行波超声电机振动模态非线性滑模观测器与协调控制
2021-05-19荆锴林夏萍王婕董砚
荆锴, 林夏萍, 王婕, 董砚
(1.河北工业大学 人工智能与数据科学学院,天津 300401;2. 河北省控制工程技术研究中心,天津 300130)
0 引 言
行波超声电机(travelling-wave ultrasonic motor,TWUSM)利用压电材料逆压电效应激发超声振动行波,进而使定子表面质点以椭圆轨迹运动,从而通过与转子接触摩擦驱动转子旋转。这类电机具有转矩密度大、位置分辨率高、动态响应快、无电磁干扰等优点,在医疗卫生、航空航天等领域的精密驱动系统中得到广泛的应用[1-4]。
由于压电振动以及接触摩擦的非线性,使得电机本体具有很强的非线性特征,并且电机参数也会随着温度变化、接触磨损等发生明显改变,这些因素都将影响电机的精密控制性能。针对TWUSM的非线性、时变性,现有研究多从控制算法上对电机外特性进行优化控制来提高电机运行性能。文献[5]给出了一种非线性补偿PID算法。文献[6]则研究了带有积分分离PID的恒定前馈和基于模型参考自适应控制的自适应反馈和前馈算法,来提高轨迹跟踪精度。史敬灼团队研究了采用简单专家PID控制方法[7-8]以及非线性调节PID参数的模糊控制器[9]来改善电机速度控制。潘松、牛子杰等人则设计了模式推理控制与PID控制相融合的控制算法[10-11],实现超低速宽工作速度范围的高精度的速度跟踪控制。此外,H∞控制算法也被用于提高TWUSM位置控制精度[12-13]。
然而从TWUSM的驱动机理来看,定子的振动以及接触摩擦是产生驱动转矩的关键,然而,目前对TWUSM振动的研究也基于价格昂贵、不易安装的传感器进行电机的性能分析和模型补偿[14-16],而直接用于控制的研究较少。为直接从电机振动特性上对电机运行性能给予控制优化,电机的两相振动模态应当被重点关注。然而由于振动模态不宜直接测量,本文将采用滑模变结构观测方法实现其重构[17-18]。滑模观测器(sliding mode observer,SMO)具有很强的鲁棒性、自适应性,适用于非线性、不确定性的系统状态观测,目前研究多集中在电磁电机位置观测、飞行器状态观测[19-21]等。
