涡扇发动机自适应加减速控制研究
2021-05-18王曦
王 曦
(北京航空航天大学能源与动力工程学院,北京100191)
0 引言
飞机的机动敏捷性需要航空发动机的快速推力变化才能实现,涡扇发动机过渡态性能是评估高性能发动机的1项重要指标。在慢车以上的过渡态下,加减速控制包括开环油气比控制和闭环Ndot 控制2种方法[1-3]。在20 世纪80 年代前,应用于航空发动机液压机械控制的加减速控制普遍采用带有主燃油流量限制的开环油气比供油规律[3-4];在80 年代以后,全权限数字电子控制器(Full Authority Digital Elec⁃tronic Control,FADEC)逐步取代了液压机械控制器,在现代高性能航空发动机中发挥了重要的支撑作用[5]。针对液压机械控制改进数字电子控制的过渡态控制设计问题,苗浩洁等[6]提出一种不含温度参数的油气比加减速控制规律,可避免温度传感器动态响应滞后而影响发动机加减速性能的问题;针对FADEC 用过渡态控制的设计问题,孔祥兴等[7]提出一种外推加减速开环油气比供油规律的设计方法。由于开环油气比控制规律存在外界环境适用性较差的问题,为了保证发动机在空中起动的成功率,F100 发动机采用闭环Ndot 控制取代了开环油气比控制,在空中停车或熄火的情况下,在燃烧室燃油被成功点燃之前采用开环供油方式,一旦确认高压涡轮后温度传感信号明显上升,燃油供油方式和压气机放气控制立刻进入闭环控制方式,其中,闭环变燃油控制采用受高压涡轮后温度超温限制的N2dot =f(PLA,P2,T2,Ma)的控制策略[8]。转子加速度的过渡态控制律已应用于先进航空发动机控制系统的设计中,以保证同一型号发动机加减速性能的一致性,而不随发动机加工制造误差、材料差异及部件性能退化等因素变化。针对双转子涡扇民用发动机,党伟等[9-10]提出一种N-dot过渡态控制律的设计方法,基于差分进化算法,设计了相应闭环N-dot的PI控制律,采用增益调度计划构建了全飞行包线内的N-dot 过渡态控制律。但是,闭环控制反馈回路中需要转速的微分信号,所带来的测量噪声问题给闭环控制在工程上的应用带来一定的难度[2];针对这一问题,杨舒柏等[11]提出一种不采集转速微分信号的间接Ndot 闭环控制方法,并对比了直接Ndot闭环控制和间接Ndot闭环控制的优缺点。
煤炭开采对生态环境的污染极为严重,因此,国家必须要支持技术、工艺先进的煤炭开采企业,对于技术落后的企业必须要坚决关停。国家还需要大力扶持环保型的企业,通过优惠政策推进环保企业的发展,将不合理不合法的煤炭开采企业从市场中清退。此外,煤炭开采企业更要坚持开发与治理并重的原则,坚持走环境的可持续发展道路,只有这样煤炭开采领域的发展才能够继续长久的走绿色健康的发展路线。
近年来,多变量控制在理论方面已得到了长足发展[3-4]。其中,基于内点法求解线性矩阵不等式(Lin⁃ear matrix inequality-LMI)问题已成为设计多变量控制律的一种有效手段,为了实现对涡扇发动机高精准稳态控制,在静态输出反馈渐近稳定条件的基础上考虑控制系统的鲁棒稳定裕度。崔颖等[12]提出了一种多变量控制系统闭环极点配置圆的线性矩阵不等式LMI设计方法;针对涡扇发动机过渡态多变量控制设计难的问题,缪柯强等[13]基于增益调度可作为非线性动态控制策略这一基本原理,将稳态多变量控制规律的LMI 方法推广到涡扇发动机过渡态主控回路闭环控制的设计中,提出一种过渡态主控回路闭环控制律的优化设计方法。
