基于多参数稳定分布的GBAS垂直保护级计算
2021-04-13石潇竹刘海颖
孙 颢, 石潇竹, 刘海颖, 李 贺
(1.南京航空航天大学航天学院, 江苏 南京 210016;2.空中交通管理系统与技术国家重点实验室, 江苏 南京 210016)
0 引 言
全球导航卫星系统(global navigation satellite system, GNSS)的地基增强系统(ground based augmentation system, GBAS)为每个可见星提供测距误差校正信息[1],这些校正极大地提高了飞机的定位精度,并支持精密进近和着陆操作[2]。为了进行完好性监测,GBAS使用包络模型方法计算每个可见星的测距误差的包络值[3]和保护级(protection level, PL)[4],PL是与给定完好性级别相关的GBAS定位误差的范围[5]。
GBAS测距误差是各种分布不同的误差源的混合,被国际民航组织和航空无线电技术委员会定义为无偏的高斯分布并建议采用高斯误差包络理论[6]。测距误差的混合意味着GBAS误差的实际分布会显示出比高斯分布更厚的尾部[7]。为了确保实际测距误差的尾部包络,必须膨胀高斯边界的标准差[8]。因此,使用高斯包络理论计算的PL非常保守,降低了GBAS系统的可用性[9]。
近年来已经发现稳定分布在处理厚尾分布信号,例如风能预测、地震子波估计等过程中可以准确表征厚尾分布,但是对于GBAS系统使用稳定分布来描述误差还鲜有研究,因此研究稳定分布的适用性以解决GBAS中的高斯包络问题有重要意义[10]。
在本文中,将使用仿真数据及设计实验所得的数据对稳定分布包络理论进行评估。结果表明,两参数稳定包络理论精确地描述了测距误差的“厚尾性”,四参数稳定包络理论解决了测距误差的“不对称性”“非零均值”等问题。
1 高斯包络模型的PL计算
在GBAS系统中,根据误差的不同来源,将差分定位的误差分为两类:来自参考接收机的误差和来自用户端的误差[11]。GBAS差分校正伪距测量误差的方差[12-14]为
(1)
式中,σgnd,i是第i颗卫星计算的GBAS地面站设备广播的伪距校正误差的标准差,是卫星仰角的函数。根据航空无线技术委员会的规定,不同参考接收机对同一颗卫星的伪距校正值误差的标准差相同,且仅与该卫星仰角相关。σair,i是第i颗卫星计算出的机载用户差分残留误差的标准差,是该卫星仰角的函数;σtropo,i是第i颗卫星对流层延迟残差的标准差[15];σiono,i是电离层延迟残差的标准差[16]。
对于机载接收机,差分定位结果是一个加权最小二乘解[17],可表示为
(2)

此时的定位域误差为
(3)
式中,εv是定位域中的垂直定位误差;Sv,i是第i个测距源的单位误差向量在垂直方向的投影大小;ρi是伪距域的误差[19]。
故由S确定的定位误差方差为
(4)
式中,Sv,i是S中第3列第i行的元素,表示残留到垂直定位误差的第i个卫星的伪距校正的投影系数。
因此,H0假设下的垂直保护级(vertical PL, VPL)可以通过将垂直定位误差概率密度估计至同Pffnd相等来计算[20]:
VPLH0=KffndσV
(5)
(6)
图1中给出了VPLH0和垂直定位误差分布之间的数学关系。钟状的曲线表示零均值高斯误差分布,式(6)中给出的Q函数代表高斯分布的误差超出VPLH0的部分尾部的负数部分,即图中红色区域。