本文将在分析合成行波与电机运行特性关联基础上,建立TWUSM两相振动模态的非线性SMO,分析系统稳定性和参数鲁棒性;并根据观测的振动模态,设计协同控制算法,调节两相电压,进而改善电机运行特性。最后通过实验验证该方法的有效性。
1 TWUSM基本方程及转矩特性分析
TWUSM的工作原理:通过给空间正交的两相压电振子施加两相互差π/2的高频正弦电压激发两相振动模态,进而在定子中合成行波并驱使定子表面质点的椭圆运动,从而对以一定预压力压在定子表面的转子产生驱动摩擦。
TWUSM两相电压u=[uA,uB]T、电流i=[iA,iB]T与激发的振动模态w=[wA,wB]T间满足以下机电耦合方程:
(1)
(2)
其中:Ms=diag{msA,msB}、Ds=diag{dsA,dsB}以及Cs=diag{csA,csB}分别代表两相模态质量、模态阻尼和模态刚度;Rd=diag{RdA,RdB}、Cd=diag{CdA,CdB}分别为两相压电振子的介电损耗电阻和静态电容;FC=[fCA,fCB]T为由于接触作用产生的两相界面接触模态力;Θ为机电耦合系数。
定子中合成的行波可以表示为
(3)

近似地,定子通过接触摩擦产生的转矩可表示为理想转速vid与实际转速v之差的非线性函数[10],即
Te=fT(vid-v)=fT(φθωWsinkθT-v)。
(4)

实际中,由于电机材料、装配等带来的电机两相参数非对称性以及受运行温度、磨损引起参数时变,即使施加的两相电压等幅正交,所产生的行波也将存在幅值和相位的波动,进而导致驱动转矩的波动以及摩擦损耗的增加,影响控制性能。所以,针对两相振动模态的观测和协调控制是十分必要的。
2 振动模态非线性滑模观测器设计
2.1 振动模态滑模观测器
根据TWUSM机电耦合方程(1),由于A、B两相表达式一致,不失一般性,将其一相方程重新写为
(5)
其中,界面接触模态力fC由于受电机实际运行中作用力影响,为系统不可测的非线性部分。


(6)

(7)
根据TWUSM的运行特性可知,该未知函数有界,且满足
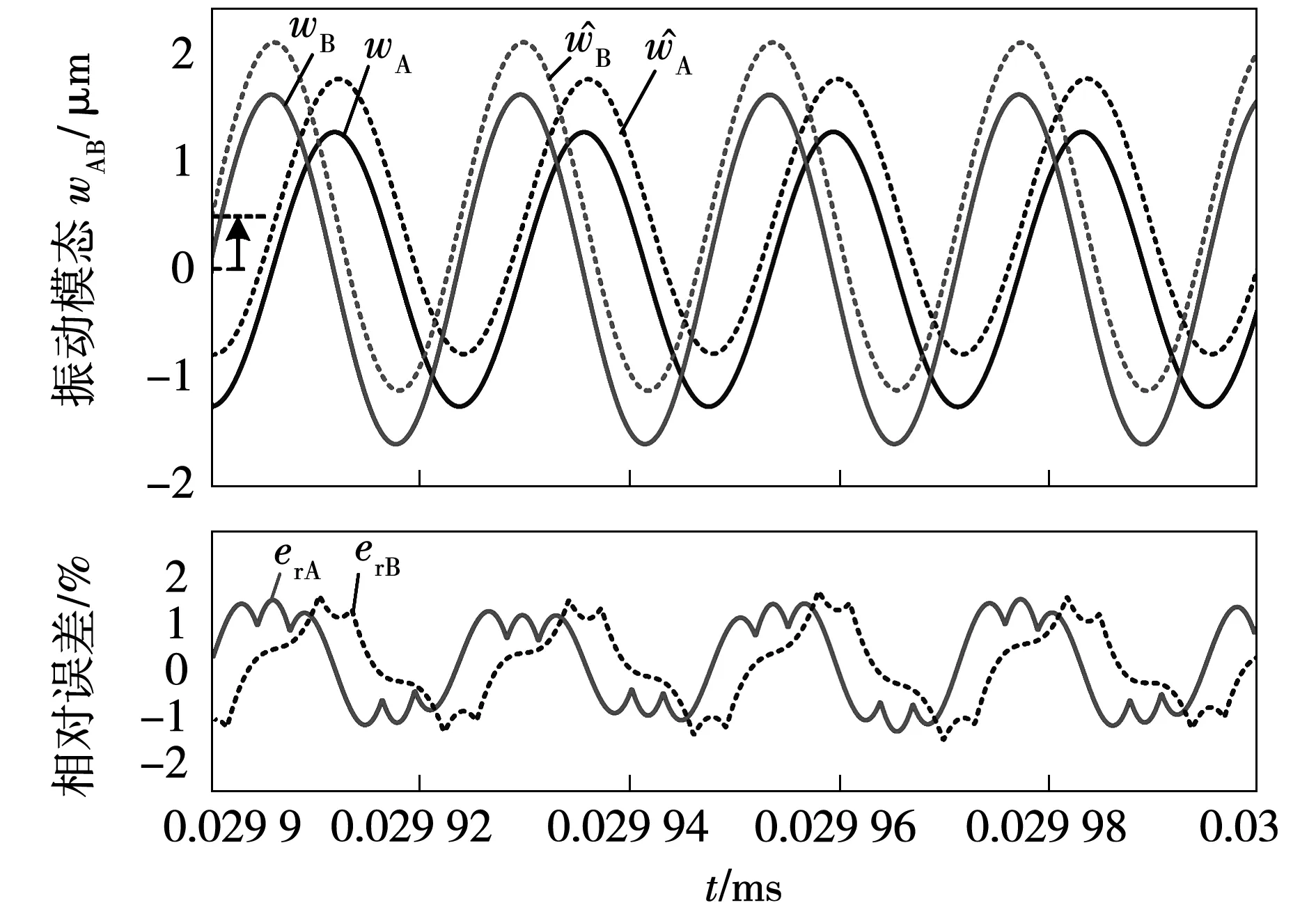
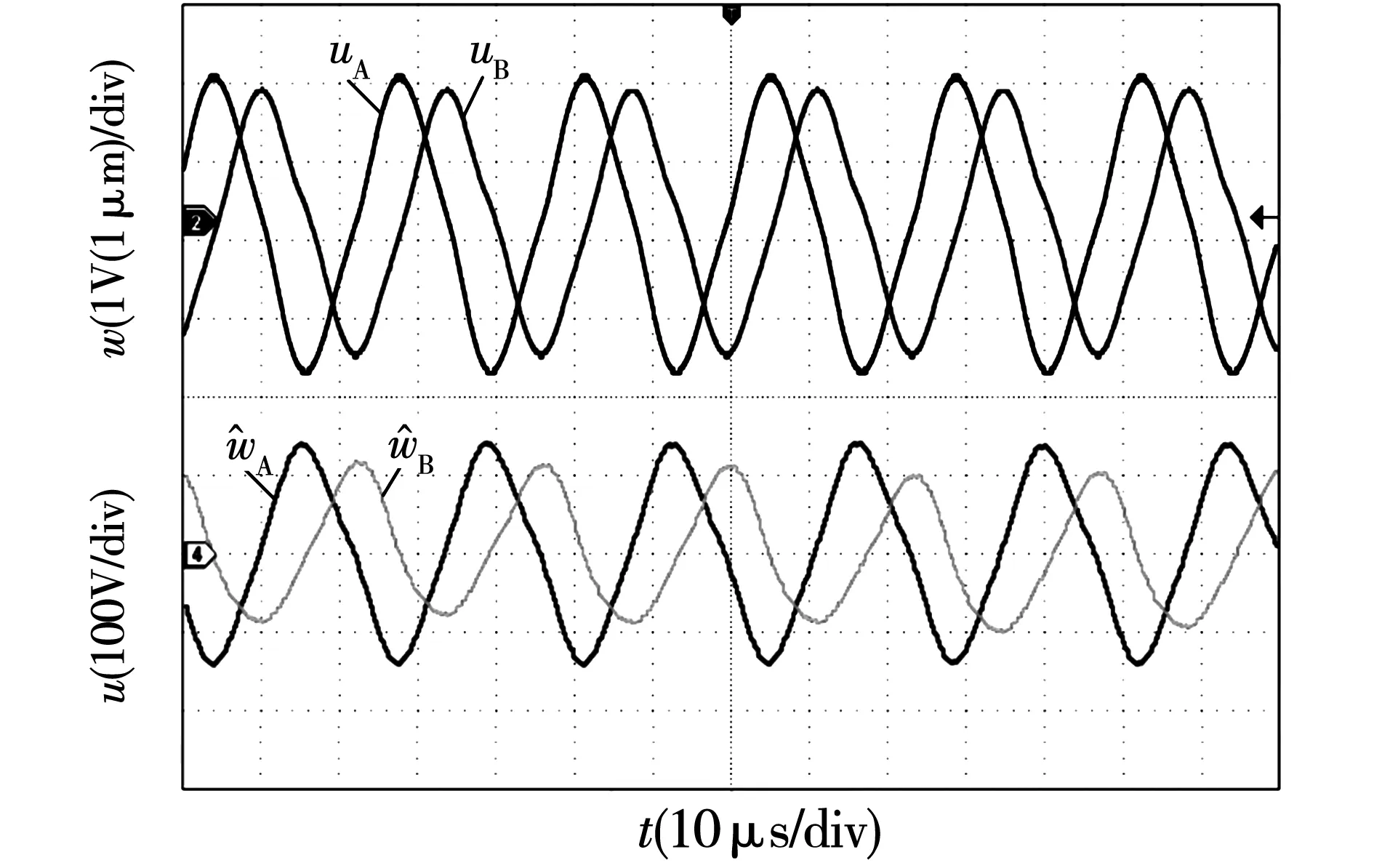
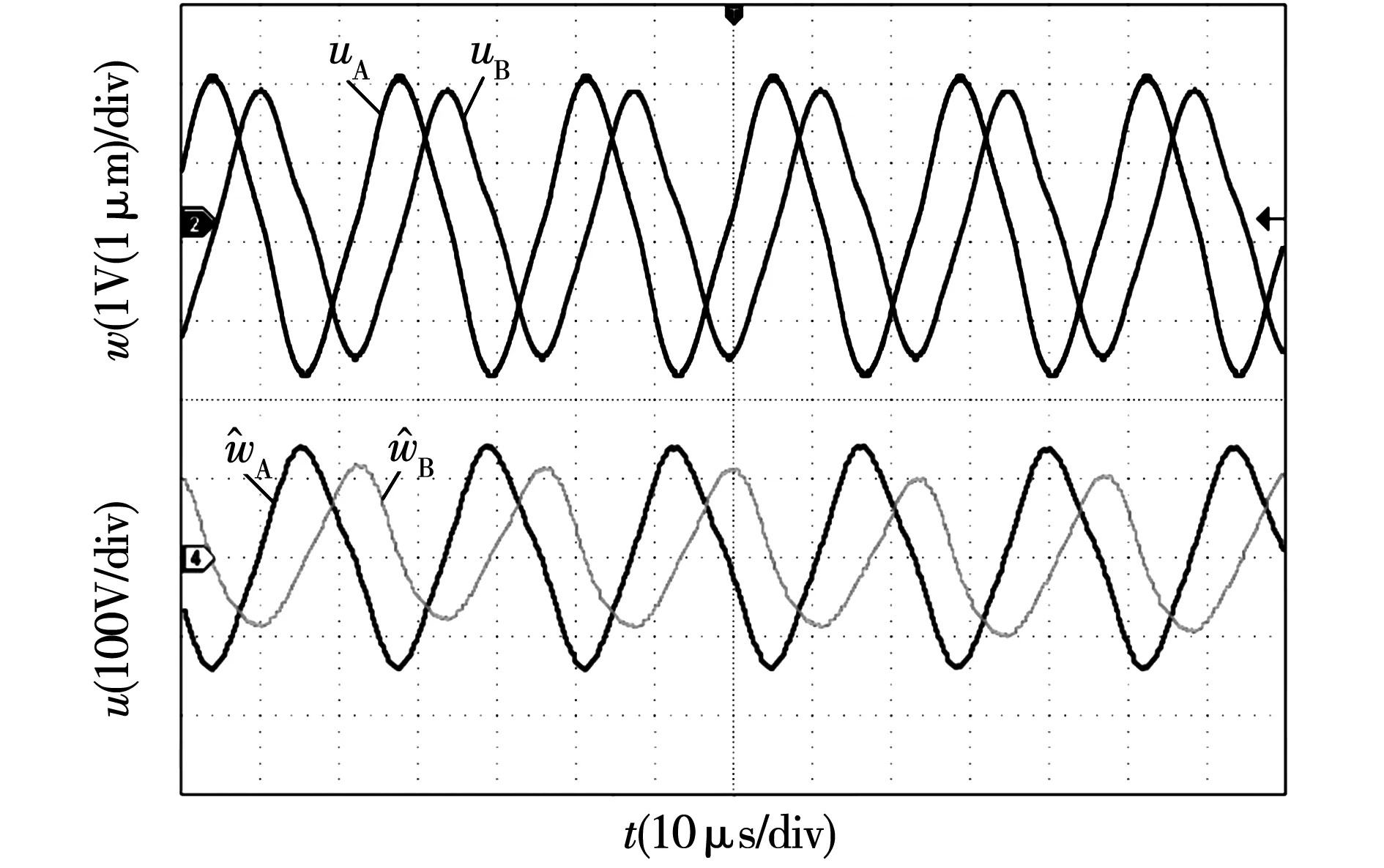
