基于TRIZ理论的甜菜制糊技术研究
2021-05-03姚一婧
陈 刚,姚一婧
(黑龙江大学 机电工程学院,哈尔滨 150080)
0 引 言
甜菜制糊为甜菜品质检测的前期处理工序,用于甜菜群体品质检测的多株甜菜混合测定取样,制取少量具备代表性的样品菜糊,进而进行甜菜含糖率和其他成分分析。样品取样方法为逐株用锯糊锯片在位于块根非根沟一面的居中位置,纵向掏沟至1/2深度锯取甜菜糊,然后将甜菜糊聚集在集糊器内。
我国甜菜品质检测前期处理技术和设备还比较落后,许多方面有待改进,需要提高甜菜品质检测工作效率和准确性,以适应制糖工业发展需要。甜菜制糊技术和设备存在的问题主要有:人工喂料操作复杂,劳动强度大,安全性差。工作时设备振动,集糊器托盘时常脱落,造成甜菜糊损失,影响检测准确性。锯糊时甜菜糊飞溅,设备清理(洗)困难。甜菜制糊机的应用特点是每年在甜菜收获(季节)后半个月内集中运行使用,所以要求设备处理效率高,清洗便捷,且易于维护保养,制造成本低。
TRIZ理论是一种创新方法学,它克服了传统创新方法随机性、无序性等缺点,使创新走出了盲目的、高成本的试错和灵光一现式的偶然,大大加快了创造发明的进程,并能得到高质量的创新产品[1]。针对上述甜菜制糊技术存在的问题,尝试运用TRIZ理论,快速准确地确定问题的探索方向,突破思维障碍,找到解决甜菜制糊技术问题的方案。
1 系统分析
1.1 功能分析
功能分析用于理清技术系统的主要功能及辅助功能,以便理解系统,找出系统的问题所在[2]。甜菜制糊技术系统主要功能为甜菜锯糊、甜菜输送,辅助功能为菜糊收集。通过对该技术系统进行分解,明确了系统各个组件的功能及组件之间的互相关联作用。构建的甜菜制糊系统功能模型如图1所示。
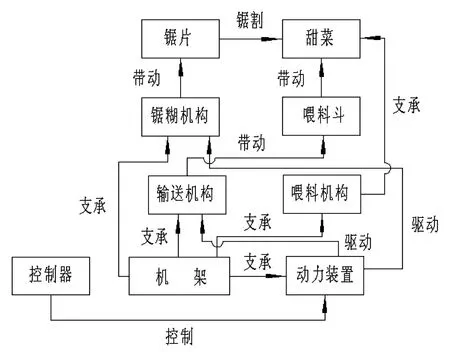
图1 甜菜制糊系统功能模型图
1.2 最终理想解与资源分析
运用TRIZ理论解决问题,首先不考虑客观限定的约束条件,理想化地定义最终理想解,确保问题解决过程沿着最终目标前进,克服惯性思维,提高创新效率。设定了最终理想解,就是设定了技术系统改进的方向,即使理想的解决方案不能100%获得,也会引导得到最巧妙和有效的解决方案[3]。经分析,甜菜制糊技术改善的最终理想解为:甜菜制糊机能够自行高效(安全)地制取甜菜糊。达到理想解的障碍为:甜菜制糊喂料作业劳动强度大,安全性差,集糊器托盘时常脱落,甜菜糊飞溅,清理困难。
资源分析即全面系统化地考虑可利用资源,以激发解决问题的创造性灵感。经分析,该系统可利用的资源包括场资源,即电场、机械场、磁场;空间资源,即系统内部空间、机架上及周围空间;时间资源,即系统喂料操作时间、锯糊时间、卸料时间等;功能资源,即系统动力、机架承载、输送机构的传递功能等。
TRIZ理论的三大核心点是理想解、矛盾和资源,它们贯穿于解决问题的始终[4]。运用TRIZ理论解决问题时,应全面考虑系统所涉及的资源,通过对资源的合理利用,解决矛盾,实现理想解。下面,结合TRIZ理论的具体应用,探讨甜菜制糊技术的具体矛盾(问题)及解决方法。
2 ARIZ算法在甜菜喂料机构研究中的应用
