微型电动汽车动态无线充电技术的研究
2021-04-27邱兴阳梁锋林郑维清郑德山
邱兴阳,梁锋林,郑维清,郑德山
微型电动汽车动态无线充电技术的研究
邱兴阳,梁锋林,郑维清,郑德山
(湄洲湾职业技术学院 自动化工程系,福建 莆田 351119)
研究了基于无线充电技术的微型电动汽车动态充电系统。当微型电动汽车需要充电时经无线充电模块发出充电请求信号,信号经充电控制器采集并通过ZigBee模块传送至后台协同管理中心,由后台协同控制管理软件分析处理实时控制充电控制器的充电状态,完成微型电动汽车的无线充电。相对于有线充电,无线充电更加安全和灵活,具有重要的研究意义。
电动汽车;动态;无线充电
随着社会的发展和科技的进步,能源问题与环保问题显得越来越突出,发展和普及电动汽车等新能源汽车的呼吁也越来越多,电力驱动车辆成为汽车工业研究、开发和使用的热点[1]。随着国内外纯电动汽车和插电式混合动力汽车的量产和销售越来越多,对其采用充电技术而言,现在市面上的电动汽车充电方式全部采用直接接触充电,非接触式的无线充电技术处于刚起步阶段[2]。国内外多家研究机构和汽车生产商已经开始研究无线充电技术在电动汽车上的应用,从便利性来看应用无线充电技术给电动汽车动力电池充电优势更加突出,从使用性来看非接触式无线充电技术更适用[3]。无线充电根据能量转换机制的不同一般可分为3种:电磁感应式充电、磁耦合共振充电、微波充电,由于微波充电效率较低一般不用于电动汽车的充电领域,故电动汽车的无线充电一般采用前两种方法[4]。利用无线充电技术可以改变电动汽车繁琐的充电方式,甚至可以实现电动汽车在行驶过程中进行自动充电,实现充电的智能化、人性化,同时解决接触式充电在维护和安全方面存在的问题[5]。本文搭建了微型电动汽车无线充电系统,用来验证和优化电动车协同充电的调度算法,采用模糊控制算法,能够迅速找寻电动汽车充电最佳位置,实现充电效率最高化,效率能超过70%,减少充电费用并保证电网的安全运行。
1 系统总体设计方案