h(t,x,u)=Bξ(t,x,u),|ξ(t,x,u)| (8) 由于系统中存在非线性的未知项,根据Walcott-Zak鲁棒滑模观测器的设计方法,设计振动模态的非线性观测器为 (9) (10) 观测器的控制输入为 (11) 根据系统特征及观测器稳定性条件,对TWUSM非线性SMO的参数进行设计,得到 设Lyapunov函数 V(e)=eTPe, (12) 则有 -eTQe-ρ|fCe|-ξfCe≤ -eTQe-|fCe|(ρ-|ξ|)≤ -eTQe-|fCe|(ρ-D)。 (13) 其中第一项,Q虽然为半正定矩阵,但满足该项沿任一轨迹不恒为零,故其平衡点为原点。第二项由于ρ≥D+η,η为正实数,也必然小于等于0,所以 (14) 等号仅在e=0时成立,于是可以证明,观测器稳定收敛,并且对参数的扰动具有鲁棒性。 根据电流方程(2),亦将其一相方程按状态变量电压u重新写为 (15) (16) 其中,k1>0,0 (17) 则其一阶导数 (18) (19) 结合Lyapunov函数,可以得到 (20) 则系统不仅是全局范围内渐进稳定,而且是有限时间稳定,稳定时间依赖于s的初值s0,即 (21) (22) 对于上述观测器中,均可采用sigmoid函数或者双曲正切函数代换符号函数sgn(·),以降低观测过程中的抖振。 针对TWUSM全桥驱动器,提出了一种适用于FPGA的两相振动模态协调控制的实现方法,控制结构如图1所示。 图1 基于非线性SMO的振动模态协调控制图Fig.1 Nonlinear SMO based vibration mode coordination control block (23) 这样,通过计算获得每相每次存储的N个点中的峰值wAm和wBm及其对应的位置idxA、idxB分别对幅值和相位进行协调控制。 对于幅值,比较观测得到的两相振动模态的峰值wAm和wBm,利用PI控制下一定范围内协同调节两相方波电压占空比dA、dB。两相的占空比的初值选取方波能量利用率最大时对应的占空比37.1%[22],调节范围按能量利用率设置为25%~50%。 对于相位的调节,则以A相为参考,调节B相相位。根据峰值所对应的位置idxA和idxB,可计算出振动模态的相位差 (24) 通过PI调节器调节B相电压相位,使φ满足±π/2(符号“±”表明电机正反转需求的相位关系)。 