自适应控制的研究始于20 世纪50 年代,源自于高稳定性和高动态性能的飞机自动驾驶装置系统设计。由于自适应控制能够对系统中存在的不确定性实施有效控制,近年来发展十分迅速[14-15],可以广义描述为基于可测的被控对象输出参数在线实时调整控制器的增益设计参数以适应系统不确定性的变化,其中可调控制器参数称为自适应参数,而将1 组用数学微分方程描述的调整机制称为自适应律。显然,自适应控制是被控对象动态特性存在不确定性的一种更为灵活的控制方法。王浩楠等[16]以飞机纵向运动的三自由度动态系统为背景,研究了以油门杆角度和升降舵偏转角为控制输入、以飞行速度和飞行高度为被控输出的6 状态三自由度飞机多变量自适应控制问题,仿真结果表明多变量自适应控制方法有助于提升控制系统的动态性能。
在学习高中数学知识的时候,一定水平的数学思维能力是相当有必要的,基于此,作为高中生的我们才有能力开展深一步的知识探究活动,以深化数学知识认知。那么,在平时数学学习过程中,我们就可以积极参与到具体的小组合作探讨学习活动当中,积极阐述自己的知识理解,同时也仔细聆听其他同学的不同想法,从而在有效启发下进行延伸性思考,最终在不断丰富知识学识的同时促使自己的数学思维能力实现大幅度拓展,为自身综合数学能力获得提供有效助力。
显然,涡扇发动机在宽广的飞行包线范围内工作时,其表现的动态特性变化很大。本文针对涡扇发动机加减速过程特性参数变化大的不确定系统,研究带执行机构的涡扇发动机自适应加减速伺服控制的设计方法,并考虑抑制自适应加减速过程中的参数漂移问题。
1 不确定系统的自适应伺服控制描述
定义状态跟踪误差向量为
既然皇帝与储君都要学习青齐学术,那么宗室贵戚自然也要跟风仿效。史书中不乏宗王为子弟延请青齐学者为师之例。任城王元澄之子元顺,“九岁师事乐安陈丰,初书王羲之《小学篇》数千言”,“〔年〕十六,通《杜氏春秋》,恒集门生,讨论同异”。北魏青州、沧州皆有乐安郡,陈丰既然讲授《杜氏春秋》,显然是青州乐安人。据《元顺墓志》,元顺生于太和十一年,师事陈丰则在太和十九年。此外,元澄对曾“受业齐土”的张普惠另眼相看,“重其学业,为其声价,仆射李冲曾至澄处,见普惠言论,亦善之”。孝明帝时,仆射元钦“曾托青州人高僧寿为子求师”,所求自是青州学者。
上述推论表明,对于任意的有界指令ycmd(t),在自适应律式(29)及自适应控制式(23)作用下,当t→∞时,式(17)表示的闭环系统输出y能够全局渐进跟踪参考模型输出yref,同时yref以有界误差跟踪任意的外部有界指令ycmd(t),因此,y也能以有界误差跟踪任意的外部有界指令ycmd(t),实现了MIMO 任意指令的跟踪。
为使控制系统具有伺服跟踪和对扰动信号抑制的能力,期望在控制回路中内嵌积分环节,以实现闭环系统的伺服跟踪鲁棒性能,为此,定义跟踪误差向量为