无线充电的原理就是通过发射装置将电能转化成电磁波后发射出去,接收装置接收到电磁波后再通过电力电子装置将其转换为电能[6]。电动汽车无线充电技术的一个关键性能指标是能量传输效率,无线充电发送装置和接受装置的振荡频率匹配程度以及无线充电装置中耦合变压器的耦合系数对能量传输效率产生的影响最大[7]。本文针对微型电动汽车采用磁耦合共振充电,动态充电系统总体设计方案如图1所示。在本系统中要求微型电动汽车具有自动行驶功能、信息采集功能、无线通信功能。充电控制器具有智能化的控制功能,包括充电信号计量采集功能和无线通信功能。而协同控制中心具有数据储存、分析和处理功能,当然也具备无线通信功能。
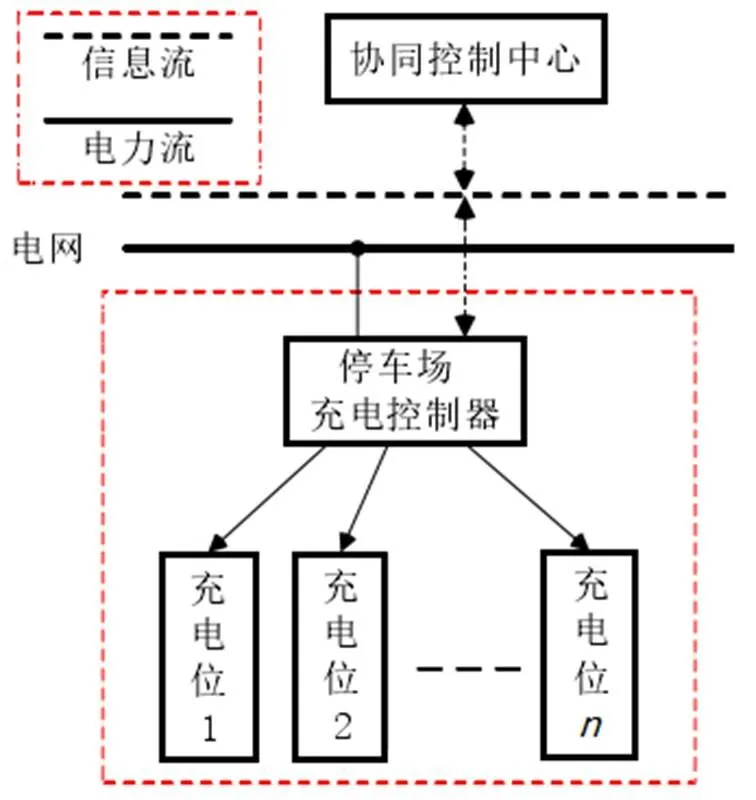
图1 微型电动汽车动态充电系统框图
2 无线充电系统的硬件设计
2.1 无线接收端的硬件设计
无线接收端微型电动汽车的控制器采用51单片机,硬件框架如图2所示。控制器采用模糊控制的算法,电动车自动行驶到充电位置停稳后,车子的磁极位置固定后即进行最佳位置搜索,由步进电机驱动磁极运动,同时微型电动汽车的信息采集系统,不断扫描无线发送端的电压电流信号,并将信号储存。单片机会一直扫描步进电机运行时电压电流值,步进电机运行一次,控制器就扫描一次,将扫描值与前一次的检测值进行比较,所得到的扫描值与储存值之间的差值大于上一次检测值与储存值的差值,则步进电机会继续运行,直到扫描值与储存值之差比上一次的值小,则找到最佳坐标位置。由于车子的坐标位置是由X轴和Y轴决定的,所以在搜索最佳坐标位置是先找出X轴的坐标点,然后再找Y轴的最佳坐标点。图中的红外传感器是电动汽车自动行驶时用来找寻初始充电位置,ZigBee模块是用来与后台协同管理控制中心进行通讯,上传数据以及接收控制命令。
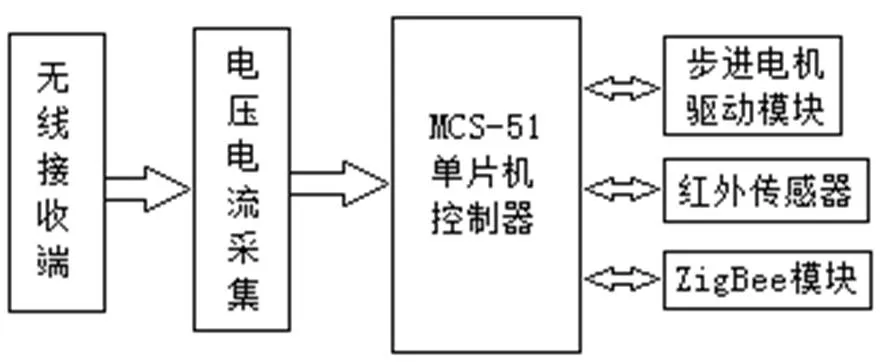
图2 无线接收端的硬件框架
无线接收端的充电模块采用芯科泰公司的XKT-R2芯片,该芯片具有大电流充电功能,宽电压设计工艺以及稳压功能。根据微型电动汽车的12 V充电电压需求,电路设计如图3所示。