依据上述两相振动模态的幅值和相位的协同调节,则可实现两相振动模态的等幅正交,降低合成行波的波动,从而减小转矩脉动及多余的摩擦损耗。 进一步地,为实现TWUSM的精密伺服控制,在以上述振动模态的协调控制作为内环控制的基础上,可结合以频率调节和直流母线电压补偿的控制形式来完成外环速度/位置精密伺服控制。 仿真和实验中所用参数均取自一台GTUSM-60-R型TWUSM及自制电机全桥驱动控制器,电机部分参数见表1。 表1 行波型超声电机参数 在MATLAB/Simulink中建立TWUSM及其全桥驱动器仿真模型。对照实际电机驱动状态,设置全桥电路输出的方波电压频率为42.08 kHz,占空比37.1%,幅值70 V,A相电压滞后B相π/2,空载运行。按本文方法建立非线性SMO观测振动模态。 图2 起动初期两相振动模态观测曲线Fig.2 Observation curves of two-phase vibration modes at the beginning 图3 稳态两相振动模态观测曲线Fig.3 Observation curves of two-phase vibration modes at steady state 为验证该非线性SMO系统的鲁棒性,当参数存在20%的扰动时,重新进行上述仿真。为了快速检验,设置A相参数增加20%,B相减少20%,得到的仿真结果如图3所示。图中,两相实际振动模态曲线为实线,观测曲线为虚线,为便于观察,观测曲线同样向上平移0.5 μm。图中可以看出,两组曲线与未改变参数前,几乎没有变化,其观测值的相对误差依然不超过2%。 图4 观测器参数扰动下两相振动模态观测曲线Fig.4 Observation curves of two-phase vibration modes under disturbance of parameters 通过上所述仿真结果说明,本文所提出的TWUSM振动模态非线性SMO能够快速、准确地观测振动模态,并具有参数鲁棒性,从而为优化电机控制奠定基础。 建立协调控制仿真模型,对所提出的SMO两相振动模态协调控制方法进行仿真验证。 首先,未加入协调控制,仿真参数设置与上一小节相同,得到稳态时的两相电压、两相振动模态以及转速、转矩的曲线,如图5所示。 