液压震动式夯平船工作原理及管理
2021-05-17
(中交一航局第三工程有限公司船舶分公司,辽宁大连 116000)
液压震动式夯平船兼具运行稳定、保养便捷等特性,以特殊耐磨钢为材料制作震动板,内置减震装置,可确保设备平稳运行。
1 工程概况
工程沉管基槽基础换填及夯平段起讫里程K2+084~K2+951,总长867 m,含E8~E13管节。施工现场的水深约30 m,换填基槽区域的基础厚0.19~6.41 m,换填基础底宽37.4 m。沉管基础换填施工使用材料为重量10~100 kg的块石,换填方量99 162.68 m3,夯平面积60 706.35 m2。
2 液压震动式夯平船的改造
技术人员以工程建设需求为准,组织夯平船的改造工作,涉及船舶的改造、硬件设施的配套等内容。经夯平船创新改造后,使其可在大连湾海底隧道工程中取得有效应用。根据实际建设条件可知,沉管基槽中间软土层与两端基岩层的平顺过渡是工程的重难点内容,为解决软土层地基易失稳的问题,应采取基础换填和夯平措施。
传统方式中,以50 t履带吊和Ф1.2 m夯锤(吊重5 t)为主要施工设备,其运行效率偏低,经夯平处理后软基的密实度易偏离设计要求。为提高施工质量,经多方探讨后,提出液压锤夯实的方法,借助液压锤提供的激振力,使施工现场的块石基床转为平整、稳定的状态,确保基床顶面可满足平整度的要求。
(1)全面落实基础设计工作,即船舶改造的稳定性验算、夯平行车结构的设计、夯板结构的设计等,以便为后续工作的开展提供参考。
(2)以前述的设计资料为准,组织设备的加工、制造等相关工作。
(3)在船舶上有序将轨道、夯平行车等相关设备安装到位,根据硬件设施开发软件,包含船舶定位系统的创建、夯板水平度检测技术的应用等。
(4)为系统配套电源,连接软件与硬件,共同组成完整的体系。
(5)发现问题并及时处理。
3 系统基本工作原理
为满足定位要求,在船体钢轨道梁两端配套3个GPS接收天线,以RTK方式工作,夯平船运行期间应实时监测各接收天线的大地坐标,测定船体的摇晃幅度及相对位置。以所得的数据为准,由软件系统处理,以直观的方式呈现船体的空间姿态。配套夯板测深仪可测定夯板高程值,可作为日常工作的参考依据[1]。
施工期间,系统可自动监测,以便掌握振动锤的悬吊位置(以坐标的方式呈现)、船舶的方位角等信息,采集的数据及绘制的图形可通过计算机屏幕直观显示,供工作人员分析与管控,人机交互效果较好。
在确定夯实标高的监测结果后,结合海底地形勘察结果,综合分析后定点、定量抛石,后续可利用声学设备展开监测,以确定夯实后的标高及平整度,将其与设计要求对比,判断是否满足要求。
4 液压震动夯平系统的基本结构
液压震动夯平系统集多类装置于一体,即“C”形轨道、夯平小车、行走机构、液压系统、液压振动锤、升降机构(具体包含两部分,分别服务于震动锤和液压油管)、夯板、定位及控制系统。
“C”形轨道为基础装置,其稳定安装在船舶甲板处,在轨道两端分别配备卷扬机(各1台),提供牵引力带动夯平小车沿铺设好的轨道行走。GPS布置在船舶甲板处共3套,考虑到信号干扰问题,将其设置在高度6.5 m的钢架上,确保其高出各类甲板建筑物,以免遮挡。监测控制系统布设在甲板的操作室内,以便工作人员及时管理。
“C”形轨道由钢板制作,并与母船甲板焊接于一体,以保证夯平小车可在轨道上稳定运行。在夯平小车的滑动横梁上设置滑块(底部、顶部及外侧三个区域),增添适量的润滑脂,可减小摩擦力,使夯平小车的运行具有顺畅性。为保证船舶防台的稳定性,在夯锤组底层的夯板处焊接4个吊点(布设在夯板的四个角),在悬梁吊架上垂吊4根钢丝绳,将其与吊点连接;在夯板上配套插销装置,以便与船舶舷外的固定销孔连接,保证船舶的稳定性、安全性。按12.5 m的高度设置液压油管吊架,可保证各类长度的油管均可被顺利吊起[2]。
