空气制动预压力对全自动驾驶地铁列车精准停车影响的分析
2021-05-22廖绍辉姚风龙杨东韩宇
廖绍辉,姚风龙,杨东,韩宇
(中车长春轨道客车股份有限公司,长春130062)
0 引言
随着国内城市轨道交通的发展,近几年来,各大城市尝试开通全自动驾驶列车。2016年底开通的香港南港岛线是正式运营的GOA4(Grades of Automation 4)等级的全自动无人驾驶线路,随后2017年开通的北京燕房线及2020年底开通的成都轨道交通9号线等也是按照全自动驾驶设计运营。为了提高运营效率,对全自动驾驶列车停车精准度提出了更高的要求。虽然列车通常设置对标不准、自动调整等功能,但是一次性对标成功对运营效率的提高是显而易见的。而地铁列车最后的停车阶段,通常是由电制动和空气制动混合完成,由于在电制动退出空气制动力接管时,很难按照理论的电-空制动力曲线进行精确的转换。空气制动接管时有一定的延时性,最终影响精准停车。本文对提前施加空气制动预压力对停车精度的影响进行分析研究,得出了良好的匹配关系,最终实现列车的精确停车。
1 全自动对标模式原理
在全自动驾驶模式(FAM)下,信号系统根据列车的实施速度、加减速度曲线及列车位置,自动输出动态的速度曲线,并控制列车运行速度。按列车的时间状态动态调整牵引、制动指令及级位,实现列车的自动运行。列车网络正常情况下,信号系统车载装置(VOBC)将牵引制动指令及级位发送给列车网络系统(TCMS),再由网络系统将相应的指令及级位送牵引和制动系统,实时调整输出的牵引和制动来控制车辆的精准对标,通常情况下对全自动驾驶对标精度要求为:列车客室车门中心线与站台屏蔽门中心的距离在±300 mm以内。
2 列车制动分析
地铁列车的制动模式分为空气制动和电制动两种:1)空气制动需要通过安装在转向架的基础制动装置施加制动力,受制于制动缸充气、排气性能的影响,有一定的延迟性。在停车阶段如果控制误差较大,难以实现对停车精度的准确控制。2)电制动是通过控制电子元器件的通断,利用电动机工况转换实现制动效果,动态调节效果较好,更容易实现制动过程的精准控制[1]。
在列车低速停车阶段,通常是由电制动和空气制动的混合完成列车制动,最后由空气制动停车,空气制动接管电制动的及时性直接决定了对标的准确精度。
2.1 电空制动混合
在低速范围内,停车制动阶段被激活,制动控制单元(BCU)接收牵引控制单元(TCU)发送的停车制动指令(电制动衰减信号),控制空气制动施加。通常情况下,当速度降到设定值(约8 km/h)时,牵引系统发出电制动衰减信号,经短暂延时(通常设置为400 ms),牵引系统控制电制动以设定的斜率(如1.0 m/s3)退出,如图1所示的t0~t1时刻曲线。BCU接收到任何电制动衰减信号置位后,空气制动按比例增加(如1.0 m/s3),如图1所示的t1~t2时刻曲线。
正常情况下,当速度低于0.5 km/h时,且非牵引工况下,如果制动级位高于保持制动级位,BCU按照制动级位施加空气制动;如果制动级位低于保持制动级位,BCU按照设计的保持制动级位施加空气制动(考虑冲击限制)。电空制动混合示意图如图1所示。
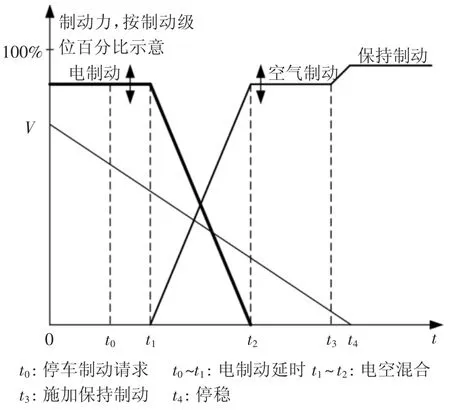
图1 电空混合制动示意图
2.2 影响列车对标的主要因素
影响列车对标的主要因素是停车阶段制动系统的跟随性和信号系统控车的准确性。在列车高速阶段,电制动的响应速度因其是对电子元器件进行控制,响应速度通常比较快,可以较好地跟随信号系统的控车策略;空气制动系统因其特有的机械特性,跟随性稍显不足。
1)停车阶段空气制动系统的跟随性。车辆在低速进入停车阶段时,如果电空转换匹配出现瑕疵,牵引控制单元输出的电制动衰减信号存在延时不足,出现牵引控制单元电制动力减少时,空气制动没有做出及时的响应和补充电制动力的不足,导致列车获得的总制动力减少,出现车辆冲标情况。王鹏[2]在广州地铁5号线对此做过相关研究,发现车辆自动模式(ATO)下,在乘客大流量时频繁发生停车不准,原因是车辆低速工况下电空制动混合配合不好导致。路象群[3]在广州地铁A2型车项目发现牵引控制单元电制动力衰减与空气制动上升期间约1 s,该过程在车辆自动模式(ATO)时是无法实现列车制动力调整的,电制动力的衰减和空气制动力的上升的匹配关系显得尤为重要,若匹配不当则会出现过制动或制动力不足的情况,导致列车停车不准。牟平[4]发现在哈尔滨地铁1号线车辆电制动的延时退出对电空制动混合的影响,因空气制动系统从收到制动指令到建立空气制动力的时间需要400 ms左右,牵引控制单元电制动力的延迟衰减时间要与空气制动系统制动力的建立时间匹配,才能实现电空转换的平缓过渡,理想的电空转换如图1所示。