甜菜制糊要求效率高,系统(甜菜制糊机)处理能力一般达到960株/h,采用人工向喂料斗内喂料装填甜菜。甜菜大小不同,喂料时均需将其中心线对准喂料斗中心,且双手握持甜菜待喂料斗运动到位时,向喂料斗运动反方向推送甜菜,直至甜菜完全进入喂料斗深处后方能撤出双手,以保证下一步锯糊工序能够顺利可靠完成。如果撤手不及时,运动的喂料斗容易碰伤手。整个喂料动作复杂,安全性差。
ARIZ是一种非常强大和精准的方法,能指引人们有序工作,找到最佳解决问题的方法[5]。ARIZ一般用于解决状态比较含糊、复杂的问题。应用时需要对问题进行分析和简化,建立一个可以准确描述的极其单一化的模型。以下,尝试按照ARIZ-85的步骤来分析解决甜菜制糊技术中的甜菜喂料问题。
2.1 分析问题
问题最小化:甜菜制糊技术系统用于甜菜群体品质检测,制取少量具有代表性的样品菜糊。与制糊机相关的部分包括:机架、输送机构、锯糊机构、锯片、喂料斗等。技术矛盾1(TC-1):如果手持甜菜对准喂料斗,等待喂料斗运动到位,再向喂料斗运动反方向推送,甜菜可完全进入喂料斗,但喂料工艺操作复杂,安全性差。技术矛盾2(TC-2):如果手持甜菜不顾及是否对准喂料斗,不等喂料斗到位,又未向喂料斗运动反方向推送甜菜,甜菜就不能完全进入喂料斗,但喂料工艺操作简单、操作安全性好。
确定冲突元素:产品-甜菜,工具-喂料斗。
建立技术矛盾模型。TC-1:甜菜对准喂料斗,等待料斗,推送甜菜,甜菜可完全进入喂料斗,但操作复杂,安全性差。TC-2:不顾及甜菜是否对准喂料斗,不等待料斗,未推送甜菜,甜菜不能完全进入喂料斗,但操作简单,操作安全性好。
选择技术矛盾,TC-1:甜菜可完全进入喂料斗,有利于下步锯糊工序顺利可靠完成。
强化技术矛盾,手持甜菜喂料,甜菜完全进入喂料斗,再向料斗运动反向方推送,操作更复杂,安全性极差。
陈述问题模型,冲突元件:甜菜、喂料斗。冲突的强化:甜菜完全进入喂料斗,再向料斗运动反方向推送,操作更复杂,安全性极差。找到X元素,不顾及是否对准喂料斗,不等喂料斗到位,又未向喂料斗运动反方向推送甜菜,甜菜也能完全进入喂料斗。
应用标准解,考虑利用标准解法的系列解法来解决问题模型,但没有找到。
2.2 分析问题模型
主要目标是找到用来解决问题的有效资源(空间、时间、物质和场)。
定义操作区域(OZ),甜菜与喂料斗接触处的空间。
定义操作时间(OT),发生冲突的时间段(T1):甜菜向喂料斗装填的时间。冲突发生前的时间(T2):甜菜向喂料斗装填前的时间。
查明资源,场资源:电场、机械场、磁场。空间资源:系统的内部空间、机架上及周围空间。时间资源:系统喂料操作时间、锯糊时间、卸料时间等。功能资源:系统动力、机架承载、输送机构的传递功能。
2.3 陈述最终理想解和物理矛盾
可得到最终理想解(IFR),也确定了阻碍得到IFR的物理矛盾,指示出获得理想解的方向。
表述IFR-1:引入X元素,在操作区和操作时间内,不会以任何方式使系统变复杂,不用顾及甜菜是否对准喂料斗,不用等喂料斗到位,又不用推送,并且甜菜能完全进入喂料斗。
强化IFR-1:再次分析操作区内及周围可利用的资源,没有发现任何与X要求相近的资源。
