限界侵限检测方法研究与应用
2021-04-12赵鑫欣孙淑杰王凡刘俊博杜馨瑜程雨
赵鑫欣 孙淑杰 王凡 刘俊博 杜馨瑜 程雨
(中国铁道科学研究院集团有限公司基础设施检测研究所,北京 100081)
随着高速铁路的修建与运营,铁路线路设施不断改进更新,一些高站台的改造、修建及隧道的整修等施工中出现了不符合标准轨距铁路建筑限界规范的情况,极大地影响了行车安全。为了确保列车安全运营,安装在车载平台的限界检测系统成为评估铁路运输安全和运营维护的重要手段和指标,其检测结果可以直接反映线路及周边建筑物的状态信息,为线路维修和运营提供科学依据。
基于激光扫描测量原理的车载非接触式限界检测系统[1-5],容易受外部检测环境的影响,致使限界检测分析输出较多侵限检测误报,需要进行大量人工复核工作。因此,须要对线路限界状态进行自动化和智能化动态检测。本文提出一种基于聚类分析和图像处理技术的限界检测智能分析方法。
1 线路限界检测系统原理
线路限界检测系统由数据采集子系统、数据分析子系统和数据管理子系统构成,如图1 所示。线路限界检测系统以激光扫描测量技术为基础,在车头位置安装高精度激光传感器。当检测车高速运行时,实时获取铁路建筑限界及周边建筑物的空间位置信息。首先基于钢轨表面的基准坐标系建立二维建筑物断面轮廓,然后通过图像处理算法实现建筑物侵限状态的聚类分析,同时设计多断面分析模型,实现铁路建筑限界的快速自动侵限检测。
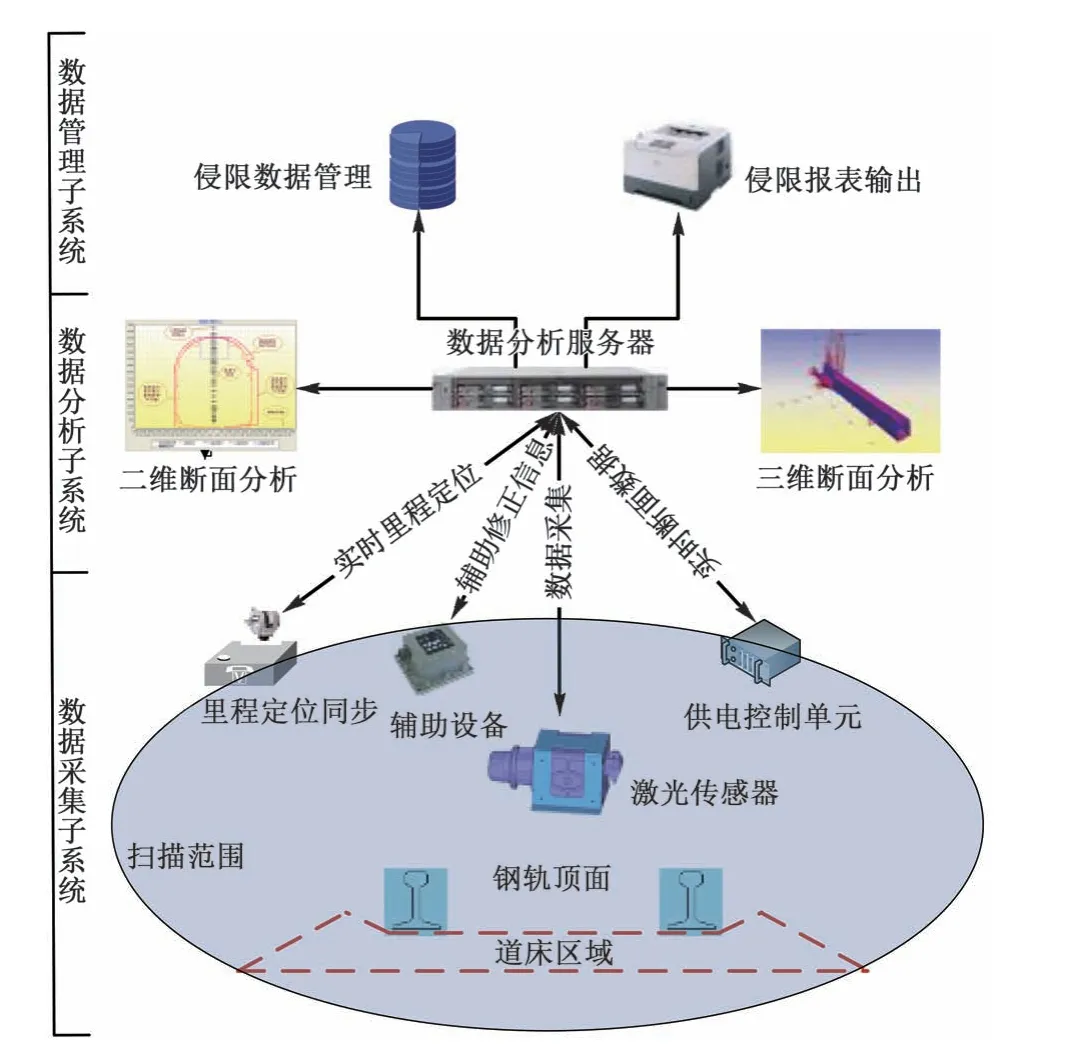
图1 线路限界检测系统结构