图5(a)最上部分给出了两相电压曲线,由于全桥驱动电路两相谐振电感以及电机两相静态电容参数并不完全相同,即使方波电压的幅值、占空比设置相同,通过LC谐振得到的机端两相电压也不尽相同。其中A相电压幅值为185.58 V,B相电压峰峰值为171.19 V。下边两幅图分别给出了两相电压幅值的偏差及两相电压的相位差(依算法按周期统计),其中,平均幅值偏差为14.1748 V,平均相位差为-0.493 8π。可见两相电压幅值接近,相位差基本为-π/2。 图5 未加入协调控制TWUSM运行特性曲线Fig.5 TWUSM running characteristic curves without coordination control 在图5(a)电压作用下,仿真得到两相振动模态曲线如图5(b)最上部分所示,其中,两相振动模态的幅值分别为:wA=1.251 4 μm,wB=1.593 9 μm。其幅值存在较大偏差,平均幅值偏差为-0.342 3 μm;A相相对于B相的相位差平均值为-0.507 2π rad,接近-π/2。引起振动模态幅值不相等的主要原因即电机两相结构参数不对等。 由于两相振动模态幅值存在偏差,将引起转矩脉动和转速波动,如图5(c)所示。空载运行下,电机输出转矩平均值为0,但是其转矩脉动ΔT达到0.84 N·m,相对于该型号电机最大输出转矩1.6 N·m,其脉动大。由此也带来了转速的波动:转速均值约85 r/min,转速的波动Δn约在1.03 r/min左右,虽然传统意义上该转速波动不大,但对于超声电机低速、精密运动控制,还是将导致控制精度下降等问题。 采用本文所提出的振动模态协调控制策略,构建振动模态的幅值和相位闭环协调控制。在与上文相同的频率和方波电压幅值的条件下,两相方波电压的占空比分别经控制调节为A相46.2%、B相28.0%,相位差为-0.49π。稳态下,两相电压、两相振动模态以及转速、转矩的仿真曲线分别如图6所示。 调节后,机端两相电压发生了较大变化,如图6(a)所示,两相电压的幅值分别为:A相201.25 V,B相138.09 V,幅值偏差64.42 V,相位差则变化为-0.485 8π。而两相振动模态,如图6(b)所示,呈现出等幅正交的状态,两相振动模态的幅值分别为1.359 8 μm和1.361 7 μm,平均幅值偏差仅3.730 1 nm,相对于幅值不到0.28%。