温室种植精准对靶喷雾机器人的研究
2021-05-21喻晨
喻 晨
(新疆农业科学院 农业机械化研究所,新疆维吾尔自治区 乌鲁木齐 830000)
就当前植物植保机械来讲,采用的手动喷雾器80%依然是背负式。喷雾器在应用过程当中存在明显的跑、冒、滴、漏等情况,对于农药利用率造成很大影响,而且在喷药过程中,时常出现施药中毒情况,尤其是在温室环境条件下进行喷药,中毒事件时有发生。为此,对于植株和病害部位进行精准对靶喷雾施药成为当前的研究重点[1]。但就目前情况来讲,在温室种植过程当中,精准对靶喷雾机器人方面的研究尚处于初始阶段,还有很多问题亟待探索,尤其是非结构环境条件下喷雾机器人工作过程当中,面对作业对象多义性的形态和颜色以及复杂的背景信息,温室作业过程中空间改变以及光照条件改变,都给机器人感知信息、运行控制和规划轨迹带来很大影响[2-5]。基于此,本文主要以温室种植过程中黄瓜霜霉病为研究对象,充分考虑黄瓜种植模式以及温室环境,对精准对靶喷雾机器人进行设计,通过计算机视觉,来获取黄瓜病害信息,通过系统分析,开展对靶喷雾。
1 对靶喷雾机器人结构与系统原理
该系统主要包括机械臂以及移动平台、变量喷嘴和病害诊断分析系统等几部分(见图1)。其中1 为移动平台属于高架轨道,通过电机(0.1~0.3 m/s)进行驱动,2 为导轨和黄瓜垄相互垂直,设置在和地面相差3.0 m 的高度,移动平台能够通过黄瓜植株顶部进行运动。喷杆运动利用机械臂控制,达到对靶效果,在直角坐标系统上机械臂可以自由地进行各个方向运动,运用剪切式升降结构控制z向运动,直线导轨控制x、y方向,喷杆和旋转定位相平行,x向通过腕部来达到控制效果。
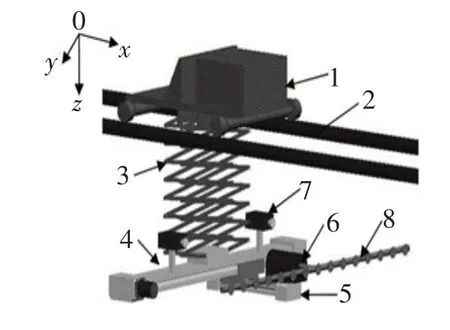
图1 对靶喷雾机器人结构示意Fig.1 The schematic diagram of target spraying robot structure
对于病害信息诊断系统而言,主要在y 轴直线导轨4 上安装固定2 台彩色摄影机(由双目视觉系统构成),对前视场作物具体情况进行实时图像采集,同时对作物病害情况做出准确判断,控制施药量。
喷杆8 长为1.2 m,喷嘴6 按照0.2 m 的距离均匀分布其上,主要利用高速电磁阀实现控制,机器人针对喷嘴区域相应病害信息,利用PLC 来实现电磁阀控制,保证喷药过程中,喷药时间和培养量的控制。
在机器人运行过程中,根据温室黄瓜栽培垄的特点,将磁定位预设在导轨之上,喷雾机器人有效启动,而且在导轨运动基础上将机器人启动实施喷雾。首先进行定位检测,准确标记,之后停车,根据对应位置,下降剪切式升降台,当与黄瓜高度1/2 相符合时,喷杆随着x向伸出,同时运用腕关节回转,使其垂直。当前的场景图像利用双目视觉系统来完成,对图像当中存在的病害情况进行判断,然后根据直线导轨y向、x向直线导轨以及喷秆从一侧端部移动至另一侧,找准病害位置,合理控制电磁阀,保证对靶喷雾,直至将所有工作全部完成。