宏观物理矛盾:操作区的操作时间内,为了使甜菜能完全进入喂料斗,需对准喂料斗,等待喂料斗到位,再向喂料斗运动反方向推送。为了操作简单、操作安全性好,不顾及甜菜是否对准喂料斗,不等待料斗,不推送。
微观物理矛盾:操作区的操作时间内,为了使甜菜微粒能完全进入喂料斗,需对准喂料斗,等待喂料斗到位,再向喂料斗运动反方向推送。为了操作简单、操作安全性好,不顾及甜菜微粒是否对准喂料斗,不等待料斗,不推送。
表述IFR-2:操作区的操作时间内,不用顾及甜菜是否对准喂料斗,不用等喂料斗到位,又不用推送,并且甜菜能自己完全进入喂料斗。
使用物-场分析。工件(S1)-甜菜,工具(S2)-喂料斗,场(F)-机械场。S1和S2之间存在又不存在冲突,无法建立物-场模型。
2.4 利用资源
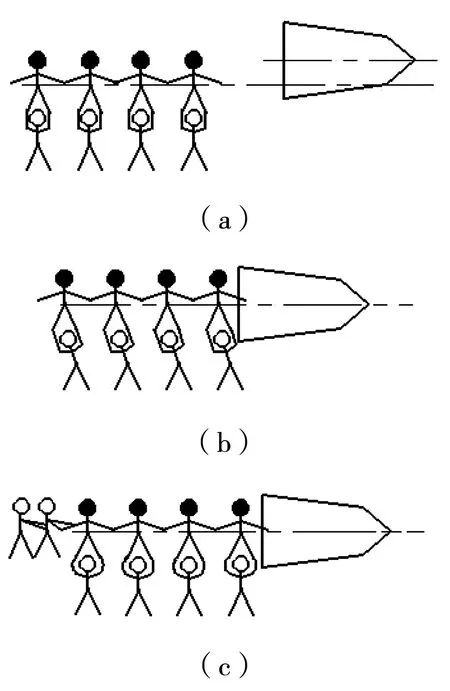
图2 甜菜喂料问题小人模型图
从IFR返回,理想解是:不用顾及甜菜是否对准喂料斗,不用等喂料斗到位,又不用推送,甜菜能完全进入喂料斗。
使用混合物质资源:采用能向后推送甜菜又可依据其大小(重量)使甜菜自行对准的机构。
技术方案解决:在该甜菜制糊机机架上部的喂料空间内,研究设计一个特殊的喂料机构替代人工向喂料斗内填加样品甜菜的操作。该喂料机构由上部刀片状的尖头支承杆、弹簧钢制成的弹性挡推片、圆柱螺旋压缩弹簧及支座等组成,支座固定在制糊机机架上,如图3所示。

图3 喂料机构原理结构示意图
采用该喂料机构,操作工人只需手持甜菜将其最底部插放在支承杆上部刀片状的尖头内,即可撤手。由于支承杆下部分别由适当弹力的压缩弹簧支承,可实现依样品甜菜大小(重量)不同,自行调节甜菜中心线高度,使其对准喂料斗中心。由于喂料斗下部开有贯通的长槽,因此当喂料斗运动到位,带动甜菜向锯片方向运动时,喂料斗底部不会与支承杆上部刀片状的尖头碰撞干涉。另外,在喂料机构支座上设有适当弹力的弹性挡推片,当喂料斗带动甜菜运动到弹性挡推片处,该挡推片将向喂料斗运动反方向推送甜菜,使甜菜完全进入喂料斗,为锯糊工序做好准备。
经过以上几个步骤找到了问题解决方案,可以直接进入ARIZ步骤七。步骤七:分析解决物理矛盾的方法,主要目的是审核拟解决问题的实施方案质量。审核解决方案:解决技术问题时,没有产生附加的问题。解决方案的初步评估:获得的方案能保证实现理想化的最终结果IFR-1的主要要求。方案消除了宏观物理矛盾,在问题实际条件中能解决人工向喂料斗内装填甜菜操作复杂、安全性差的问题。经过专利搜索审查解决方案的新颖性,未见到有关专利涉及的内容。预估应用方案时所产生的子问题:采用已获得的方案,尚未发现会带来附加子问题。
3 物—场模型分析方法在集糊器研究设计中的应用
集糊器用于收集甜菜制糊锯片高速旋转时锯下的甜菜糊,它由托板和托盘组成。托板固定在机架上,托盘由托板支承。由于工作中托盘需在托板上频繁地取下和放上,所以将托板和托盘固定在一起会给拿取操作带来不便,还会降低作业效率。但如果不固定,制糊机工作时机架的振动会使托盘从托板上脱落,造成甜菜糊损失,影响检测的准确性。