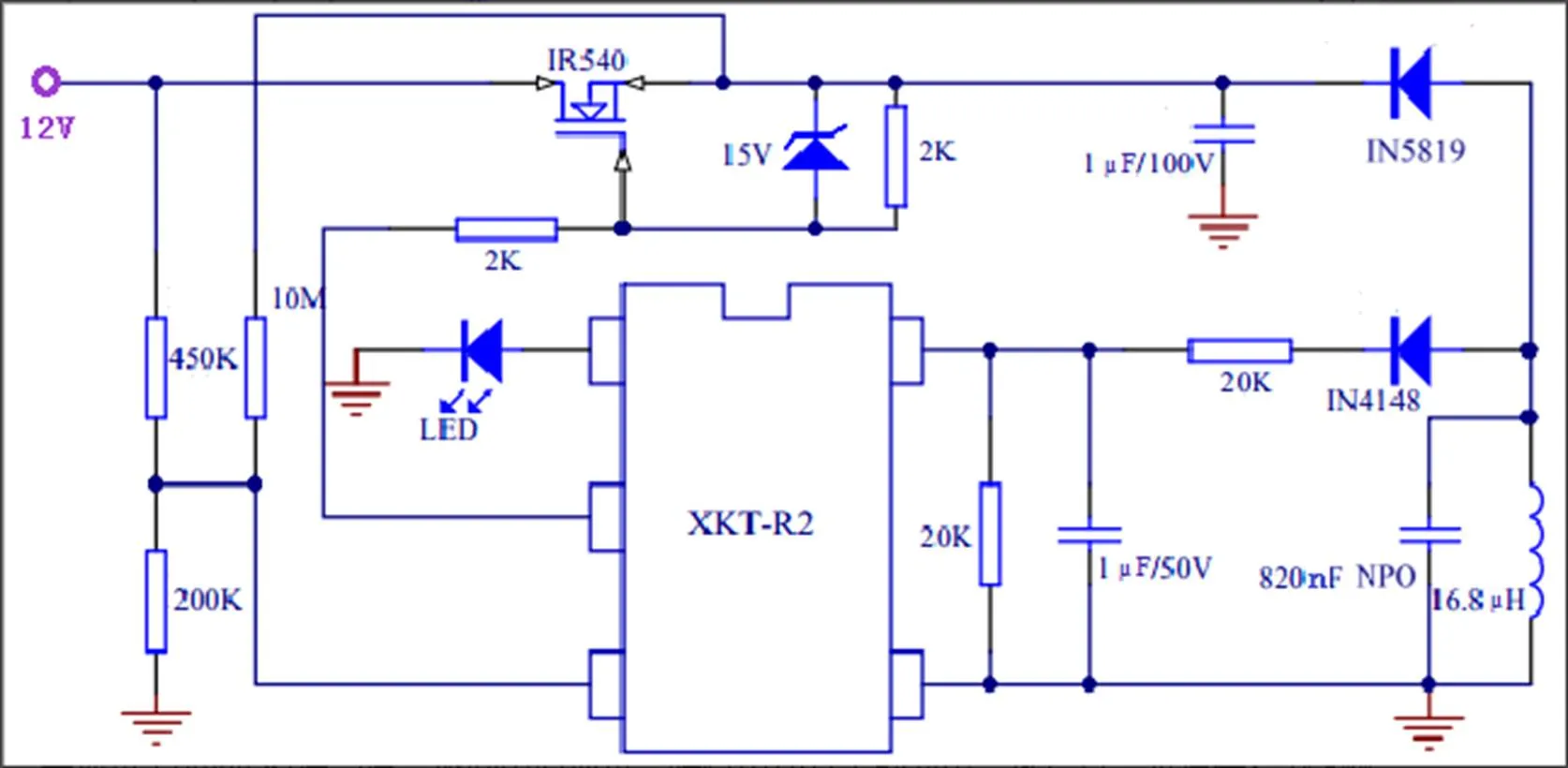
图3 无线接收端充电电路设计
2.2 无线发送端的硬件设计
电动汽车充电时如果不进行管理,可能影响到电网的供配电,因此为了避免电动车充电时给电网造成供配电压力,就要对电动汽车的充电过程进行监测控制[8]。停车场每一个充电位都对应一个充电控制器,控制核心处理器采用STM32F103芯片,辅于红外传感器、电能计量模块、电能控制模块等外部器件或电路实现微型电动汽车的智能充电,硬件框架如图4所示。充电控制器首先通过ZigBee模块与后台协同中心通讯,获得电动汽车的充电需求信息,然后去控制PWM和电能控制模块来实现对高频逆变电源电路的开启和充电速度控制。图中的电能计量模块是当充电开启时用来对电网的电能进行计量,红外传感器是用来检测电动汽车是否在充电区域,显示模块用来显示充电停车位的充电详细信息。
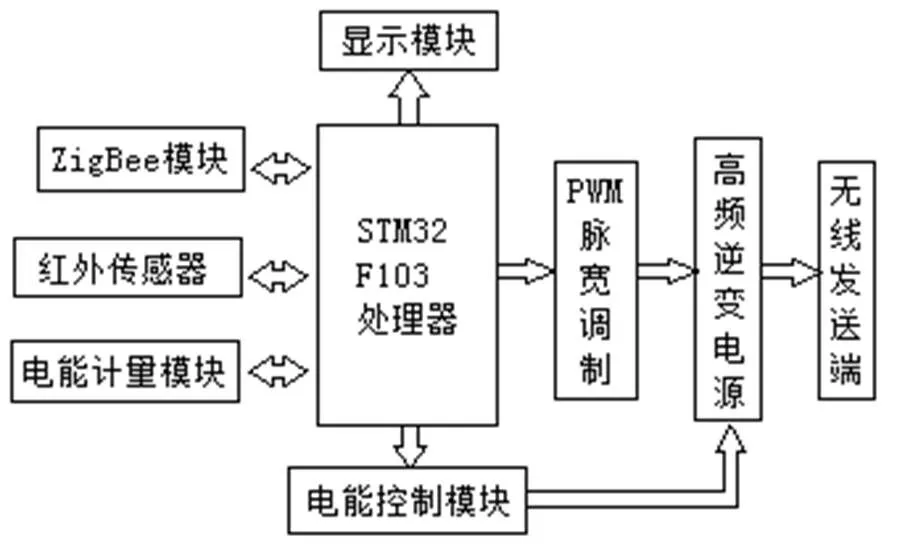
图4 停车场充电控制器框架结构
发送端的无线发射模块采用XKT-801芯片,该芯片是一款远距离大功率充电芯片,输出电压是通过调节电阻改变其电压大小,内部含有高频共振电路,具有频率自锁、自检负载、功率自动控制、高效电磁能量转换、高速传送输电能量等优点[6],电路设计如图5所示。
3 系统软件设计
3.1 系统软件协同通信
系统由软件发送端、接收端和上位机(后台协同控制中心)3大部分构成。电动汽车动态无线充电模型的上位机与发送端、接收端主要是进行信号传递和人机交互。微型电动汽车自身的参数信息和充电控制器采集到的充电计量信息,由ZigBee通信模块传达至上位机后,通过后台协同控制中心设置的软件算法对采集到的数据进行分析和处理,然后将处理过的数据信息指令下发送给停车场充电控制器和微型电动汽车,完成整个微型电动汽车充电系统的协同控制,系统的充电流程如图6所示。系统的后台协同中心软件控制界面如图7所示。
