挠性航天器的二阶滑模姿态机动控制
2021-05-20吴希岩戈新生
吴希岩,管 萍,戈新生
(北京信息科技大学 自动化学院,北京,100192)
0 引言
挠性航天器在大角度姿态机动中,除了将受到各种环境干扰外,太阳能电池板的驱动、航天器液体燃料晃动,以及机械臂的空间作业操作,同样会激励挠性结构产生振动并引发系统结构参数的变化,而姿态运动与挠性振动之间的相互作用会严重影响系统的稳定性。挠性航天器的高精度姿态控制以及有效的振动抑制是目前业界面临的难点问题[1]。
近几年来,很多有效的控制方法被应用到挠性航天器中。文献[2]设计了自抗扰控制律,对于带有挠性附件的深空探测航天器取得了较好的姿态控制效果。文献[3]针对欠驱动航天器设计了奇异避免的反步控制器,具有较好的控制性能。文献[4]提出了一种基于输出反馈的鲁棒极点配置设计方法,使挠性航天器姿态控制系统具有良好的动态特性。然而上述方法均未考虑转动惯量不确定性对挠性航天器系统的影响。为了减少挠性附件振动、外界干扰力矩以及转动惯量不确定性在运行过程中对挠性航天器姿态的影响,姿态控制器应具有较强的鲁棒性。
滑模控制对系统不确定性具有较强的鲁棒性和抗干扰能力,被广泛应用于挠性航天器控制中[5]。文献[6]针对挠性航天器执行器故障的姿态控制问题,采用饱和函数代替传统滑模中的符号函数,从而减小抖振对姿态性能的影响,实现姿态的高精度控制,然而此方法会使滑模控制的鲁棒性有所降低。文献[7]设计了终端滑模控制器,使姿态角误差和角速度误差可以在有限时间内收敛到零,能有效抑制抖振,但控制参数选取不佳时会出现奇异性问题。高阶滑模可以较好地减小抖振现象的发生。文献[8]针对航天器姿态控制问题,采用高阶滑模控制方法,响应速度快,较好地完成了姿态跟踪任务,但高阶滑模需要高阶导数信息,这会提高计算难度。二阶滑模具有高阶滑模的优点,并且计算复杂程度相对较低。因此将二阶滑模应用于挠性航天器的姿态控制系统设计中,不仅可实现姿态角指令的快速跟踪,也可有效减少挠性附件、外界干扰力矩以及转动惯量不确定性对挠性航天器姿态的影响。
本文针对挠性航天器姿态机动控制,设计了一种二阶滑模控制器。该控制器不仅具有传统滑模控制鲁棒性强、参数变化不敏感等优点,又能在有效消除抖振的同时对姿态角指令实现有限时间跟踪,使姿态角能够在存在扰动时快速跟踪。
1 挠性航天器的数学模型
挠性航天器由刚体和挠性附件组成,姿态可由运动学方程和动力学方程进行描述。
1.1 姿态运动学
姿态参数采用既无奇异性又无冗余度的修正的罗德里格斯参数MRPs(modified Rodrigues parameters,MRPs)表示。设有参考坐标R系,刚体相对R系做定点转动,定点为O。在刚体上取一点A,自转动点O至该点引位置向量OA,初始时刻位置向量处于OA=r,经过时间t后位置向量处于OA′ =r′。根据欧拉定理,仅考虑刚体在0时刻和t时刻的角位置时,刚体从A位置转到A′位置的转动可等效成绕欧拉转轴p转过欧拉转角θ一次完成,如图1所示。
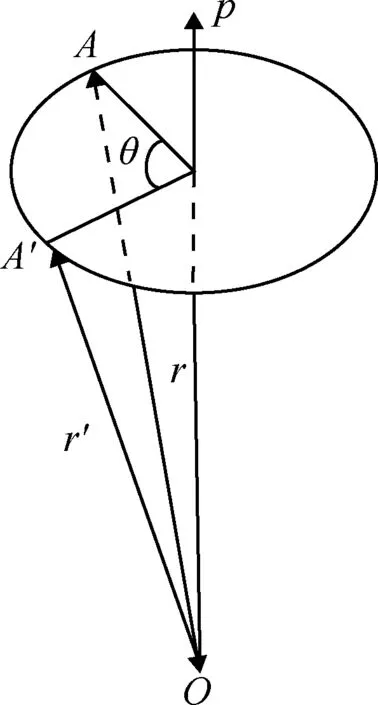
图1 刚体等效旋转示意图
则MRPs定义为
(1)
式中:σ为航天器相对惯性坐标系的MRPs姿态描述,σ=[σ1σ2σ3]T。
姿态运动学方程为