并考虑误差的积分

设自适应律为

其中,增广系统Σ2的系数矩阵分别为
为 使 (A,BΛ) 可 控 ,要 求 (Ap,BpΛ) 可 控 ,且
因此,涡扇发动机MIMO不确定系统Σ1的自适应内模控制设计目标为:对于MIMO 不确定系统Σ2,在存在不确定性集合{ }Λ,Θ的条件下,采用全状态反馈,使得被控输出向量y能够伺服跟踪任意有界的时变指令向量ycmd(t)。
2 参考模型设计
对于系统 Σ2,令Λ=Ip×p,Θ= 0s×p,可得 Σ2的基准动态系统Σ3为

对 于 系 统 Σ3,设ycmd为 常 量 指 令 ,以为状态向量,以v=u∈Rp为输入向量,构建系统Σ4为

系统Σ4在状态反馈
钼精矿来自洛钼集团,主要指标:Mo54.5%,Fe 1.31%,SiO2 2.13%,Cu 0.13%,P 0.015%,粒度(D50)19.53%;36%HCl(AR洛阳昊华化学试剂有限公司);复合助溶剂Co-NC、复合含氟化合物、去离子水均自制。

的作用下,考虑线性二次型性能指标最小化的调节器设计问题,即

式中:Q=QT≥0,为对称半正定加权矩阵,Q对状态向量z进行性能约束;R=RT>0,为对称正定加权矩阵,R对输入向量v进行性能约束,则系统Σ4的最优LQR解为

式中:Kz为系统Σ4的全状态反馈增益矩阵

则状态跟踪误差动态方程为

对式(8)积分,则Σ3的线性二次调节器LQR的解为

则Σ3在状态反馈
图9a显示,在海州湾有中尺度反气旋环流,其反气旋气流维持着与海风锋锋面相交的海风。在长江口,是辐合线及辐合中心,等温线与海岸线基本平行。海风自海面登陆,在内陆数十千米处发生显著辐合。在该类海风锋过程中,海陆温差非常明显,达8 ℃以上。海上的最大风速不超过3.5 m·s-1,说明热力环流的作用占主导作用。江苏徐州和安徽北部是鞍形场,并具有变形场锋生。因此在江苏与安徽境内具有多个锋面系统,并且从东西南北方向汇集或相遇,为海风锋伴随不稳定环境以及激发强对流提供了条件。

的作用下,其闭环系统的动态模型为

式中:Aref为Hurwitz矩阵,Aref=(A-BKx);Cref=C。
桃娭毑顿时吓得脸色惨白,死活也不让儿子去部队了。眼看接兵的日子一日临近一日,大队和公社干部轮番做工作也无济于事,又惊动了县里武装部,武装部部长来了,说要抓走香娭毑,判她的刑。乡党们都来做桃娭毑的工作,说香娭毑本是一番好心,并无恶意,不知者不为怪云云。好话讲了几皮箩,才把桃娭毑劝解过来。香娭毑自知说错了话,理亏,吓得一直不敢出门,也没人上她家去呷茶。
3 不确定系统的自适应控制律
设系统Σ2的控制输入由基准控制ub和自适应控制uad2部分组成,即
实验组是在常规治疗的基础上加用还原型谷胧甘肽(上海复旦复华药业有限公司,国药准字H20031265),1.2g还原型谷胧甘肽溶于250 ml浓度为5%的葡萄糖溶液中,静脉滴注,1次/d[3]。以上用药均持续2w。

则系统Σ2等价为

其中


设

设带执行机构的涡扇发动机多输入多输出参数匹配不确定系统Σ1可描述为

式中:P为下述代数Riccati方程的惟一对称正定解。

构造Lyapunov二次候选函数

式中:自适应参数速率加权矩阵为Γ=ΓT>0,Γ∈R(p+s)×(p+s),并定义为下述代数Lyapunov方程的惟一正定对称矩阵解

式中:Qref=QTref>0,为设计过程中根据动态性能要求需要选择的正定对称阵。
对系统Σ1增广,定义增广系统Σ2的状态向量为则Σ2可表示为

则

令ycmd(t)∈Rp为被控输出向量y∈Rp的跟踪有界指令向量,涡扇发动机多输入多输出MIMO 不确定系统Σ1的自适应控制设计目标可描述为:在系统存在不确定性集合{Λ,Θ} 的条件下,采用全状态反馈,使被控输出向量y能够伺服跟踪任意有界的时变指令向量ycmd(t)。
此外,对于延伸组分除只按碳数进行归类外(处理方式1),一般还将苯、甲苯、环己烷、甲基环己烷等组分进行单独定量分析(处理方式2),两个实际天然气样品按照数据处理方式2获得的结果见表2。
进一步对自适应速率权矩阵Γ进行分块

则
25-(OH)D3可抑制肾素-血管紧张素-醛固酮系统,抑制血管平滑肌增殖,当25-(OH)D3低水平时可引起心室肥厚、血压升高、心功能恶化、心力衰竭等,因此机体25-(OH)D3缺乏与多种心血管疾病的发生密切相关[9]。本研究中并发恶性心律失常患者的血清25-(OH)D3水平低于未并发恶性心律失常患者。这一结果提示,25-(OH)D3降低会增加AMI患者并发恶性心律失常的概率。