ZigBee通信模块具有节点容量大、低功耗、短延时、传输安全可靠等优点,还可以支持不同的网络结构,系统在应用时要对其进行设置。ZigBee模块有3种节点类型:路由器、协调器以及终端节点。在本系统中后台协同控制中心负责系统的全盘调度,对于ZigBee模块来说其网络通讯的核心是协调器,负责组网而且要让所有信息都传送至协调器中,所以在使用时把协同控制中心的ZigBee模块设置成协调器。充电控制器的ZigBee模块设置为路由器,微型电动汽车上的ZigBee模块设置为终端节点,两者之间的区别是路由器能够进行信息参数的路由转发,而终端节点只能对数据信息进行收发。在使用时,后台协同控制中心与充电控制器进行通信协议设定,具体通信参数信息设定如表1和表2所示。
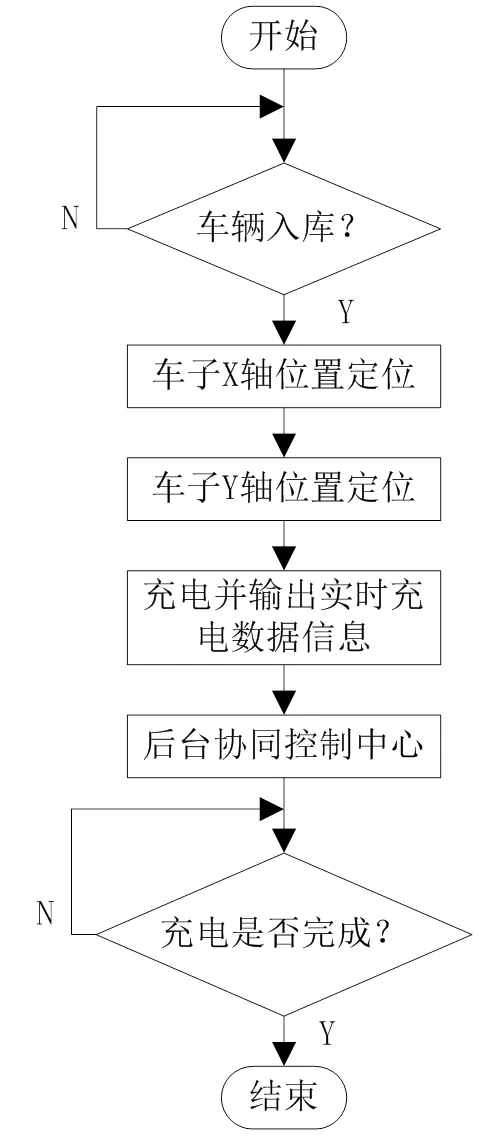
图6 系统的充电流程
表1 充电控制器到后台协同中心的通信协议
位数012345~67~1112~1617~2122~23 内容停车场标识停车场序号停车位序号工作状态错误标志车子编号电池电压充电电流功率终止标识
表2 后台协同中心到充电控制器的通信协议
位数0~45~8910111213~1414~15 内容前缀短地址间隔停车场序号停车位序号开关控制车子编号终止标识
3.2 协同充电调度算法
通常用户一般会选择在电价最低时对电动汽车充电,这样有可能造成该时段形成电网负荷峰值,使得停车场所配备的变压器容量不够,会影响电网的使用安全。为了解决这一问题,本文提出针对同一配电变压器下电动汽车无线充电的协同调度算法。电动汽车协同充电调度算法流程如图8所示。



式中:Ctransformer是变压器的容量,是除了电动汽车充电功率之外其他各用电设备总负荷估算值。
为了防止电动汽车在不超限的时隙内因不按照上述最佳充电序列进行充电而导致超限,变压器负荷管理系统应按式(4)来计算各电动汽车的充电功率上限。

至此,对电动汽车充电采用协同控制调度可以保证其按最佳充电序列进行充电,并确保在整个调度区内不超限,从而避免变压器过载运行,抑制负荷波动,提高配电电网的稳定性,降低用户的充电费用[9]。