(2)

其中I3为3×3单位矩阵;σ×表示斜对称矩阵:
(3)
定义期望姿态角σd= [σd 1σd 2σd 3]T,期望角速度ωd= [ωd 1ωd 2ωd 3]T,误差姿态角σe= [σe 1σe 2σe 3]T,误差角速度ωe= [ωe 1ωe 2ωe 3]T[9]:
σe=σ⊗σ-1d=
(4)
ωe=ω-ωr
(5)
式中:ωr=R(σe)ωd;R(σe)为坐标转换矩阵:
则
(6)
误差运动学方程为
(7)
1.2 姿态动力学
挠性航天器动力学方程为[10]:
(8)

(9)
式中:J为航天器的转动惯量矩阵;δ∈RN×3为航天器刚体与柔性附件的耦合矩阵;η∈RN×1为柔性附件的模态坐标向量;u∈R3为控制输入力矩;d∈R3为包括重力梯度、太阳辐射、地球磁场等各种环境干扰力矩;C=2ξΩ为阻尼矩阵;K=Ω2为刚度矩阵;ξ和Ω分别为振动模态的阻尼比和自然频率。
将式(9)代入式(8)中可得:

(10)
将式(5)代入式(10)得到角速度误差方程:
(11)
本文的控制目标为:针对式(10)所示的挠性航天器系统,设计姿态控制器u,在有限时间内,既能实现对姿态角期望指令的精确跟踪,又可有效减少挠性附件振动对姿态机动控制系统的影响,对外界扰动和转动惯量不确定性具有较强的鲁棒性。
2 二阶滑模控制律设计
选取滑模面:
sω=ωe+ασe
(12)
对其求导,得到:
(13)
将式(11)与式(7)代入式(13),得到:
(14)
选取二阶滑模趋近律为
(15)
式中:sω=[sω1sω2sω3]T;ea=[ea1ea2ea3]T;ea为系统的增广状态;m≥2,k1和k2为控制增益。将式(14)代入式(15),得到如下控制律:
(16)
基于以上分析,本文的主要控制思想是:利用姿态角误差和角速度误差构造滑模面,选取二阶滑模趋近律,将误差运动学方程和误差动力学方程代入,得到二阶滑模控制律u。利用二阶滑模控制器(式(16))使姿态角快速稳定地达到期望姿态且有效减少挠性附件振动对姿态角的影响。闭环控制结构如图2所示。
定理1对于挠性航天器系统(式(10)),在二阶滑模控制律式(16)的作用下,如果m≥2,并且选取合适的控制增益k1、k2,那么在有限时间内可以使姿态角误差σe与角速度误差ωe收敛到零。
证明将式(16)代入式(11),得到角速度误差系统:
(17)
将式(17)代入式(13),得到
(18)
令
(19)
式中i=1,2,3。于是有
(20)
(21)
整理上述表达式得到

(22)
可将式(22)转化为
(23)
将式(23)写成如下形式:
(24)
取李雅普诺夫函数为
(25)
(26)
(27)
式中:λmin{P}为P的最小特征值;λmax{P}为P的最大特征值。
对式(25)两端求导,得到
(28)
其中
(29)
式中:λmin{Q}为Q的最小特征值;λmax{Q}为Q的最大特征值。则
(30)
由式(27)和(30)可得
(31)
式(31)可转换为
(32)
求解式(32)得到
(33)
则
(34)