则
本课题采用GC-MS法和UV254测定,对混凝-加核絮凝组合工艺处理前后麦草浆制浆造纸废水中污染物的成分进行了分析研究,并利用活性污泥法对组合工艺处理后的废水是否可以利用生物法继续处理做了验证。
当MIMO 不确定系统中存在噪声ξ时,上述自适应控制系统将会产生参数漂移现象,其被控对象模型可表示为
式中:Ap∈Rn×n、Bp∈Rn×p、Cp∈Rp×n,为已知的常量矩阵;Λ∈Rp×p,为未知的具有正对角元素的常量对角矩阵,用于描述控制系统回路的潜在缺陷;系统状态向量xp∈Rn全部可测;控制输入向量u∈Rp;被控输出向量y∈Rp全部可测;f(xp):Rn→Rp,为与状态相关的参数匹配不确定性向量;Θ∈Rs×p,为未知的不确定性常量参数矩阵;Φ(xp)∈Rs,为s维已知的局部Lip⁃schitz 连续的有界回归函数向量;系统不确定性集合为{Λ,Θ} ,(Ap,BpΛ) 可 控 ;由 于 不 确 定 性f(xp)=ΘTΦ(xp)出现在控制输入矩阵B的作用范围内,不确定性f(xp)=ΘTΦ(xp)称为参数匹配不确定性;矩阵B的列空间由所有Bu的乘积构成;在理想自适应情况下,控制输入u能够完全抵消参数匹配不确定性。

如果信噪比较小,自适应控制会改变控制策略,试图通过自适应律来减速噪声,而不是继续跟踪误差,导致自适应控制律对外界进入系统的噪声不断进行积分,跟踪误差将会逐渐放大,产生了跟踪参数的漂移。为了避免这一现象的发生,需要对自适应律进行修正,采用变阻尼σ-e修正方法,则变阻尼修正自适应律为

在上述自适应律修正项中引入1 个σ常数的阻尼,以限制自适应参数不超出其边界,但σ阻尼修正无法实现渐进跟踪特性。为此,引入误差e的修正,以跟踪误差范数的速率来减小定常σ阻尼的作用,使自适应律的修正能够实现变阻尼的效果,当误差e趋于零时,阻尼作用也随之消失,恢复了参考模型自适应控制的理想渐进跟踪特性,具有鲁棒抗噪声干扰的特性。
4 涡扇发动机自适应加减速控制仿真
在上述推论中,采用自适应控制能够实现被控对象的输出y伺服跟踪任意的外部有界指令ycmd(t),由于ycmd(t)是任意的,这一结论表明适用于涡扇发动机的加减速过渡态控制。设带执行机构的双转子涡扇发动机归一化状态空间不确定模型为

其中
列车自组织D2D通信,首要问题是列车发现过程中的资源池分配问题,在基站工作正常的情况下,可以考虑基站周期性地分配资源池用于列车识别。如果基站无法正常工作,可以使用一种为区域指定资源的方式进行资源池的分配,将资源池与线路上某个区域进行一对一绑定,并将对应关系表保存在每一列列车中;当列车进入某个区域并需要自组织的列车识别与通信时候,列车依据关系表选择对应的D2D通信的资源池。
采用上述方法设计的基准动态系统的状态反馈控制律为

其中

参考模型为
参考模型的单位阶跃响应如图1 所示(采用无量纲化处理)。调节时间约2.1 s,无超调,无静差。参考模型的Bode 如图2 所示。谐振峰值Mp=1,带宽ωB=1.5 rad/s,相角穿越-900的角频率ω-900=1.84 rad/s。
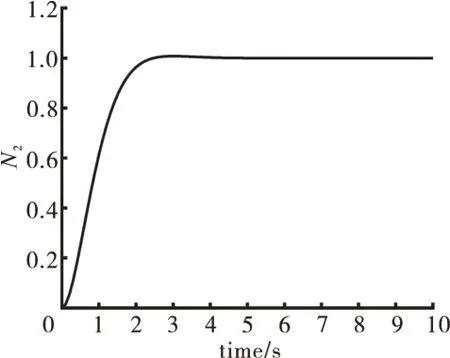
图1 参考模型的单位阶跃响应
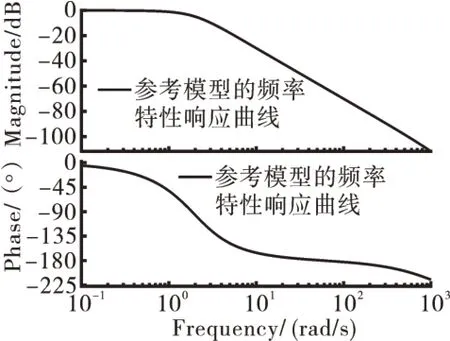
图2 Bode
设计变阻尼σ-e修正的自适应律