图1 H0假设下的定位误差分布
2 稳定包络模型的PL计算
2.1 稳定分布与测距误差
α稳定分布模型的显著特点是比常规的高斯信号或噪声有更显著的尖峰脉冲,因此其概率密度函数上具有显著的拖尾现象[21]。
稳定分布由α、β、γ、δ4个参数决定,假设有变量X及其独立样本X1、X2,则对于任何a>0,b>0,若存在一个正数c和实数d,使得
aX1+bX2cX+d
(7)
在稳定分布的参数中,参数α称为特征指数,决定该分布脉冲特性的程度。α值越小,所对应分布的拖尾越厚,α值越大,分布越接近于高斯分布,最大值为2。参数β称为对称参数,用于确定分布的斜度。β=0时对应于对称分布,简称SαS。参数σ为分散系数,又称尺度系数,它是关于样本相对于均值的分散程度的度量,其含义类似于高斯分布中的方差。参数δ为位置参数,与β一起决定分布的形状。若满足δ=0,σ=1,则Alpha稳定分布称为标准Alpha稳定分布[22]。
关于稳定分布,若X~S(α,β,σ,δ),那么对于任意a≠0,1,b∈R,有
aX+b~S(a,sign(a)β,|a|σ,aμ+b)
(8)
针对在稳定包络法计算PL的过程中需要将伪距域误差投影到定位域的情况,本文给出了对稳定分布随机变量进行加权求和的公式,即对于任意Nj~S(α,βj,γj,δj),j=1,2,…,n,任意独立的ω1,ω2,…,ωn,有
w1N1+w2N2+…+wnNn~S(α,β,σ,δ)
(9)
式中,
(10)
(11)
(12)
使用稳定分布的加权求和特性解决PL计算的误差投影问题时,不需要对分布函数进行卷积,相比于其他概率分布大大简化了计算量[23]。
在实际应用中,对服从α稳定分布的随机序列进行参数估计至关重要。然而,由于一般的α稳定分布不存在封闭的概率密度函数表达式,因此研究估计精度高、计算量小且参数适用范围广的四参数联合估计方法仍是一项具有挑战性的工作。目前,常用的α稳定分布参数估计方法有:最大似然法[24-25]、样本分位数法、特征函数法、分数阶矩法等[26]。
2.2 两参数稳定分布包络模型
在GBAS测距模型中,通常要求包络模型是对称的,对于稳定分布来说,这意味着β=0。此外,通常将测距误差的概率密度函数视为以原点为中心,这意味着δ=0。
根据式(3),GBAS定位域的垂直误差是伪距误差ρi和投影矩阵元素Sv,i的加权和,根据这个理论,提出了两参数稳定分布包络模型。对于GBAS的每个测距源,可将测距误差视为服从对称稳定分布:
ρi~SαS(α,σi),i=1,2,…,n
(13)
根据式(8),测距误差的投影值即定位误差也服从具有相同参数的对称稳定分布:
(14)
根据式(9),参数σi的加权和为
(15)
归一化定位误差为εv/σ=SαS(α,1),则
VPL/σ=QSαS(Prisk;α,1)
(16)
式中,QSαS(Prisk;α,1)是Prisk下稳定分布的分位数。
2.3 四参数稳定分布包络模型
两参数稳定分布包络模型可以很好地代替零均值高斯模型,解决了样本 “厚尾性”的问题,但是在实际情况中,不同卫星的伪距误差还可能会表现为“非零均值”和“不对称”的现象。因此,面对这些问题,需要更加精确的模型。
在前文中介绍过,参数β和δ决定了分布的形状,如图2所示,两幅图分别描述了参数β和δ对于稳定分布的影响。因此,将参数β和δ加入到PL的计算过程中可以有效提高计算的精度。