3 仿真研究
将本文提出的二阶滑模控制律应用于挠性航天器中。为验证二阶滑模控制律的有效性,进行仿真验证与分析。选取文献[12]的挠性航天器模型参数:
标称转动惯量J0为
转动惯量的不确定性ΔJ为
挠性航天器的中心刚体和挠性附件间的耦合矩阵为
δ=
针对四阶模态,自然频率为Ω1=0.768 1,Ω2=1.103 8 rad/s,Ω3=1.873 3 rad/s,Ω4=2.549 6 rad/s,阻尼为ξ1=0.005 6,ξ2=0.008 6,ξ3=0.013,ξ4=0.025。
在仿真中,初始角速度的值为ω(0) = [0 0 0]T;期望值为ωd=[0 0 0]T;初始MRPs值为σ(0)=[-0.224 25 0.672 78 -0.448 52]T;期望值为σd=[0 0 0]T;则采用3-1-2欧拉表示的三轴姿态角初始值为:俯仰角θ(0)=-90°,滚动角γ(0)=39.6°,偏航角ψ(0)=-17.5°。

干扰力矩为

控制律参数选取如下:
α=0.6,k1=0.3,k2=0.1,m=10,ea初值为零。
为了加以比较,姿态控制器采用本文所设计的二阶滑模控制器和传统滑模控制器(文献[13]),针对挠性航天器分别在标称转动惯量和具有转动惯量不确定性两种情况下进行仿真研究。
当挠性航天器的转动惯量为标称转动惯量时,仿真结果如图3~7所示。从图中可以看出,在传统滑模控制下姿态角的响应时间约为50 s,角速度的响应时间约为55 s,挠性附件振动的前两阶模态不能快速衰减,振动能量为0.21 N·m;在二阶滑模控制下姿态角的响应时间约为30 s,角速度的响应时间约为30 s,挠性附件振动模态均能在25 s内快速衰减,振动能量为0.149 N·m。

