基于CAN总线的悬浮式转向驱动桥电气控制系统设计
2021-06-02张翠英仪垂良刘学峰任冬梅张成保
张翠英,仪垂良,刘学峰,任冬梅,张成保
(250100山东省 济南市 山东农业机械科学研究院)
0 引言
发展大功率、作业能力强的重型农业装备是我国农业机械的主要方向[1-2]。随着精准农业的发展需求以及物联网等新兴技术的推动,对智能重型拖拉机也提出安全、可靠、舒适、节能、高效的要求。作为智能重型拖拉机的关键零部件,配套驱动桥的开发成为亟需攻关的技术[3-5]。山东省农业机械科学研究院研制一种全独立式悬浮转向驱动桥[6],通过机电液控制,实现了驱动桥自适应各种工况。本文主要介绍该驱动桥的电气控制系统设计。
1 全独立式悬浮转向驱动桥总体结构与工作原理
本文涉及的全独立式悬浮转向驱动桥的结构如图1所示,主要由前中央传动总成、驱动桥壳体总成、轮边减速器总成、左悬浮摇臂总成、右悬浮摇臂总成、转向油缸总成、液压系统、电控单元等部分组成。

图1 全独立式悬浮转向驱动桥结构Fig.1 Structure of fully-independent suspended steering drive axle
悬浮式驱动桥左、右悬浮摇臂总成对称安装于驱动桥壳体总成的两端,左、右上悬浮摇臂转轴处各安装一悬浮高度传感器,用以实时监测车辆颠簸的程度。在驱动桥壳体与下悬浮摇臂之间设有悬浮支撑油缸,执行控制单元指令,用以维持车辆的动态平衡。该悬浮式转动驱动桥的桥体为三段式结构,可分别对左右轮进行独立悬浮控制。
2 全独立式悬浮转向驱动桥电气控制系统原理
针对国内农机的实际需求[7-9],兼顾仪器的通用性、可扩展性,本文涉及的悬浮控制系统主要由硬件系统与软件系统2部分构成,硬件系统包括主控系统、接口控制系统、角度采集系统、电源系统、液压系统等。为了与主机控制系统匹配,控制系统采用具有较强的抗电磁干扰性和较高的通信速率的CAN总线技术,此技术已广泛应用到农业机械的整机通信网络中[10-12]。电气控制系统组成框图如图2所示。

图2 电气控制系统组成框图Fig.2 Composition block diagram of electrical control system
电气控制系统的控制流程是微处理器(本系统采用单片机STM32F103C6T6)根据霍尔角度传感器采集悬架传感器反馈的悬浮油缸高度,运算后输出相应的大小的脉冲电流去控制液压系统的4个比例电磁阀的开口开度,控制悬浮油缸的进出油量调节支撑刚度。同时,霍尔角度传感器把实时车辆颠簸程度发送给微处理器,形成闭环反馈控制。控制原理图如图3所示。

图3 电气控制原理图Fig.3 Principle diagram of electric control
为了适应车辆不同作业模式,支持悬浮低位机械限位模式和悬浮中位锁止模式,方便车辆运输、转场和精准作业。
主要技术指标如表1所示。

表1 控制系统技术指标Tab.1 Technical index of control system
3 全独立式悬浮转向驱动桥电气控制系统硬件系统设计
硬件系统的设计在满足使用要求的前提下,力求做到功能完善可靠,使用与维修方便。本文涉及的硬件系统一律选用技术成熟的工业级元器件,所有模块为可拔插式。整个硬件系统可分为主控系统、接口控制系统、角度采集系统、电源系统与液压控制系统5部分,如图4所示。

图4 控制系统主板Fig.4 Control system motherboard
3.1 主控系统
主控系统采用单片机STM32F103C6T6为核心,增加一些外围电路,实现对CAN通信信息和悬浮传感器信息的处理以及对液压系统的控制,硬件设计如图5所示。

图5 主控系统电路Fig.5 Main control system circuit
通过CAN通信来接收车辆行驶速度信息,预判车辆的行驶状态,如加速行驶、减速行驶、匀速行驶等。输入、输出电路都包含滤波程序,确保指令传输正确。通过悬浮传感器和比例电磁阀控制器,形成整个闭环的电气控制系统。系统根据车辆的颠簸程度动态调节悬浮油缸的支撑高度,使悬浮油缸维持在预设好的平衡高度,维持车辆驱动桥左、右悬浮摇臂动态平衡,减小车辆的颠簸,进而使驾驶者拥有优越舒适的驾驶体验。
3.2 接口控制系统
接口控制系统由RS485接口、CAN接口、开关接口组成。开关接口使用典型光耦输入电路,接收开关的电平变化,实现控制系统模式。CAN接口由TJA1040T芯片与外围电路组成,接收来自系统外部的车辆行驶状态数据。RS485接口由TP8485E-SR芯片与外围保护电路组成,方便系统的上位机调试。硬件设计如图6所示。

图6 接口系统电路Fig.6 Interface system circuit
3.3 角度采集系统
角度采集系统由2个霍尔角度传感器与AD采集电路组成,霍尔传感器输出模拟信号,经过AD转换电路后由微处理器处理,实现读取悬浮角度。硬件设计如图7所示。