2 自由度机械臂设计
植株在温室结构条件下都是规则的生长,所以进行机械臂整体构架机器人设计中,逆运动学是对靶喷雾机器人的主要特征,而且拥有解耦3 个关节。因此,为了避免有运动学奇异点发生,控制和减少系统复杂性,在图1 当中,施药4 自由度机械臂在移动平台下吊装,可以自由地针对各个方向植物病害进行精准对靶喷药,利用回转腕关节来实现喷杆控制,让其确保合适的姿态来精准喷药,机械臂具体运动参数见表1。
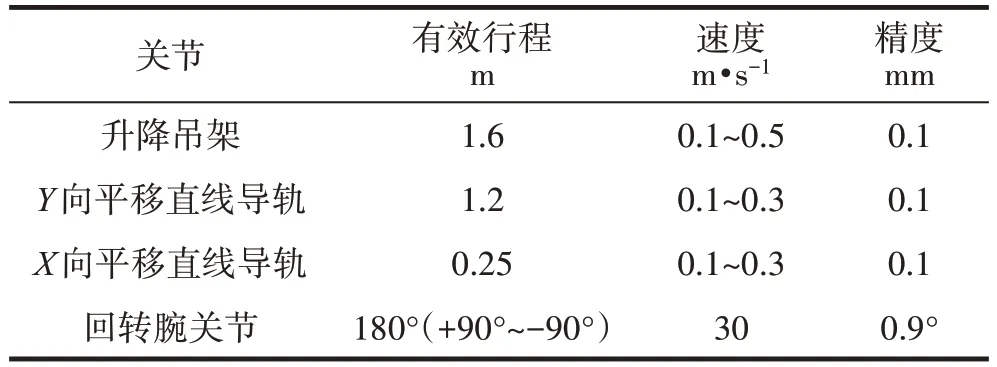
表1 机械臂关节参数Tab.1 The joint parameters of manipulator
系统中z向运动是难点,剪叉式升降吊架不仅具有很好的刚性强度,而且具有较大的工作范围。在移动轨道运动平台过程中,升降吊架保持在收缩的状态,使移动过程当中机器人与导轨和黄瓜植株出现的干涉问题得到很好解决,并确保机器人稳定运行。
剪叉式升降吊架在固定端进行驱动,其操作的角度应当进行8°~35°保持,为了实现相应的工作高度,对靶喷雾机器人运用10 个剪刀叉来实现相应高度,地面位置上确保0.9~2.5 m 有效行程,运用2副剪叉构成整体结构,在前后方向上布置,充分考虑操作角度,在吊架最低点位置上合理设定,水平线和剪叉杆保持30°夹角,使吊架具有较好的整体稳定性。
3 获取靶标信息
为使靶标信息更加准确获取,应对植株病害作出全面分析,确保定量精准性。如对黄瓜霜霉病信息进行获取时,通过计算机视觉获取病害信息,依照感染叶片病害及其纹理、颜色,判断其感染情况,黄瓜间距为1.4 m,其株距为0.4 m。
通过双目视觉系统应用,搭载OK_AC1300 型2 台摄像机,工作位置相距黄瓜中心0.9 m,摄像机间距为0.6 m,可以完成1.2 m×1.2 m采集范围。
直接计数法以及分级计数法是测定传统植物病害情况的主要方法,然而针对对靶实时喷雾系统,发生病害在时间以及空间上存在非均匀性的特点,植株不同以及不同的叶片,和较大差异性的病害程度,所以需要构建适于温室条件下评价病害的标准。文中把图像采集区域进行6×6 个单元划分,各单元当中按照0.2 m×0.2 m 设置最小的靶标单元,设置最小的单个喷嘴喷幅,处理图像之后,对各个单元病害感染情况进行统计,喷雾过程当中,依照感染情况,确定喷雾时间。
4 结语
运用精准对靶喷雾,可以使农药用量大幅度减少,还能保证作业安全,避免对环境造成更大污染,保证食品质量。本文对精准对靶喷雾系统进行研究分析表明,喷雾系统采用高架导轨模式,在温室种植过程当中,可以根据篱架型作物,按垄种植特点精准喷雾。自由度喷雾机器人运用直角坐标,联合应用电磁阀对喷嘴进行控制,实施对靶精准变量喷雾。研制的温室种植精准对靶喷雾机器人,可以精准地获取黄瓜病害,对作物病害感染情况以及分布特征等精确确定,能够实现精准对靶施药。