两相振动模态的平均相位差则-0.493 4π,更接近于-π/2。 通过两相振动模态的调节,电机输出的转速转矩特性得到改善。如图6(c)所示,由于电机空载,稳态转矩的平均值为0,转矩脉动ΔT降至0.064 0 N·m,为未调节时的转矩脉动的7.6%,可见转矩脉动得到显著降低。与此同时,速度开环转速均值约83 r/min,转速波动Δn降为0.268 2 r/min,性能亦得到了显著改善。 综上,由协调控制仿真结果可知,基于所提出的非线性SMO观测振动模态,协调控制两相振动模态使之等幅正交,可有效改善电机输出转矩和转速的性能,进一步提升TWUSM在精密运动系统中的精密性和稳定性。 采用如图7所示的基于FPGA的TWUSM全桥驱动控制实验平台进行实验验证,其中,TWUSM同轴连接扭矩传感器和编码器用于转矩和转速的测量,末端连接磁粉制动器用于加载。另外,实验中将FPGA控制器中所观测到的振动模态通过DAC输出,从而便于直接观测。 图6 加入协调控制TWUSM运行特性曲线Fig.6 TWUSM running characteristic curves with coordination control 未加协调控制时,全桥驱动器输出方波电压占空比37.1%,频率42 kHz,磁粉制动器未加载(空载)。稳定运行,通过编码器获得电机转速约为89 r/min,电机电压和观测振动模态波形如图8所示。其中,A、B两相电压幅值分别为190 V和172 V,观测到的振动模态幅值分别为1.43 μm及1.10 μm,相位差0.538 9π。两相振动模态幅值存在有0.33 μm偏差。 图7 基于FPGA的TWUSM全桥驱动控制实验平台Fig.7 FPGA-based full-bridge drive control platform of TWUSM 图8 未加入协调控制电压、振动模态曲线Fig.8 Voltage and vibration modes curves without coordination control 加入协调控制后,两相占空比经控制调整为A相30%、B相46%,空载下转速约为87 r/min,电压及观测振动模态波形如图9所示。其中,两相电压幅值分别调节为130 V和203 V,获得观测的振动模态幅值分别为1.35 μm和1.34 μm,相位差为0.494 4π,实现了模态的等幅正交。 