图7 角度采集系统电路Fig.7 Angle acquisition system circuit
3.4 电源系统
电源系统电路负责整个系统的供电,整个电源进线端用电源进线滤波器抑制经电源线的传导干扰,输入电压为12 V的直流电,经直流降压斩波电路输出为5 V和3.3 V直流电,还有4路电流为2 A的输出。硬件设计如图8所示。电源具有过流、过压保护能力,减少了电源波动对系统的损害。
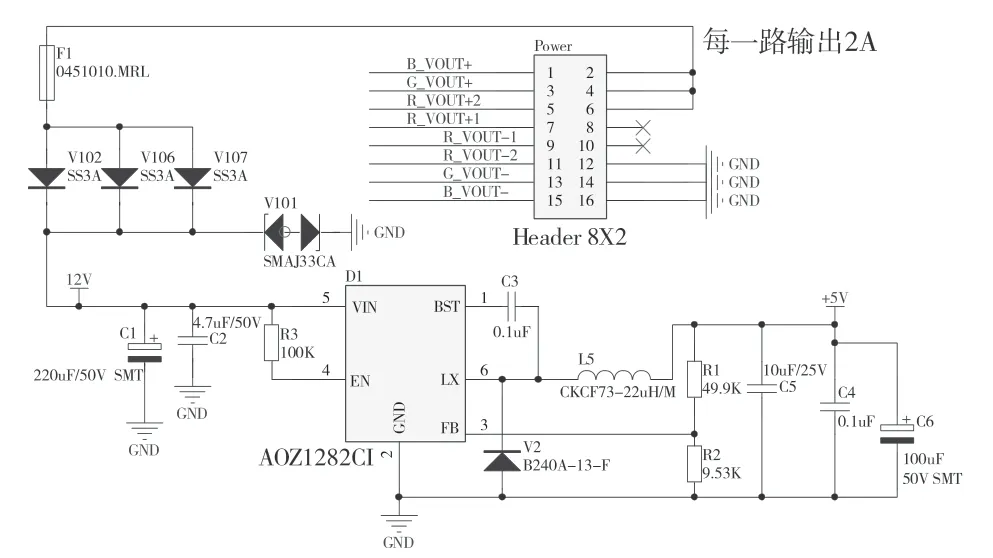
图8 电源系统电路Fig.8 Power system circuit
3.5 液压控制系统
液压控制系统通过单片机STM32F103C6T6以IIC的方式输出控制信号,由控制芯片转化为电压信号,再由四路驱动芯片根据控制电压输出不同的电流,实现对液压比例电磁阀的独立控制,硬件设计如图9所示。

图9 液压控制系统电路Fig.9 Hydraulic control system circuit
4 全独立式悬浮转向驱动桥电气控制系统软件系统设计
4.1 软件系统总体框架
为实现根据工作模式、载荷的变化量、颠簸程度来控制液控单元动作,以适时改变液压系统对悬浮机构的支撑刚度,有效地吸收消化各种工况、因素对车辆造成的冲击震动,设计了如图10所示的软件系统总体模块框图。软件设计的过程中充分考虑系统的鲁棒性、可扩展性,利用成熟技术,减小技术风险。

图10 软件系统总体模块框图Fig.10 Overall block diagram of software system
程序开始以后,首先会对CAN通信、串口等一系列外设进行初始化,然后会判断悬浮系统的工作模式。如果工作在悬浮低位机械限位模式,则会开始实时接收CAN通信传来的车辆当前的运行信息,如车辆速度、加速度等参数,同时也通过串行通信接收霍尔角度传感器发来的车轮悬浮信息,并以此判断此时的路面信息。通过对所获取的数据进行算法处理和整体运算,得到一个调整液压系统的参数,并发送给液压控制系统,通过脉冲电流对比例电磁阀开口开度进行调整。如果工作在悬浮中位锁止模式,系统会给液压系统一个特定参数,使液压系统调整到预设高度后锁止,不再适时调整驱动桥支撑强度。
4.2 调试界面设计
为方便调试与操作,设计了人机友好的调试界面。将控制板联入系统以后,接好外围设备(比例阀、霍尔传感器、开关量等),并通过RS485接口连接至电脑,将电脑端配套软件打开并连接好端口以后,给悬浮控制板上电,此时会显示2个霍尔角度传感器的角度值,分别拖动4个滑块,就可以控制比例电磁阀输出电流,从而调节悬浮油缸的高度。界面窗口如图11所示。

图11 上位机软件界面Fig.11 Host computer software interface
4.3 提高系统鲁棒性
由于本控制系统拟用于重型拖拉机上,其工作环境复杂,采用卡尔曼滤波器(Kalman·Filter,KF)估计方法,只要初始值选择正常,就可以忽略外界干扰,确保采集的数据符合实际。系统使用增量式PID控制技术,使得悬浮传感器值和液压柱高度建立一种平衡关系,从而实现对悬浮油缸的支撑控制,最终实现车辆的平稳运行和驾驶的舒适体验。同时保证当微处理器发生故障时,系统仍能保持原值,车辆不会发生危险情况。
5 电磁兼容性设计
由于整个系统内微处理器使用和环境的影响,会造成脉冲噪声、放射电磁场、静电、雷击、电压变动等干扰,使控制系统故障或失效。为解决电磁兼容性问题,主要采取了以下措施:(1)电源进线端用电源进线滤波器抑制经电源线的传导干扰。(2)测试电缆采用屏蔽电缆。(3)对可能引起干扰或易受干扰的信号馈线要采取屏蔽措施。(4)电路中对干扰敏感的元器件和部件要加以屏蔽。(5)合理设计数字地、模拟地、屏蔽地、电源地等各种接地关系。(6)在系统结构上对散热孔等容易引起电磁泄漏的地方要采取屏蔽措施。
6 结论
根据全独立式悬浮转向驱动桥的工作特点和要求,设计了悬浮电气控制系统的框架和原理图,并详细设计了硬件与软件系统。在悬浮电气控制系统设计过程中,采取了电磁兼容性措施。本文涉及的电气控制系统能够精度较高地实现悬浮式转向桥全自动悬浮控制,不仅适用于重型拖拉机,还适用于联合收获机、旋耕机等农业机械设备。
