高效橘子采摘装置的设计
2021-06-02林吉
林吉
(316000浙江省 舟山市 浙江海洋大学 船舶与机电工程学院)
0 引言
橘子是重要的经济作物之一,我国是橘子的主要原产国之一,橘子的采摘对果农的经济收入有很大的影响。我国柑橘果园普遍存在机械化程度低的问题,目前橘子的采摘大多是采用剪断果柄的方法,采摘多为人工采摘,效率较低,成本高[1-4]。为提高采摘效率,国内外学者一直在研制橘子采摘机械设备。橘子采摘机械设备必须考虑到橘子生长朝向具有各异性:其果柄有水平方向生长、竖直方向生长、倾斜方向生长等,如图1所示。橘子生长朝向各异性导致机械设备在采摘时,定位存在很大的困难。

图1 橘子生长各异性Fig.1 Anisotropic growth orientation of orange
另外,采摘时,不仅要保证果柄和橘子不会分离,而且还必须要控制剪下来的橘子果柄长度几乎为零,剪下来的果柄如果过长,容易剪到下一季节生长橘子的枝条,影响来年产率,更重要的是,收集时较长的果柄会损坏其他橘子。
1 采摘装置的结构与工作原理
1.1 结构组成
基于空间凸轮的橘子采摘装置整体结构如图2所示,其主要由环形剪切结构(1),环形联动机构(2),伸缩机构(3)组成。
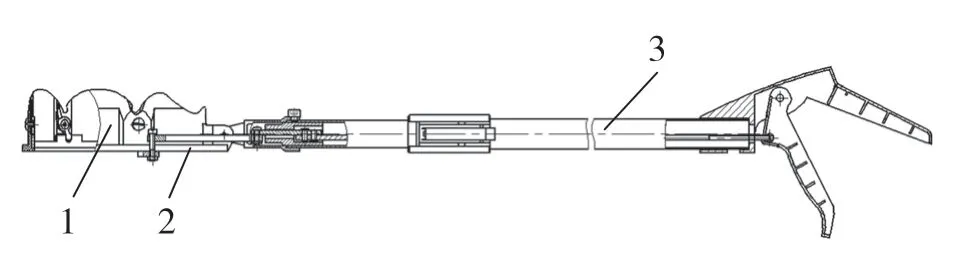
图2 基于空间凸轮的橘子采摘装置整体结构图Fig.2 Overall structure of orange picking device based on spatial cam
1.2 工作原理
使用本装置采摘橘子需3个步骤,使用者根据采摘习惯,调整环形剪切机构与中间杆的角度,用蝴蝶螺母锁紧,使两者不能发生相对转动。然后,在环形内圈上安排了5把剪刀,它们相互成约52°分布,以适应橘子的不同朝向。使用者将环形剪切机构套住橘子,在重力作用下,无论橘子哪个朝向,都会自动顺着内圈上的导向弧口滑入一个最合适剪切口。操作者按下手柄,手柄转动时,可使滑块沿直线方向移动,滑块移动时,可带动曲柄转动,即带动空间凸轮旋转,控制5把剪刀片完成剪切动作将橘子剪下。剪下的橘子经过半凹型果袋,经缓冲、翻转,最后低速滑入到果篮中。
2 关键部件设计
2.1 环形剪切机构的设计
外圈外壳考虑塑料件进行上下拔模加工,壁厚加至3 mm,为保证剪切效果,内外剪刀片材料依然采用蘸火处理过的白钢条。由于实际采摘时2个刀位几乎没有用上,设计为5个剪切位,各剪切位相互成约51.43°。在每个剪切位上设有剪切平面,确保剪刀片与内圈之间相互贴紧,无间隙,便于剪断橘柄。根据内径140 mm实际需要,将外圈内径扩大,考虑减重处理,材料选择为塑料件,这里选取PA-6,弹性模量2.62×109 N/m2,泊松比0.34,质量密度1 120 kg/m3,环形剪切机构如图3所示。为了检验是否达到要求,运用有限元软件进行有限元分析,分析结果如图4所示,满足使用要求。

图3 环形剪切机构Fig.3 Ring shear mechanism

图4 外圈有限元分析结果图Fig.4 Result chart of outer circle finite element analysis
2.2 环形联动机构的确定
环形联动机构主要由空间凸轮机构、反向曲柄滑块及曲柄滑块机构组成,只要按下手柄,控制5个剪刀片联动,完成各向剪切。
2.2.1 空间凸轮的设计
为了设计符合要求的空间凸轮,首先将复杂的空间凸轮转化为相对简单的直线凸轮进行分析。预设初始参数,设计出直线凸轮,如图5所示。凸轮外圈上的外刀片固定不动,剪刀刀柄嵌在直线凸轮的凹型口中,直线凸轮在剪切平面的左右移动过程中,可以控制剪刀刀柄来回旋转,完成剪刀的张合动作。