给定Qref= diag(0.1,0.1,0.1,1),得

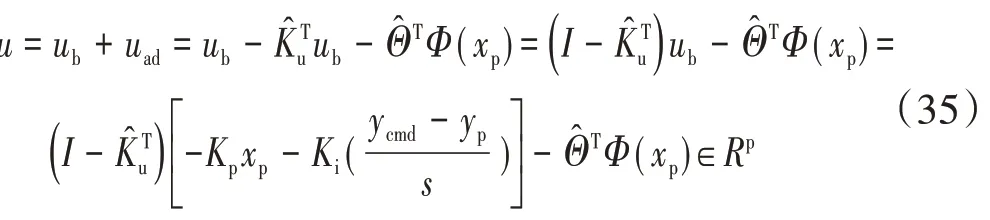
抑制不确定性的自适应控制为
可得涡扇发动机自适应加减速控制律为
构建双转子涡扇发动机自适应加减速控制系统,加入零均值白噪声的干扰进行加减速性能仿真验证,仿真时间为100 s。假设加减速过程中高压转子转速加减速指令信号、模型参考指令和被控对象响应曲线如图3 所示(采用无量纲化处理),图中包含了快速加减速和慢速加减速的多种组合情况。从图中可见,在加减速过程中尽管发动机的动态特性变化很大,高压转子转速也能够自适应加减速过程中发动机动态特性的变化而进行加减速控制参数的适应性调节,高压转子转速响应曲线非常接近参考指令曲线,2 条曲线几乎重合,在第20~30 s 局部放大图形曲线如图4 所示(采用无量纲化处理)。
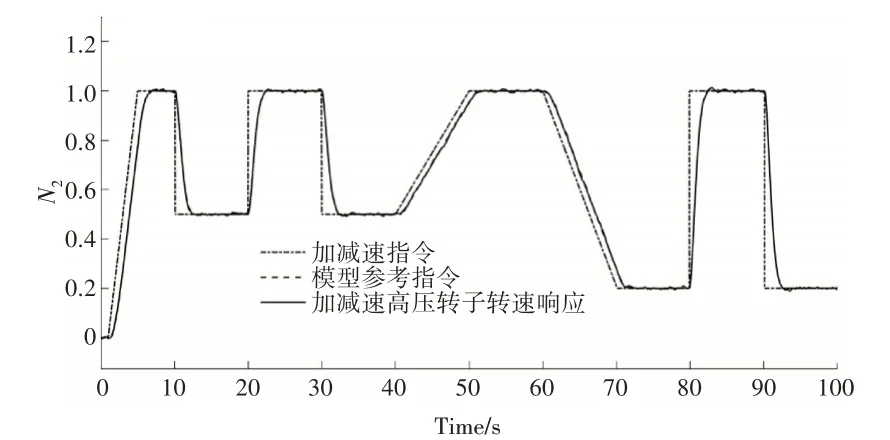
图3 高压转子转速指令信号、模型参考指令曲线和跟踪响应曲线
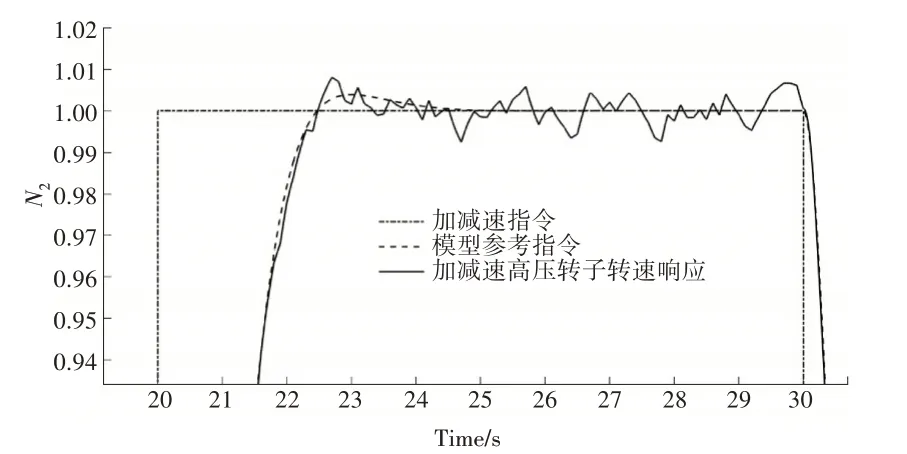
图4 在第20~30 s局部放大高压转子转速指令、模型参考、响应曲线
对应的自适应参数响应曲线如图5 所示(采用无量纲化处理)。从图中可见,在系统中存在白噪声干扰的情况下,自适应参数被限制在±0.003 的范围内,没有出现参数漂移现象。
在对礼仪基本理论和基本知识进行课堂讲授时,强调在课堂教学中积极调动学生学习的积极性,开展课堂讨论,培养学生的思维和分析问题的能力。例如,在“礼仪内涵”的教学过程中,先利用一些礼仪知识自测题引导学生进行思考,学生给出自己的答案并进行讨论,然后老师对错误观点进行纠正,并让学生自己通过对比讲出其中缘由,能够让学生对知识点的印象更深刻。
加减速过程中对应的控制器输出曲线如图6 所示(采用无量纲化处理)。从图中可见,在加减速过程中燃油流量未出现大幅超调和下垂。