使用物—场模型分析和解决问题,有助于使问题聚焦。根据物—场模型理论,物质可以是工件或工具,而场是能量形式,是不同物质之间的相互作用或影响[6]。针对上述集糊器研究设计中托盘脱落问题进行物—场分析,可以找到技术系统的改进方案。具体分析过程如下:确定相关的元素:工件(S1)—托盘,工具(S2)—托板,场(F1)—机械场。构建物—场模型:本问题为效应不足的完整形式的模型。对应的初始模型如4图所示。

图4 物—场初始模型图
选择一般解:效应不足的完整模型为第三类模型,有三个一般解法:4,5,6[7]。本问题选择的一般解法是5,即另外增加一个场F2来强化有用的效应。如图5所示。

图5 物—场模型图
发展概念:增加另外一个磁场F2来强化有用的效应。由于托盘和托板均为钢板材料制成(外表面分别为搪瓷涂层和喷塑处理),在托板底部固定适当磁力的永磁铁,即可增加一个磁场,使托盘和托板之间产生适当强度的吸引力。这样一来,既可保持托盘工作时不会由于设备振动从托板上脱落,又能方便地将托盘从托板上取下,增加的磁场F2起到了强化有用的效应。方案结果如图6所示。

图6 增加磁场使托盘和托板间产生吸引力方案示意图
4 发明原理在挡料防护板结构设计中的应用
糖料甜菜试验方法国家标准规定,甜菜制糊应满足锯片转速2 900 r/min和锯片直径 250 mm的要求。高速旋转的锯片锯割甜菜时,锯下的甜菜糊会沿锯片旋转的切线方向飞出,大部分落入集糊器托盘之内,但也不可避免地有一部分飞溅到托盘之外的电动机、输送机构、机架等处。这些飞溅出来的甜菜糊会对设备造成污染。由于甜菜糊黏度大,因而设备使用后的清理十分不便。
发明原理“预先作用原理”的含义是:事先对物体(全部或其部分)施加必要的改变。在最方便的位置预先放置物体,使其在第一时间起作用。“分割原理”的含义是:将一个物体分割成相互之间独立的若干部分,使一个物体分成易于组合及拆分的部分[8]。根据以上两个发明原理的提示,特殊设计了可拆卸的挡料防护板,并将其安装在适当的位置以遮挡甜菜糊向电动机、输送机构、机架等处飞溅。该防护板由若干部分组合而成,拆卸及安装方便,便于清理洗刷。可拆卸的挡料防护板的效果如图7所示。

图7 可拆卸的挡料防护板遮挡甜菜糊飞溅效果图
5 结论
上述甜菜制糊技术的研究成果已在实际生产中得到了应用,显著提高了甜菜品质检测工作效率和准确性。使用该喂料机构,操作人员只需手持甜菜将其最底部插在支承杆上的尖头内,大小(重量)不同的甜菜均可自行调节中心高度并完全进入喂料斗,操作简单、安全可靠。集糊器托板底部固定适当磁力的永磁铁,使托盘和托板之间产生吸引力,保证了托盘工作时不会因设备振动从托板上脱落带来的甜菜糊损失,提高了检测的准确性。特殊设计的可拆卸组合式挡料防护板遮挡了甜菜糊的飞溅,拆卸、安装、清理洗刷的便利性得到了提高。制糊技术研究成果及在制糊机中的应用如图8所示。

图8 甜菜制糊技术研究成果在制糊机中的应用
运用TRIZ理论的ARIZ算法解决了人工向喂料斗内装填甜菜时操作复杂、劳动强度大、安全性差的问题。采用物—场分析方法解决了集糊器托盘脱落的问题。依据预先作用原理和分割原理,设计了可拆卸组合式挡料防护板,解决了甜菜糊飞溅的问题,且拆卸及安装方便,便于洗刷清理。TRIZ理论的应用快速准确地确定了问题的研究方向,加速了解决这些技术问题的效率,提出的技术方案已在实际生产中得到了应用,证明了其合理性和有效性。