图5 直线凸轮示意图Fig.5 Schematic diagram of linear cam
当直线凸轮的右行程超出临界线右边线,剪刀刀柄会脱离直线凸轮的凹型口,直线凸轮不能控制剪刀片。同理,当直线凸轮左行程超出临界边线,直线凸轮不能控制剪刀片。
为防止剪刀脱离直线凸轮,必须设置一定的限位。为了更节省材料及采摘果实时采摘头部与果实接触的内环面尽可能接近圆弧面,方便采摘果实,不采用增添材料制造挡阶,而是采用外圈内壁上切除部分材料的设置,左右挡阶对剪刀转角进行限位处理。在外圈上设置一定距离的挡阶,利用刀背与内圈进行限制剪刀片过大转角。
设左右挡阶与剪刀转动轴所处的竖直平面距离均为11 mm,直线凸轮右移,将剪刀推到张开位,会被限位挡阶阻挡住而不能右移,在三维装配体上设置限位,内刀背面与挡阶面相切时为极限状态,此时测得直线凸轮右行程dx=6.90 mm,远小于极限右行程S1=7.6 mm;直线凸轮左移,将剪刀推到闭合位,会被限位块阻挡而不能左移;同样,在三维装配体上设置限位,此时刀尖与右挡阶接触时为极限状态,测得直线凸轮左行程dx=6.44 mm,远小于极限左行程S2=7.18 mm),检验结果符合实际功能需要。
直线凸轮在剪切平面的总行程为6.90+6.44=13.34 mm,相对于外圈中心轴转动角度约为7°(内圈直径为140 mm)。为实现5个剪切位联动,将控制5把剪刀片的直线凸轮组合成了一个环形空间凸轮,空间凸轮结构如图6所示。
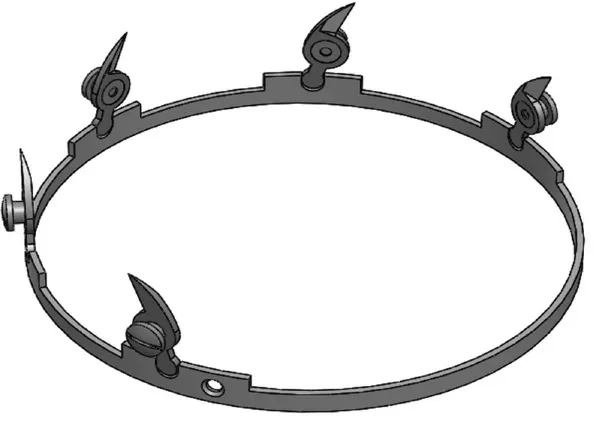
图6 直线凸轮构成空间凸轮Fig.6 Linear cams form spatial cams
2.2.2 曲柄滑块结构的设计
当成环形空间凸轮转动时,可带动5把剪刀同时运动。为了将把手的运动转化为空间凸轮的转动,采用如图7所示的机构。图7中,BCD,DEF各构成一个曲柄滑块机构,手柄AC绕B点转动时,可使滑块D沿直线方向移动,滑块D移动时,可带动曲柄EF转动,即带动空间凸轮旋转。为了简化结构,我们将曲柄滑块机构BCD隐藏于手持杆中。
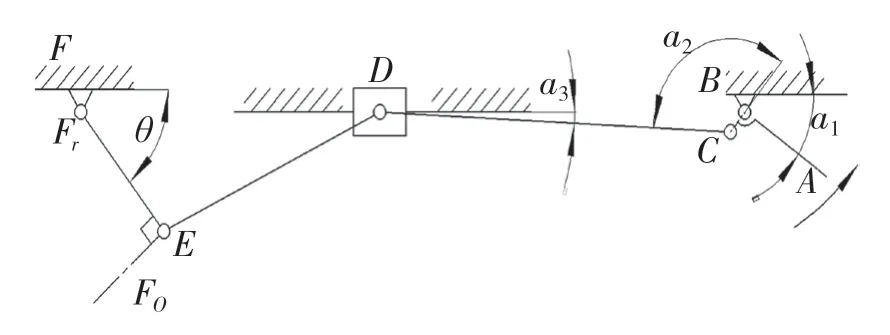
图7 传动机构简图Fig.7 Transmission mechanism diagram
为保证最大省力,需要对各个连杆长度(lEF,lDF,lCD)及曲柄初始角度(θ)进行确定:
机构主要由曲柄滑块BCD,DEF组成,曲柄滑块BCD装在伸缩杆中,伸缩杆直径为18.5 mm,伸缩杆伸出到极限状态长度为3.5 m,lAB=150 mm,lBC=27 mm,操作者可以比较舒服地施力,握把手时施加力Fin=10 N,控制把柄(杆AB)转动角度a1=5°~75°,滑块行程为20.4 mm。
内圈直径为140 mm,根据柑橘属中最大的类别而设计。为保证采摘过程不会产生干涉,lEF≥0.07 m;为保证行程能够满足剪切,空间凸轮在外圈切向的行程需大于13.5 mm。
剪切时,人手输入力Fin,根据转矩平衡原则