图5 自适应参数响应曲线
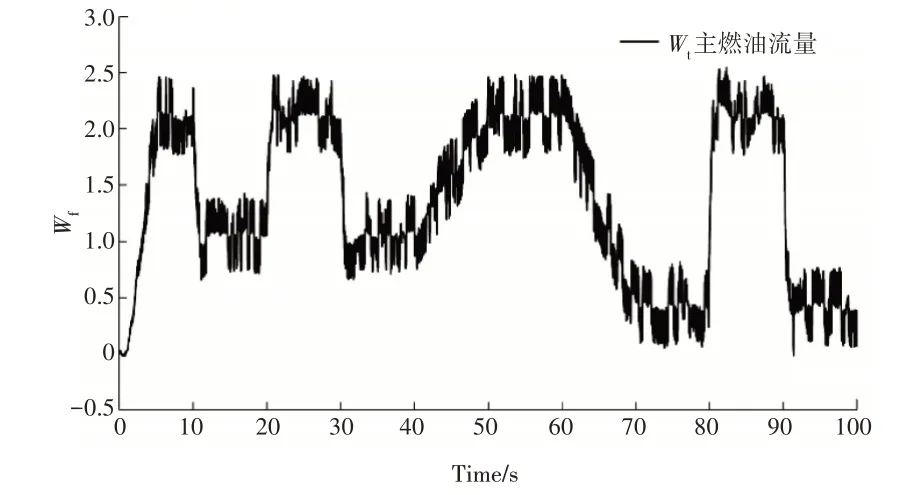
图6 控制器输出曲线
5 结论
本文针对带执行机构的涡扇发动机参数匹配不确定系统,研究了涡扇发动机自适应加减速控制的设计方法,考虑到系统中存在的噪声会使自适应加减速控制产生参数漂移现象,采用了变阻尼修正的自适应控制规律,得到以下结论:
(1)自适应控制能够实现被控对象输出y伺服跟踪任意的外部有界指令ycmd(t)信号,由于ycmd(t)是任意的,表明自适应控制适用于涡扇发动机的加减速过渡态控制;
结合雨洪利用措施,强化屋面径流净化技术、地表径流草地渗滤处理、生态护岸技术等,减轻雨洪径流中污染物浓度及其对水环境的影响。利用屋面径流分流技术,对重污染和轻污染径流进行分类拦截、储存和排放,分别治理和利用。利用草地及土壤系统污染控制技术,通过适合的草种、草深、土壤质地和土层厚度,达到削减污染物的目的。利用生态护岸技术及河岸缓冲带拦截与净化污染物,降低入河径流污染浓度。
(2)在系统存在白噪声干扰的情况下,自适应参数被限制在±0.003的范围内,没有出现参数漂移现象。
(3)在快速加减速过程中,加减速燃油流量未出现大幅超调和下垂,加减速时间不超过4 s。