5 夯平施工定位系统组成
5.1 硬件
系统硬件的基本组成为GPS、激光测距仪、倾角传感器、夯板测深仪、潮汐仪、串口服务器、工控机。
5.2 软件
软件的配置以各类硬件的运行特性为准,结合施工需求,合理配备软件。依托VC++平台开发测控软件,基于Windows系统运行。
(2)创建并逐步完善参数数据库,涵盖的内容包含但不限于基准船位、倾角传感器的标定系数等,在丰富数据库的内容后,可根据需求及时查阅特定阶段的作业情况,可作为后续质量分析的依据。
(3)创建定位参数数据库,包含船体预定位坐标等相关信息。
(4)对接GPS接收机,以便及时读取该装置的数据,同时可读取测控转换箱等各类辅助装置的数据,提高数据的完善性。
(5)根据前述分析可知,共配备3台GPS,在汇总采集数据后,结合船体几何参数,展开几何参数计算,可确定振动锤所处悬吊位置的具体坐标,判断其位置情;以数字显示的方式呈现实测坐标以及其与设计坐标的差值;生成图形,直观显示船体所处的位置。
(6)展开船体纵倾、横摇角及船方位角的计算,呈现具体结果。
(7)生成夯实坐标记录表,并将其完整保存,后续可根据需求及时调取。
(8)系统调试和定位过程中,均可呈现各子系统的实测数据,为各类设备工作状态的判断提供依据,可打印系统中的各项监测内容,若存在异常之处,工作人员可根据实际情况采取处理措施,切实解决问题[3]。
6 软件使用流程
软件的使用流程如图1所示。
积食且腹胀便秘选四磨汤 积食且伴有明显腹胀、腹痛、便秘,喝四磨汤口服液能顺气降逆,消积止痛。孕妇、肠梗阻、肠道肿瘤、消化道术后者禁用。
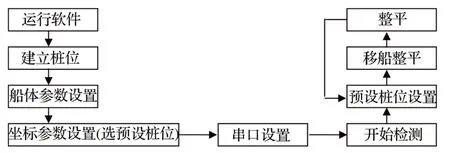
图1 软件使用流程
6.1 步骤
(1)建立桩位:以设计要求为准,导入预定桩位信息。
(2)设定船体参数:包含仪器改正值、仪器应急值、平滑次数等。
(3)设定坐标参数:选择具有可行性的坐标转换参数,设定投影参数、椭球参数等。
(4)串口:设置并打开串口。
(5)桩位设置:根据施工需求选择目标桩位信息,将其完整导入软件内。
6.2 优势
(1)采用VC++平台,其具有功能丰富、稳定可靠的特点,开发的软件可更好满足日常使用需求,可在既有基础上进行升级操作。
(2)兼容性强,可连接市面上各类主流的GNSS接收机等相关装置,解决了受接收机类型限制的问题。
(3)可拓展性强,在Win7、Win8、Win10系统中均具有适用性。
(4)可提供丰富的内校核功能,系统能够精准识别错误信息,及时做出响应,以便相关员工可根据呈现的信息及时发现问题,采取针对性的处理措施。
(5)定位精度高,在浪涌环境中可拥有较强的定位精度,平面误差可在4 cm以内,高程误差可在10 cm以内。
(6)可对接多个指定的PAD终端,可将移动船的相关数据输出至指定的PAD终端,信息的沟通效率较高。
7 结语
综上所述,通过对夯平船工作原理的探究及改进,形成软硬件相配套的完整系统,可为海底隧道沉管基础的夯平作业提供可靠的支持,达到筑安全、保质量、提效率、增效益的效果。
(1)液压振动锤的夯实效率较高,可达到普通重锤夯实效率的5倍,有助于提高施工效率。
(2)在普通夯锤的使用过程中,易发生倒锤等问题,液压振动锤的运行稳定,高差达到1 m时可以有效夯平,正常情况下夯后高差可控制在20 cm以内。
(3)通过潮位补偿技术等配套技术的综合应用,有助于提高夯平船的自动化水平。
(4)通过软件和硬件相结合,可以软件为驱动,带动硬件的运行,提升夯实工作效率。