏板的开度及变化状态解析驾驶员的制动需求并计算得到需求制动扭矩,之后根据电池与电机状态计算电机最大制动功率,在此基础上分配电机系统与液压系统的制动扭矩。考虑到液压系统由于温度、部件机械特性等因素影响其输出的制动力矩稳定性与准确性,该方法通过调节电机系统产生的制动扭矩对其进行补偿,保证最终作用在车辆中的制动力矩与驾驶员需求保持一致。最后通过搭建仿真环境对该控制方法的可行性及有效性进行了验证。