上述两组实验所对应的轴上输出转矩曲线通过波形记忆功同时显示,如图10所示,T1为未加协调控制的转矩,T2为加入协调控制后的转矩,由于均在空载下,其转矩平均值近似为0。在图中可以看出,T2转矩脉动约为0.4 N·m,而T1的转矩脉动达到1.4 N·m,明显大于T2的转矩脉动。 图9 加入协调控制电压、振动模态曲线Fig.9 Voltage and vibration modes curves with coordination control 图10 输出转矩对比曲线Fig.10 Output torque comparison 对比上述实验结果,如图11所示,未引入协调控制而按等占空比进行控制,电机两相电压接近,但是受电机参数不对称的影响,激发出的两相振动模态存在较大偏差,其输出转矩亦存在较大脉动;而利用非线性SMO针对电机的两相振动模态实施协调控制,使其振动模态近乎等幅正交,可有效减小电机输出的转矩脉动。上述实验也间接证明了所观测得到的振动模态的正确性。 图11 实验结果对比Fig.11 Comparison of experiment results 本文着眼于TWUSM产生驱动的振动本质,在分析了振动模态对输出转矩的影响上,研究了TWUSM振动模态非线性SMO及其协调控制策略。首先,针对不易直接测量的振动模态,在对振动模态一阶导数估计的基础上构建了一种非线性SMO设计方法,利用Lyapunov法对其稳定性以和参数鲁棒性给予证明。其次,在非线性SMO的基础上,提出了一种面向全桥驱动器的两相模态协调控制的优化策略。最后,对所提出的非线性SMO的准确性和鲁棒性进行了仿真验证,并针对电机两相振动模态的协调优化控制行了对比仿真和实验。结果表明,基于所提出的非线性SMO准确获得电机振动模态,并协调控制使其等幅正交,能有效减小电机输转矩脉动,提高电机运行性能。





2.2 振动模态一阶导数的估计



3 基于SMO的振动模态协调控制


4 仿真及实验
4.1 电机参数
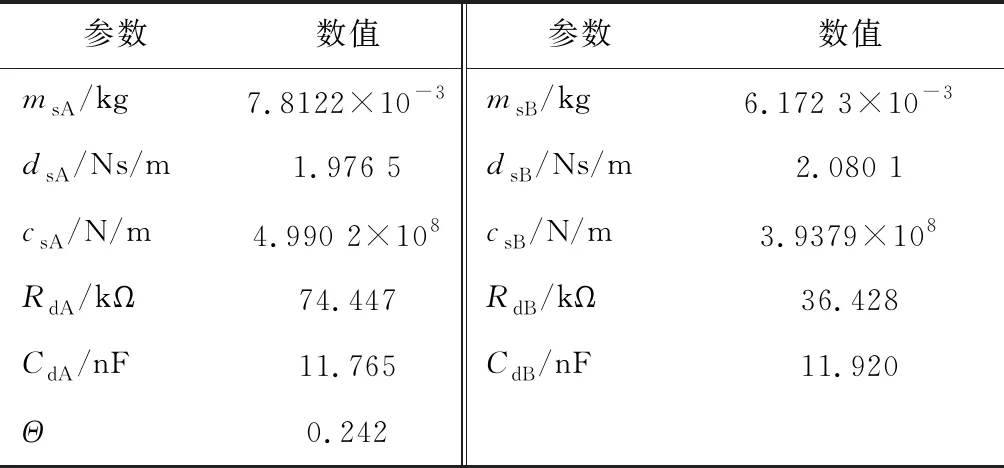
4.2 振动模态观测器仿真


4.3 基于SMO的两相振动模态协同控制仿真

4.4 振动模态非线性SMO及协调控制实验验证




5 结 论