图2 β和δ参数对稳定分布的影响
可以看到,β参数会影响所描述的误差样本的对称性,而δ参数会影响所描述的误差样本的均值大小。因此,这两个参数的加入可以配合α和σ参数,更加精确地描述误差样本。
对于GBAS每个卫星的每个测距源,将测距误差及建模为四参数稳定分布[27]:
ρi~SαS(α,βi,σi,δi),i=1,2,…,n
(17)
则加权的定位域误差为
(18)
在确定每个测距源的特征指数α后,根据式(9)~式(11),可以得到通过Sv,i加权后的β、σ、δ,因此
P(εv≥VPL)≤Prisk
(19)
VPL=QS(Prisk;α,β,γ,δ)
(20)
值得注意的是,稳定分布的相加稳定性要求所有随机变量的特征指数α相同,因此在对每个卫星的测距误差进行处理时,可以指定α参数相同并取值为所有卫星测距源估计得到的所有α值的平均值。此外,由于在参数估计过程中σ和δ的估计和α、β相互独立,所以不同卫星的α参数的变化不会影响β和δ的值。
3 实验验证及分析
3.1 实验流程
分别采用仿真数据和实验数据对于上述理论进行检验。实验流程如图3所示,步骤如下:
步骤 1获取卫星星历并解码卫星信号,计算仰角、用户位置和卫星位置等信息;
步骤 2载波平滑伪距[28],并计算每个卫星的伪距校正信息;
步骤 3根据采样时卫星和用户的信息计算G矩阵和W矩阵,并根据可见星的数目确定采样时刻对应的S矩阵;
步骤 4对于误差模型,建立稳定分布并选用最大似然估计法进行参数估计,将估计得到的参数进行加权以得到定位域中的参数[29];
步骤 5进行分位数及PL计算。
3.2 模拟数据仿真结果
基于图3流程,对GBAS单个历元的误差进行蒙特卡罗仿真[30],其中测距误差模型使用了航空无线电技术委员会DO-245A标准,通过设置不同的可见星数目,得到高斯包络与稳定包络计算的PL对比如图4所示。
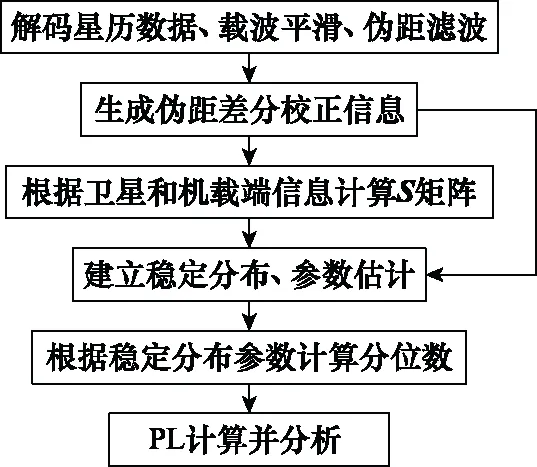
图3 实验流程图

图4 模拟数据仿真结果
可以看到在不同的可见星数目的情况下,PL有较大的波动,但稳定包络理论计算的保护级始终比高斯包络法计算得到的PL更加精确,消除了高斯包络过于保守的问题。
如图5所示,通过稳定分布计算的VPL(粉红色线条)在5.4 m左右,高斯分布计算的VPL则在5.8 m左右。通过对比可以看出,使用稳定分布包络的PL计算方法提高了导航系统的完好性。

图5 垂直保护级计算结果
3.3 实验数据计算结果
使用多个接收机模拟GBAS地面站以及机载系统,测量得到一段时间内的星历数据以及观测数据并对数据进行处理,对稳定包络的计算方法进行评估,分别使用两参数与四参数的方法计算VPL。
通过实验,可以得到如下的散点图及其局部放大图(见图6和图7),图中色温越高的地方样本密度就越大,结果表明在过程中未出现定位误差大于PL的状况,证明误差都被完美包络在保护级内。

图6 稳定包络保护级散点图

图7 高斯包络PL散点图
使用3种不同的包络模型在一段连续时间内的计算的保护级如图8所示,在99%置信度下使用3种方法计算得到的PL均值如表1所示。结果表明两参数与四参数稳定包络理论计算得到的保护级更加精确,解决了高斯包络法计算PL时过于保守的问题。

图8 PL与定位误差

表1 通过3种分布计算的VPL
通过选取了第200组的加权参数估计的结果来进行比较,结果如表2所示,稳定分布的尾部分布情况如图9所示。结果显示四参数稳定分布包络的尾部相比两参数包络的更厚,更加符合PL计算环境的实际情况,更精准地描述了误差样本。同时,由于四参数稳定包络理论中新加入参数β和δ的特性,不但解决了在高斯包络理论中误差样本“厚尾性”的问题,还解决了在两参数稳定包络理论中误差样本存在的“不对称性”“非零均值”的问题。

表2 两种理论估计得到的参数

图9 稳定包络概率密度
4 结束语
本文使用一种稳定分布替代高斯分布包络GBAS系统误差的方法,通过模拟数据和实验测量数据对于稳定包络算法进行了验证。结果表明,多参数稳定包络理论解决了高斯包络理论计算过于保守的问题,且在同样的计算复杂度下提高了GBAS系统的PL计算精度和完好性。此外,四参数稳定分布相比于两参数还具有更好的包络效果。在下一步的工作中将致力于将稳定分布与多星座、多频率导航系统完好性进行更深度的结合,探索在更少计算复杂度的情况下提升系统完好性的方法。
