接触式轮廓仪自动标注问题的分析
2021-04-28丁伯伦张力娟周金倩朱贝贝
丁伯伦 张力娟 周金倩 朱贝贝
(扬州工业职业技术学院,江苏 扬州 225127)
1 案例分析
以2020年全国大学生数学建模竞赛D题第一问为例,根据某一工件1在水平状态下的测量数据(数字信号),来标注出被测工件表面轮廓线的各项参数值。

图1 某工件1在水平状态下测量的轮廓线
假设被测工件的轮廓线是由直线和圆弧构成的光滑曲线,首先根据工件1的水平测量数据(数字信号),运用Matlab软件可得工件x轴与z轴数字信号的平面图,如图2所示:

图2 工件1在水平状态下的数字信号坐标图
可设定z轴初始点为-1.770,那么近似水平状态轮廓线的表达式为z0=-1.770,再以第一段倾斜线为例,运用Excel进行数据拟合,可得轮廓线D1的表达式为z1=-2.7468x+134.95。采用类似的方法可得每段倾斜线的表达式,如表1所示:

表1 每段倾斜线的表达式
结合“人字形”两边轮廓线的表达式,求出相应交点坐标,即可得到“人字形”轮廓线的长度。如表1,已知“人字形”两边的轮廓线D7、D8的表达式,可求出轮廓线D7、D8的交点坐标为(76.810,-0.782),运用Excel进行数据拟合,可求得轮廓线D7、D8的长度,D7=5.235,D8=5.147,结合之前水平线z0=-1.770,得到人字线性的高度为0.998。
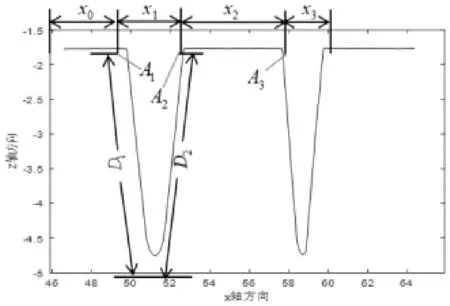
图3 工件1在水平状态下的数字信号坐标图的局部图
运用Excel软件拟合出工件1数字信号的局部图,利用水平线段的表达公式:z0=-1.770与轮廓线D1的表达公式z1=-2.7468x+134.95求出交点A1的横坐标为49.772,同理利用水平线段的表达公式z0=-1.770与轮廓线D2的表达公式z2=2.779x-148.05,求出A2的横坐标为52.676,再用A2的横坐标减去A1的横坐标,即可求出槽口宽度x1=2.904;利用水平线段的表达公式z0=-1.770与轮廓线D3的表达式z3=-3.7092x+212.1,求出交点A3的横坐标为57.653,再利用A3的横坐标减去A2的横坐标,即可求出水平线段长度为x2=4.977。以此类推,可求出其他槽口宽度和水平线段长度如表2所示:
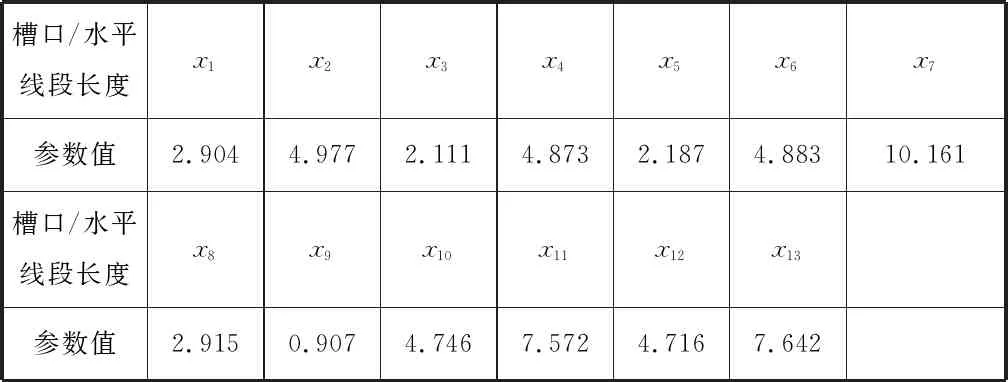
表2 槽口宽度和水平线段长度
根据上述已知条件,求出了各轮廓线的表达公式,由已知的水平线段x0与斜线D1的表达式,得出轮廓线D1斜率kD1=-2.7468,则轮廓线D1与水平线段x0的夹角∠1=arctan(-2.7468),根据角度的关系可得∠1=π=arctan(-2.7468)=110.005°;已知水平线段x2与斜线D2的表达式,可得轮廓线D2斜率kD1=2.7779,则轮廓线D2与水平线段x2的夹角∠2为arctan(2.7779),根据角度的关系可得∠2=π-arctan(2.7779)=109.798°,同理可得其他斜线与水平线之间的夹角,如表3所示:

表3 斜线与水平线之间的夹角

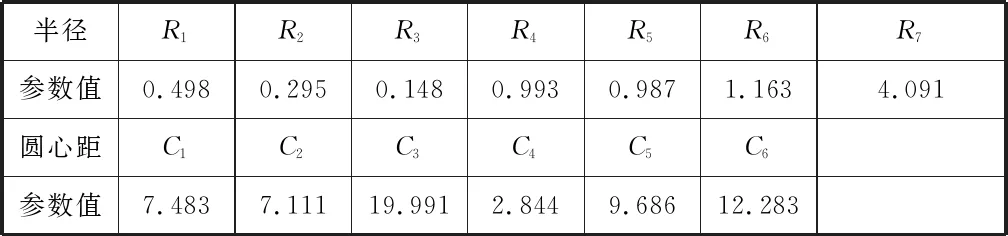
表4 圆的半径和圆心距
2 结语
本文针对接触式轮廓仪的自动标注问题,利用Matlab软件与数据处理技术,建立特定的圆方程、直线方程模型,合理标注出工件轮廓线的各项参数值。首先对被测工件的轮廓线假设成光滑平面曲线以获取主体轮廓,然后利用Matlab软件对测量数据(数字信号)进行轮廓提取,最后通过倾斜线,直线和圆弧等信息得出元件各项参数值。在同一状态下的多组测量数据的情况下,拟合后得到的结果会相对精确,具有一定的参考性。