4 实验结果分析
根据上述系统的硬件设计和软件设计完成了微型电动汽车充电模型搭建。电动车现场充电电压与电流的波形如下所示。图9是单辆微型电动车的充电电压、充电电流波形图,充电压在13~14 V之间,充电电流2.2 A左右。图10是两辆微型电动车的充电电压、充电电流波形图,充电压在12~13 V之间,充电电流2 A左右。
对不同负载的微型电动汽车进行充电实验中,记录了不同时刻的充电电压、充电电流。具体实验数据如表3所示。
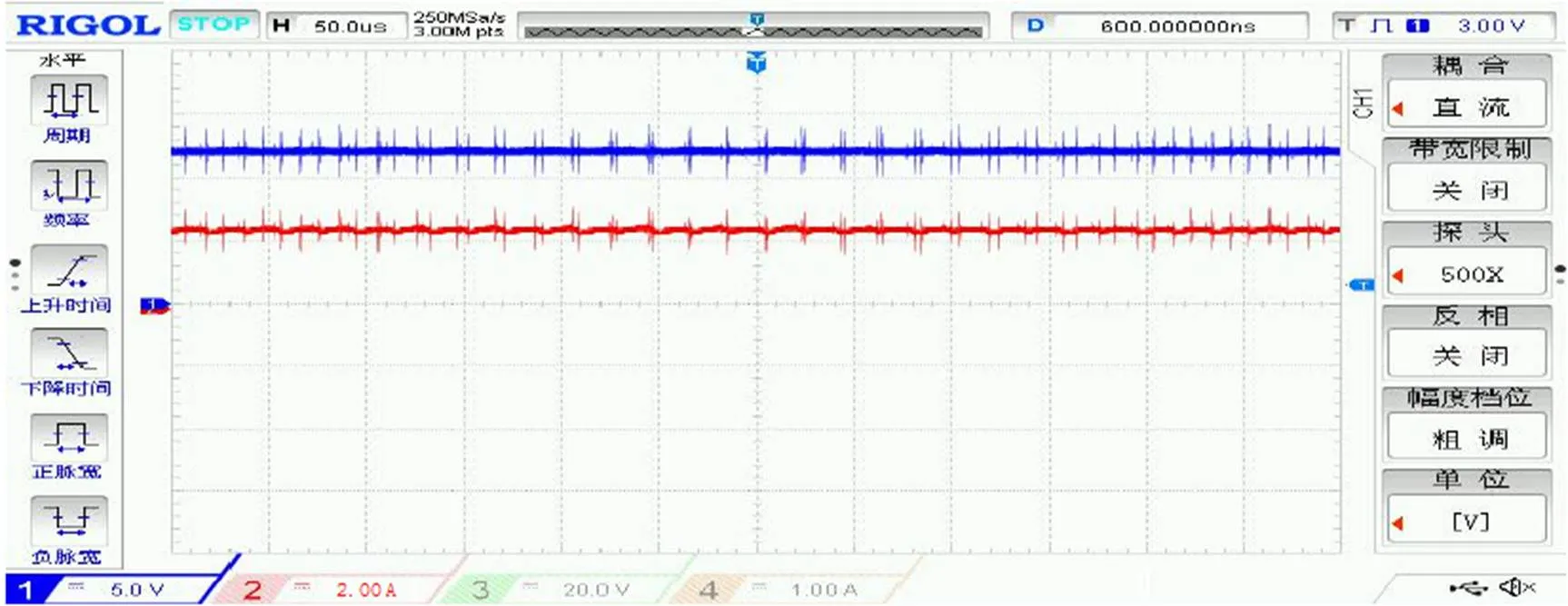
图9 单辆微型电动车充电电压、电流
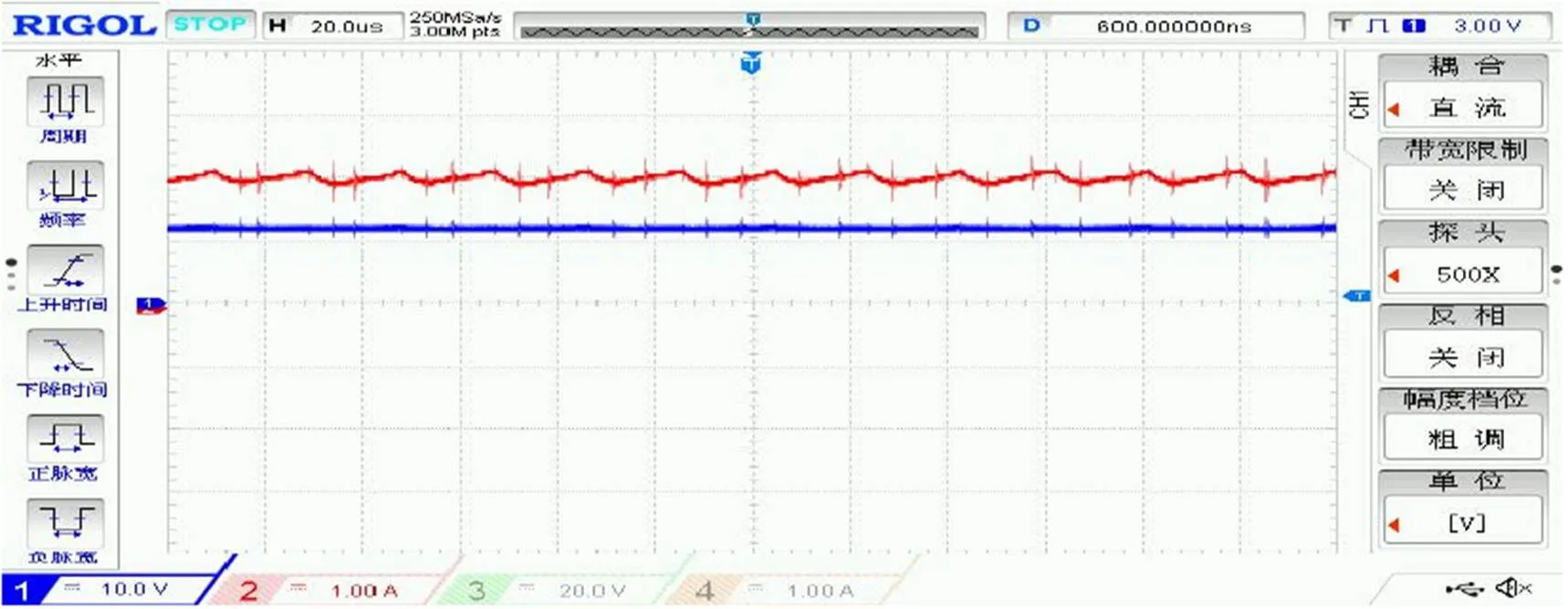
图10 两辆微型电动车充电电压、电流
表3 不同时刻的电动汽车充电电压、电流
充电时间/h单辆微型电动汽车 两辆微型电动汽车 充电电压/V充电电流/A充电电压/V充电电流/A 0~0.513.32.1812.92.10 0.5~1.014.21.8813.91.82 1.0~1.514.61.6314.31.60 1.5~2.015.20.7815.00.72 2.0~2.515.40.2315.20.21 2.5~3.015.80.0215.60.02 3.0~3.516.20.0116.00.01 3.5~4.016.80.0016.60.00
从表3可以看出,当充电电压达到15.6 V左右时,处于涓流充电模式,充电电流很小。通过实验可以得出结论,电动小车在3 h左右就可以充满,证明该设计方案的充电效率较高,达70%左右,充电时间短也能同时说明系统的充电费用较低的优点。
5 结论
目前我国的无线充电相关技术大多处于研究验证阶段,本文介绍了一种基于无线充电技术的微型电动汽车动态充电系统。该系统利用协同调度算法,避免变压器过载,影响电网的正常运行,建立多台电动汽车的最佳充电序列,有效地降低了充电费用。本系统可以用于游乐场的微型电动汽车充电,也可以应用于儿童玩具车充电,具有一定的实用意义和使用价值。