为了弥补空气制动系统机械响应较慢的不足,在列车到达设定速度时,对制动缸施加预压力,以缩短空气制动的响应时间,提高其跟随性能,尽可能实现电空制动的平滑过渡。
2)信号系统控车的准确性。信号系统控车的准确性主要取决于对列车位置、速度的准确获取和控制算法的精准性。
本文主要分析电空制动混合过程中空气制动系统的跟随性对精准停车的影响。
3 案列分析
3.1 空气制动预压力分析
以某全自动驾驶地铁项目为例,对空气制动预压力在列车精准停车方面影响进行分析。该项目是A型不锈钢车项目,轴重不大于17 t,空气制动采用轮盘制动型式。通常手动驾驶列车情况下,为了缩短空气制动在电制动和空气转换阶段的响应时间,空气制动预压力设定值在0.02~0.04 MPa之间。李洁等[5]为了缩短空气制动控制单元(BCU)的响应时间,在制动工况时,当列车速度小于12 km/h时,设定BCU自动施加预压力(0.035 MPa左右),响应时间的提升得到较好的结果。采用踏面制动单元的成都轨道交通2号线采用空气制动预压力0.02 MPa,实现了较好的列车自动控制模式(ATO)的对标性能[6]。测试案例在2012年设计阶段停车控制阶段空气制动预压力策略如下:在列车速度达到20 km/h时,空气制动系统施加0.03 MPa的预压力,以缩短系统的响应时间。
列车自动驾驶系统在测试阶段,列车出现欠标的情况时有发生,在空载期间,发生欠标的次数逐渐增加。正式商业运营一周后,整条线路一次性停车欠标的次数从10次逐渐增加。据统计,每辆车都曾发生过一次性停车欠标现象。
经分析可能是施加预压力后,闸片与制动盘之间产生了一定的制动力。经测试发现,空载工况下预压力大约产生0.07 m/s2的减速度,大约占空载制动力的6%(约8 kN)。由于列车自动驾驶系统已经对预压力产生的气压制动力进行了补偿,因此初始设置的制动需求被认为是不准确的。在混合制动后,列车自动驾驶系统必须重新修正制动需求,导致列车出现对标不准的欠标现象。针对以上情况,首先对空气制动系统相关参数进行测定。
3.2 空气制动控制压力精准度测定
在列车自动驾驶系统发出不同制动级位的情况,对空气制动系统的性能进行测试,测试工况如下:制动级位4%,列车空载工况下制动力约6.8 kN;制动级位5%,制动控制单元需输出约0.03 MPa的压缩空气,试验结果表明引起0.07 m/s2的减速度,如上文所述;制动级位为0时,制动力也为0。在车辆速度超过20 km/h时,按如下制动级位顺序进行测试:20%→30%→40%→30%,检测制动缸压力,每3 s改变一次制动级位需求。在车辆速度小于20 km/h时,施加20%制动级位,测量制动缸压力。
测试结果如表1所示,测试结果完全符合空气制动系统设计要求。

表1 控制压力精度的测试结果 MPa
3.3 制动缓解的时间测试
前期测试软件空气制动系统施加和缓解按冲击满足0.8 m/s3设定。在新版测试软件中,通过增大释放冲击率到1.0 m/s3,在空载特定工况下,测试结果显示最大常用制动缓解的时间缩短约20%。在一定程度上,可以提高响应速度,但是影响较小。王亮等[7]在调整南宁轨道交通1号线停车精度时,曾采用过增大冲击到1.2 m/s3的方案,对特定项目产生了积极的影响。经评估,案例项目未采取增大冲击率进行调整的方案。
以上测试表明,空气制动系统符合设计要求。但是在电空制动混合后,因空气制动系统的缓解响应时间过长,列车自动驾驶系统发现制动力过大,但是已没有足够时间进行调整,导致欠标频率的增加。
3.4 空气制动系统预压力值设置的修正
与列车自动驾驶系统的控制策略相协调,并通过现车测试,将空气制动系统预压力由0.030 MPa调整为0.021 MPa,保持之前设定的制动系统施加和缓解冲击率为0.8 m/s3。正线现场空载测试获得良好的停车精度,在全部多轮测试中,停车精度(客室车门中心线与站台屏蔽门中心线距离)均在±250 mm以内,未出现停车不准现象,完全满足全自动驾驶对停车精度的要求。
预压力的实测结果如图2所示,软件设定值为0.021 MPa,现车实测值为0.014 MPa,符合空气制动控制精度要求。
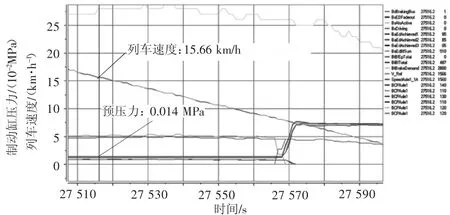
图2 预压力现车实测值
4 结语
1)通过对电空混合制动原理分析和现场试验验证,获得空气制动系统预压力的合理设定值,为全自动驾驶列车的精准对标停车提供了有力的参考依据;2)合理设置预压力,提高空气制动系统的响应时间;减小或忽略因预压力带来的额外制动力对停车精度的影响;3)提出的合理空气制动预压力设定值,可以作为全自动驾驶列车空气制动系统设置预压力的参考值使用,缩短全自动无人驾驶车辆项目对标调试周期。