数据采集子系统完成高速运行检测下的铁路建筑限界及周边建筑物断面轮廓数据实时采集与存储。由于每个轮廓断面数据规模较大,设计基于多缓冲机制的大规模数据实时处理算法,同步检测速度、里程等信息,通过数据采集卡和异步传输模块可以实时显示建筑限界轮廓,如图2所示。其中,绿色表示非侵限数据,红色表示侵限数据,蓝色表示限界侵限标准轮廓。
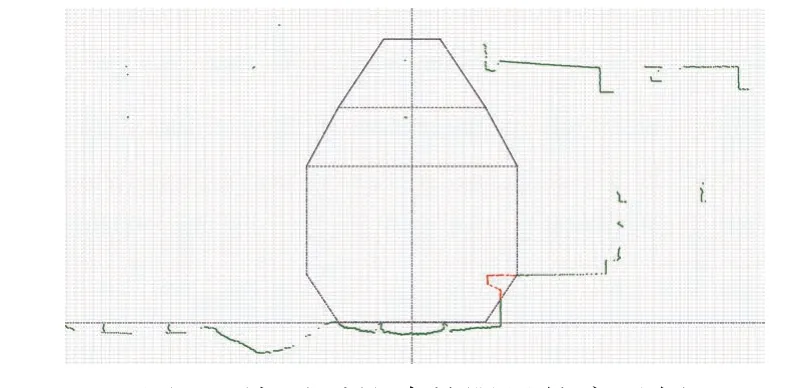
图2 检测到的建筑限界轮廓示例
数据分析子系统主要实现断面轮廓数据分析与侵限检测。首先根据轨面、车体和传感器坐标转换模型完成数据预处理;然后基于聚类分析与图像处理技术提取断面中所有轮廓特征;最后通过侵限判别算法自动输出建筑物侵限、断面轮廓和综合最小建筑限界结果,基于三维点云建模技术生成三维立体图(图3),能够展示线路周边建筑物的三维轮廓。
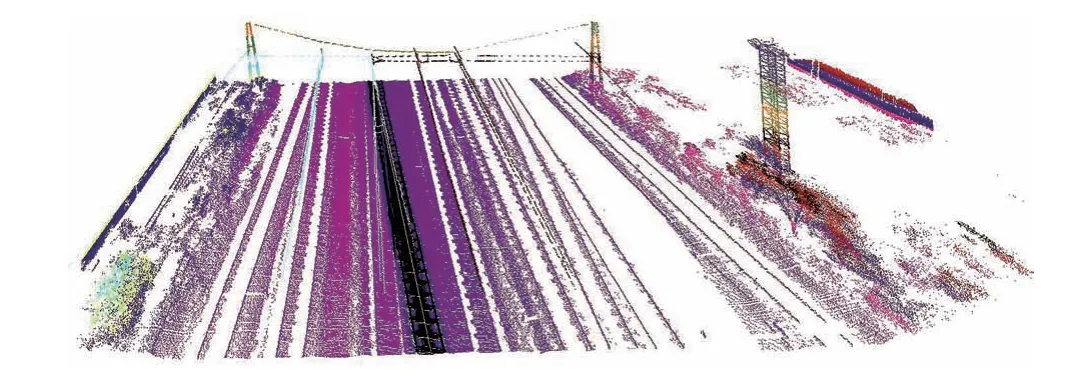
图3 三维断面轮廓示例
数据管理子系统实现限界数据编辑和侵限报表输出,建立限界数据管理机制,可以指导检测人员根据侵限结果进行现场养护维修。
2 侵限检测方法
现有侵限检测方法主要有横断面法、轨迹法和综合断面法。横断面法是一种人工定位测量断面法;轨迹法根据捕捉测量点的运动轨迹进行测距;综合断面法是检测过程中的一种定高测量法。上述检测方法只适用于低速检测,甚至需要人工参与检测。随着激光扫描技术和图像处理技术的发展,基于传感器采集的建筑物断面轮廓数据,利用点云聚类分析与图像处理判别技术完成侵限自动检测,可以大幅提高检测效率,目前已在线路检测维护中得到广泛应用。