图3 MRPs响应曲线
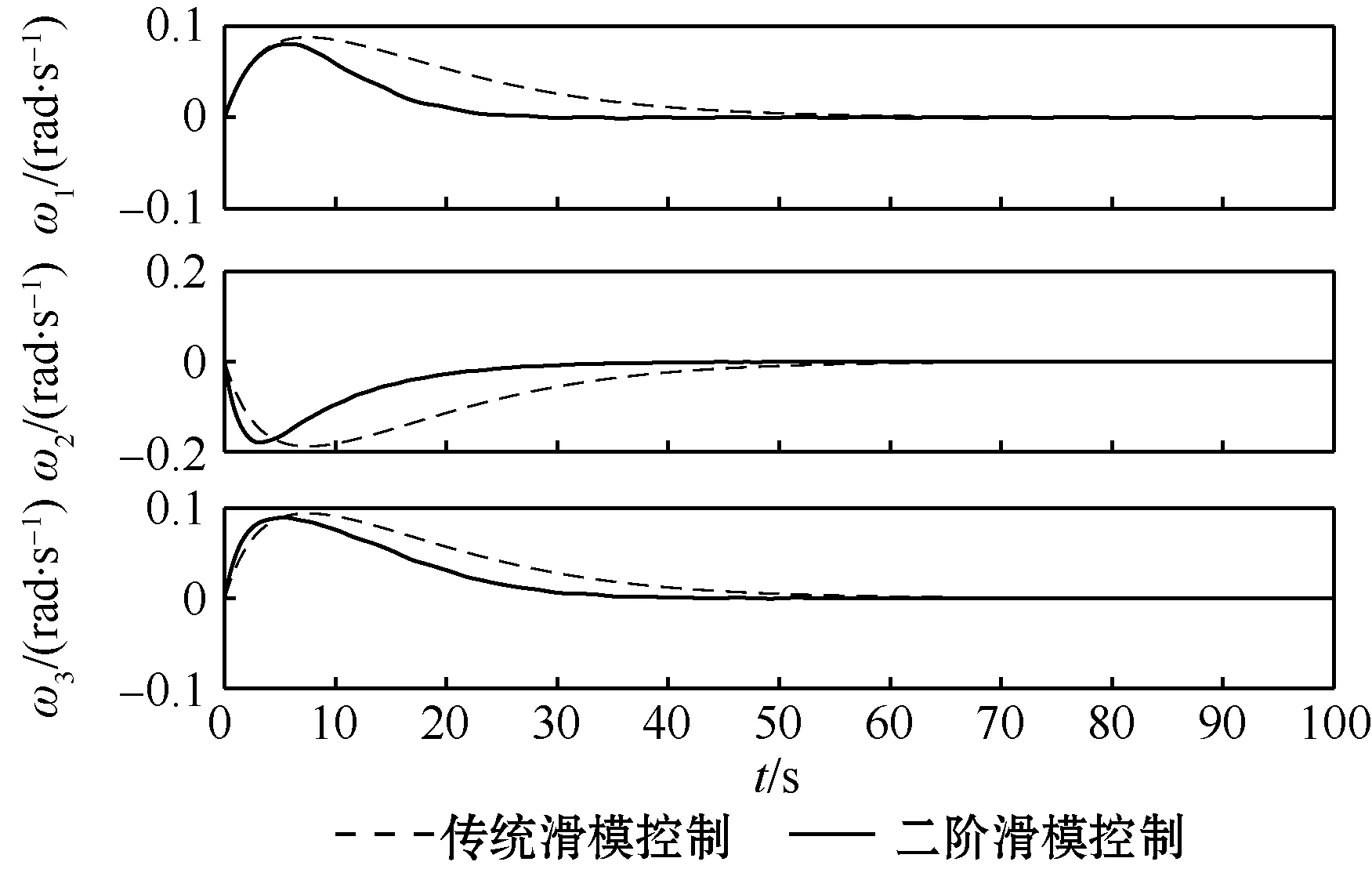
图4 角速度响应曲线

图5 挠性模态响应曲线

图6 控制力矩响应曲线
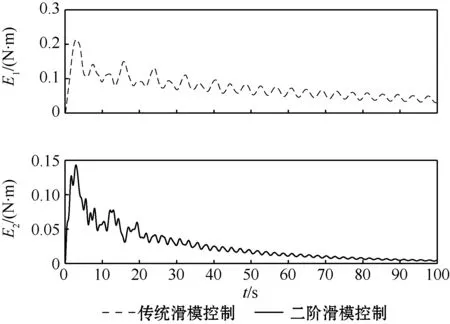
图7 振动能量响应曲线
当挠性航天器具有转动惯量不确定性(J=J0+ΔJ)时,仿真结果如图8~12所示。从图中可以看出,在传统滑模控制下姿态角的响应时间约为55 s,角速度的响应时间约为60 s,挠性附件振动的前两阶模态不能快速衰减,振动能量为0.22 N·m;在二阶滑模控制下姿态角的响应时间约为33 s,角速度的响应时间约为35 s,挠性附件振动模态均能在30 s内快速衰减,振动能量为0.15 N·m。