滑块受到的力

由式(1)、式(2)解得
令lED=x1,lDF=x2,lEF=x3,根据三连杆长度确定θD

由海伦公式

可得

根据上述要求建立数学模型:

式中:x1,x2,x3——设计变量;M(X)——剪切力矩;Ci(x)——连杆长度关系表达式;L(x)——空间凸轮在外圈切向上的最大行程。
基于Isight平台搭建力矩最大化设计流程,将力矩M(x)设置为目标函数,限定连杆长度变化范围、连杆长度互相影响范围、连杆EF转角范围,采用NPQLP序列二次规划法求解组合模型[5]。目标函数的迭代收敛曲线如图8所示。

图8 迭代收敛曲线Fig.8 Iterative convergence curve
最终分析得最佳参数如表1所示。

表1 最优参数表Tab.1 Optimal parameters
2.3 自由伸缩机构
为适应不同采摘范围的橘子,该机构主要由内空心杆、外空心杆件、滑块拉动及锁点定位杆件、节点锁扣件等组成,二维结构图如图9所示。使用者拉长伸缩杆到合适位置,通过弹簧自动锁扣扣在合适长度的节点上,完成伸缩;当需要改变长度时,按下节点锁扣件,拉动内空心杆就能再次改变长度。由于伸缩杆在当今较为成熟,直接根据行程选型为1.8~2.8 m。一按一拉完成伸缩,操作简便,符合人性化的设计理念。
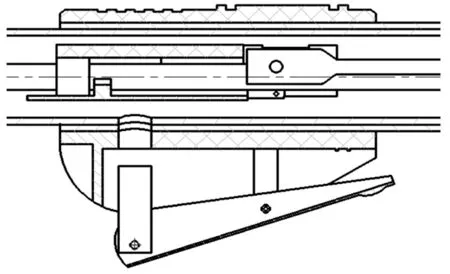
图9 伸缩机构Fig.9 Telescoping mechanism
为了保证在使用过程中能达到所需要求,应用有限元软件对中间的空心长杆进行了静应力分析。中间空心管主要参数为:杆件材料选择铝合金,壁厚2 mm,空心管外径为22 mm,全长2 800 mm,负载合力为10 N,只固定手扶持位置。图10是有限元分析应力图及位移图。

图10 有限元分析结果图Fig.10 Results of finite element analysis
由分析结果可知,受力情况正常,远小于屈服应力,符合强度要求。整根伸缩杆上,离固定端越远,变形位移越大。位移最大之处在于采摘头部,由图可知,本模型最大位移约为5.2 cm,符合使用需求。
3 设计效果评价
本设计提高单人采摘效率2倍以上,远远高于市面上各类采摘杆,大幅度降低了人工采摘成本,提高了经济效益。除此之外,本设计结构精简、成本低廉,能适应各种采摘环境,且操作方便。文献[6]中提到,采摘机械发展方向应为低成本、高效率,能让农民买得起、用得起,用处多等。而本采摘器不仅可以采摘橘子,还可以采摘其他类似的果实以及农作物,应用范围基本没有限制。本作品还可用于观光农业的水果采摘活动或橘子采摘郊游活动。综上所述,本作品具有较大的市场需求。本作品的开发不但有良好的经济效益,还有广阔的市场前景,而且对新型辅助人工高效率采摘机械装置的开发和研究具有重大意义。
4 结语
针对国内橘子采摘问题,提出了一种高效橘子采摘机械装置,并且已经完成实物制造及实地采摘试验,效率相比人工大幅度提高。该项设计解决了当今橘子采摘中存在的种种问题。