限界检测系统采集到的原始数据为点云数据。根据TB/T 3308—2013《铁路建筑实际限界测量和数据格式》[6],以轨面为测量基准时,在垂直于线路中心线的断面内测量建筑物和设备的内轮廓点(最近点、最高点、最低点三者其一)距两轨顶连线的垂直高度及距垂直平分两轨连线的直线距离,动态测量偏差不大于40 mm,检测横断面间隔不大于0.5 m。
根据检测车测量允许偏差要求,本文提出一种基于聚类分析和图像处理算法的侵限检测方法,包含聚类算法模块和侵限干扰过滤算法模块。本文算法流程如图4所示。
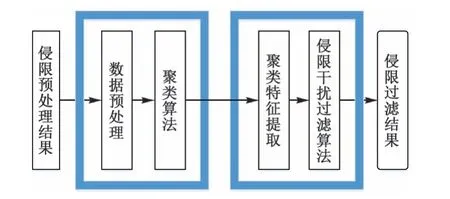
图4 基于聚类分析和图像处理算法的侵限检测流程
2.1 聚类分析算法
聚类分析算法[7-9]是一种非监督学习算法,作为常用的数据分析算法应用于很多领域。利用聚类分析,通过将数据分簇,可以比较清晰地获取断面轮廓数据信息。由于传感器采集的断面数据密度分布不均匀且存在外部环境噪声,选取基于密度的聚类算法(Density-Based Spatial Clustering of Applications with Noise,DBSCAN),先扫描断面全部数据点,如果数据点的ε邻域内点数目大于核心点阈值,则将其纳入核心点列表并形成对应的临时聚类簇。对每个临时聚类簇检查其中的点是否为核心点,如果是,则将该点对应的临时聚类簇和当前临时聚类簇合并,得到新的临时聚类簇。继续对剩余的临时聚类簇进行相同的合并操作,直到全部临时聚类簇被处理。聚类结果中不同颜色的点表示不同聚类,如图5所示。
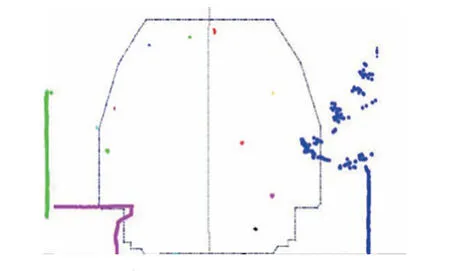
图5 聚类结果示例