图8 MRPs响应曲线

图9 角速度响应曲线
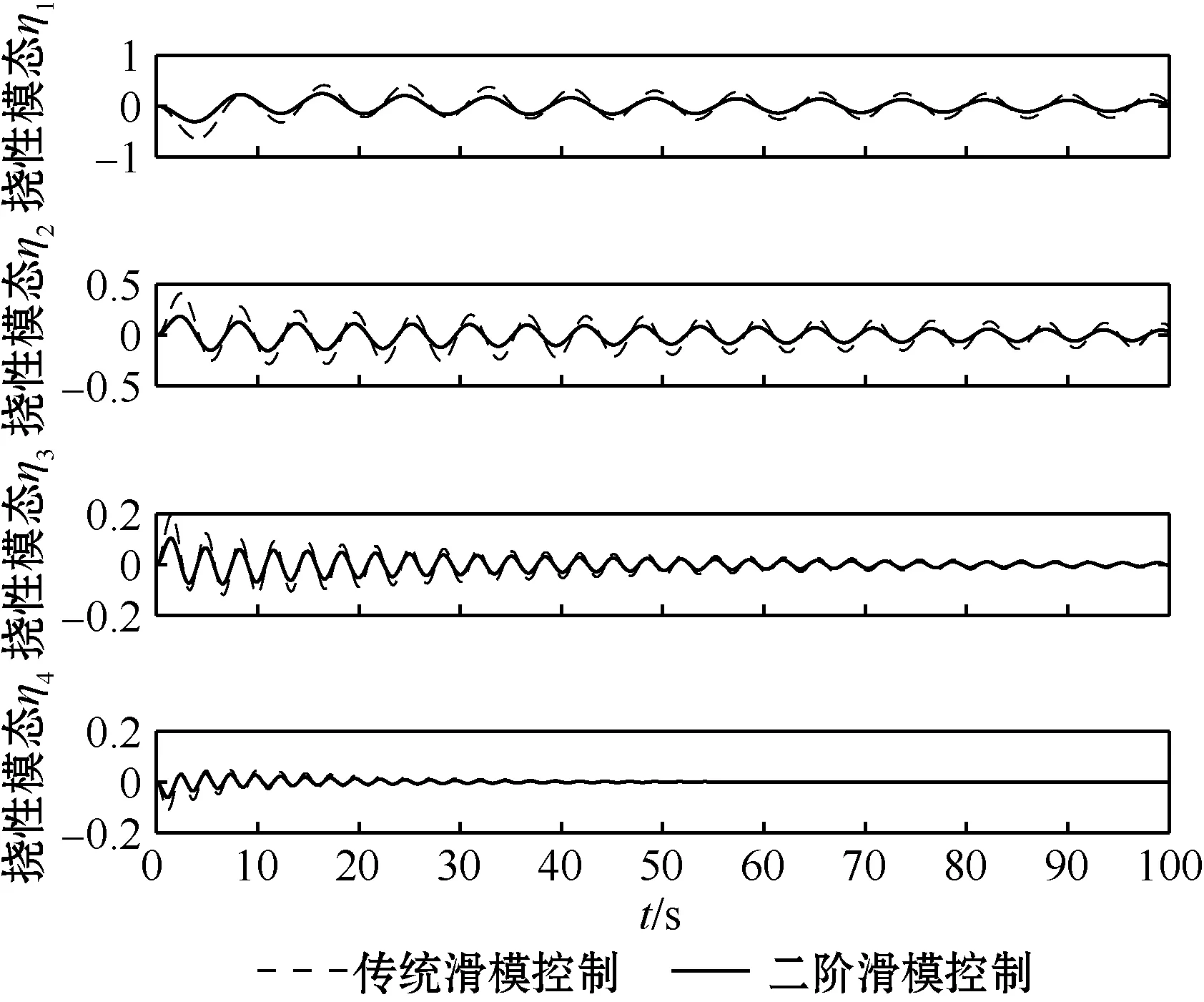
图10 挠性模态响应曲线

图11 控制力矩响应曲线
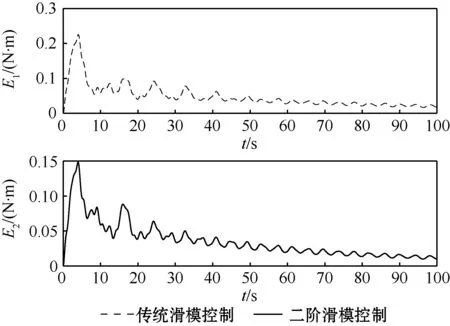
图12 振动能量响应曲线
通过上述仿真分析比较可知,传统滑模控制系统响应时间较慢、控制精度较低,挠性附件振动不能快速衰减,外界扰动和转动惯量不确定性对姿态影响较大。由于二阶滑模控制中的不连续控制输入作用于滑模的二阶导数,使系统切换间的抖振得到有效减弱,所以在具有挠性附件振动、外部扰动以及转动惯量不确定性的情况下,二阶滑模控制系统响应时间更快,稳态误差更小,跟踪精度更高,并可有效抑制挠性附件振动,对外界扰动具有较强的鲁棒性。二阶滑模姿态控制系统在标称转动惯量和具有转动惯量不确定性的两种情况下,均能得到比传统滑模作用下更好的控制效果,可有效减少转动惯量不确定性对挠性航天器姿态系统的影响,具有良好的控制性能。
4 结束语
本文针对挠性航天器姿态控制问题,采用无奇异性无冗余度的修正的罗德里格斯参数表示运动学模型,将二阶滑模控制应用到挠性航天器的控制系统中。二阶滑模能够有效抑制抖振,使姿态角在有限时间内快速跟踪。仿真结果表明,在存在外界扰动和转动惯量不确定性的情况下,所提出的挠性航天器二阶滑模姿态控制系统,可使挠性振动快速衰减,并使姿态角快速而稳定地跟踪期望指令,保证良好的控制精度。该控制方法具有鲁棒性较强、易于工程实践等优点。