[1] 冯雷, 李松, 丁富强, 等. 电动汽车无线充电技术分析与设计[J]. 电光系统, 2012, 2(6): 56-60.
[2] 赵兴福, 魏健. 电动汽车无线充电技术的现状与展望[J]. 上海汽车, 2012, 30(6): 3-6, 21.
[3] 李维汉, 赵韩, 张坤, 等. 电动汽车无线充电系统的分析与设计[J]. 昆明理工大学学报, 2015, 40(12): 65-70.
[4] 韩建友. 电动汽车动态无线充电关键技术初探[J]. 河北农机, 2017(6): 36-37.
[5] 李树凡. 电动汽车无线充电系统的参数估计[D]. 北京: 中国科学院大学, 2016.
[6] 康彦阳. 感应式电动汽车无线充电系统设计与研究[D]. 西安: 西安科技大学, 2019.
[7] 黄杰, 聂蓉. 基于单片机的电动汽车无线充电自动定位装置控制电路设计[J]. 轻工科技, 2016, 10(10): 26-27, 41.
[8] 赵振乾. 车联网环境下电动汽车无线协同充电模型及应用研究[D]. 开封: 河南大学, 2019.
[9] 张延宇, 曾鹏, 臧传治. 智能电网环境下多电动汽车协同充电优化调度算法[J]. 科学技术与工程, 2015,26(15): 60-65.
Research on Dynamic Wireless Charging Technology for Micro Electric Vehicle
QIU Xing-yang, LIANG Feng-lin, ZHENG Wei-qing, ZHENG De-shan
(Department of Automation Engineering, Meizhouwan Vocational Technology College, Putian 351119, China)
The paper studies the dynamic charging system for micro electric vehicles based on wireless charging technology. When the micro electric vehicle needs to be charged, the wireless charging module sends out a charging request signal, the signal is collected by the charging controller and transmitted to the background collaborative management center through ZigBee module, and the charging state of the real-time controller is analyzed and processed by the background collaborative control management software, so as to complete the wireless charging of the micro electric vehicle. Compared with wired charging, wireless charging is safer and more flexible, which has important research significance.
electric vehicle; dynamic; wireless charging
TN99
A
1674-3261(2021)02-0099-06
10.15916/j.issn1674-3261.2021.02.007
2020-08-11
福建省中青年教师教育科研项目(JZ181027)
邱兴阳(1981-),男,福建仙游人,讲师,硕士。
责任编校:孙 林