相比传统聚类分析方法如基于划分的K-means算法和层次聚类算法,DBSCAN 算法可以获得更高的执行效率和更好的聚类效果。DBSCAN算法不用事先指定类的数目,可以发现任意形状的类,能找出数据中的噪声,且对噪声不敏感,聚类结果不依赖于节点的遍历顺序。
2.2 侵限判别方法
根据聚类分析结果,分析限界采集数据的聚类特征和状态变化,判断是否为侵限。侵限判别方法步骤为:首先从每个聚类的离散空间点集中抽象出其直观形状,即提取出所有平面离散点集的聚类轮廓;然后计算其轮廓特征;最后按照侵限条件及相邻帧状态变化情况,判断该聚类侵限状态。
2.2.1 轮廓提取
侵限判别方法基于有效聚类区域的轮廓提取。轮廓提取[10]须要遍历聚类内每两点连线,判断该线段是否在轮廓边界上,直到找到所有边界线段为止。根据上述轮廓提取算法,可以准确提取限界侵限数据中的站台、线路环境和外部环境干扰轮廓。聚类轮廓结果如图6所示。
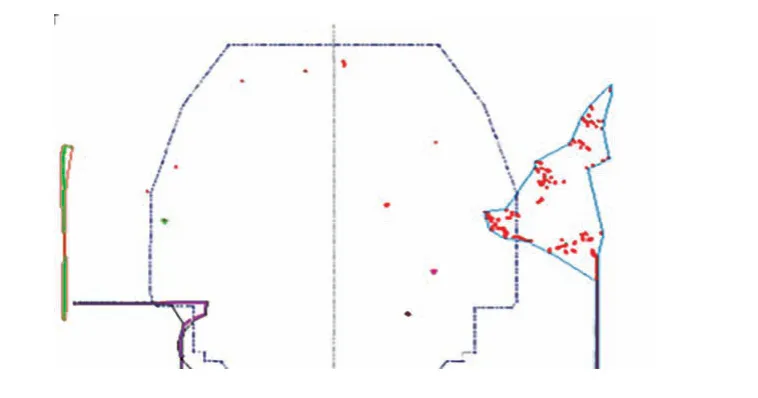
图6 提取聚类轮廓结果示例
2.2.2 侵限判别
根据每个聚类轮廓提取结果可以计算轮廓特征,包括面积和质心。按照侵限判别定义,计算轮廓面积是否大于侵限面积阈值。如果是,则为侵限聚类;否则要判别与相邻帧间聚类轮廓的质心位置关系,直到判别出所有侵限聚类为止。该侵限判别包含两个阈值参数:最小聚类轮廓面积Amin和相邻帧中同属类的质心移动距离MD。侵限判别算法流程如图7 所示。其中,MD1表示前一帧聚类质心的位置,MD2表示当前帧聚类质心的位置。
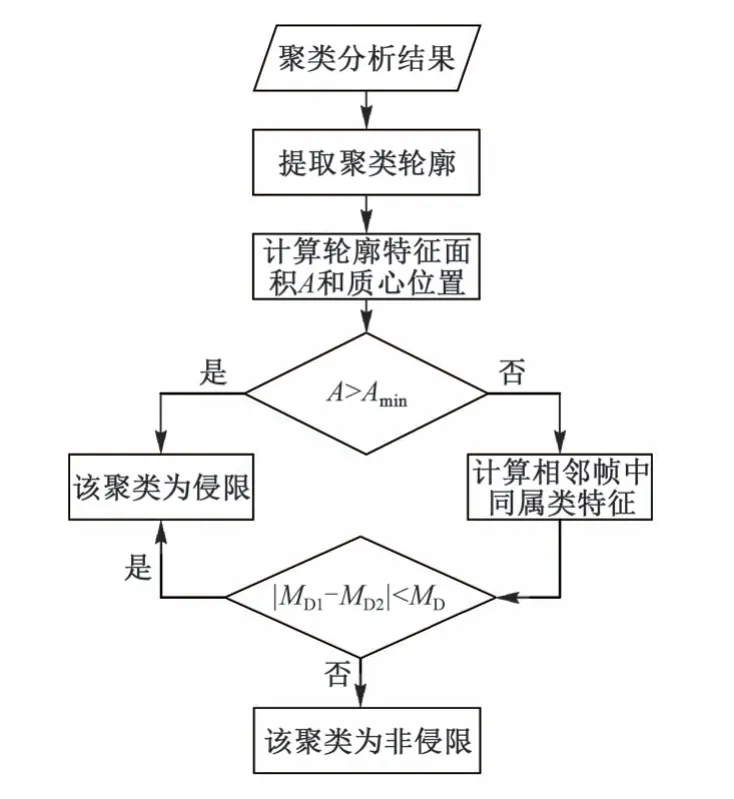
图7 侵限判别算法流程
该判别算法相对现有算法有两个显著优势:
1)适应能力强。该算法对外部环境变化和采集数据变化不敏感,可以将不同物体分别聚类并判别侵限状态,具有较强的适应能力。
2)准确率高。该算法选取相邻帧状态变化作为判别条件,提高了复杂场景的检测准确率,侵限分析处理时间小于4 ms。
3 应用验证
在综合检测车运行情况下,运用限界侵限检测系统,结合本文侵限检测方法对国内某线路进行检测,对侵限判断结果进行准确性评价,以限界分析结果作为标准计算每一张图片的准确度。准确率是给定数据集中分类正确样本个数和总样本数的比值,即

式中:STP是将侵限预测为侵限的样本数;SFN是将侵限预测为非侵限的样本数;SFP是将非侵限预测为侵限的样本数;STN是将非侵限预测为非侵限的样本数。
将传感器采集数据分为三类:密集点云数据、稀疏点云数据、跨限界临界区数据,分别包含340936,163524,198582 张图片。利用本文算法进行检测,并与现有侵限判别算法的检测结果对比,如图8 所示。其中红色矩形区域为侵限检测结果。
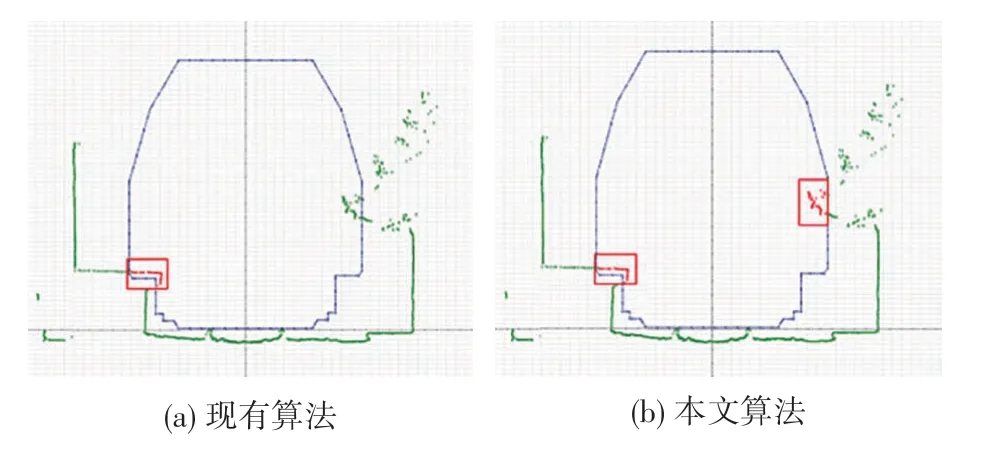
图8 两种算法检测结果对比
由图8 可以看出,现有侵限判别算法容易受到异物和外部环境干扰,将侵限异物判别为非侵限。将离散点聚类误判为侵限会直接影响限界侵限分析结果的准确性。将非异物判为异物,需要大量人工复核工作,容易造成误判。基于聚类分析和图像处理技术的侵限判别算法可以将不同离散点进行聚类,再提取每个聚类的轮廓特征,最后通过图像处理算法判定侵限状态,有效克服了外部环境干扰,实现了自动化和智能化动态检测,准确率更高。
分别对三类数据进行算法验证,并对侵限检测结果进行准确率评价,见表1。
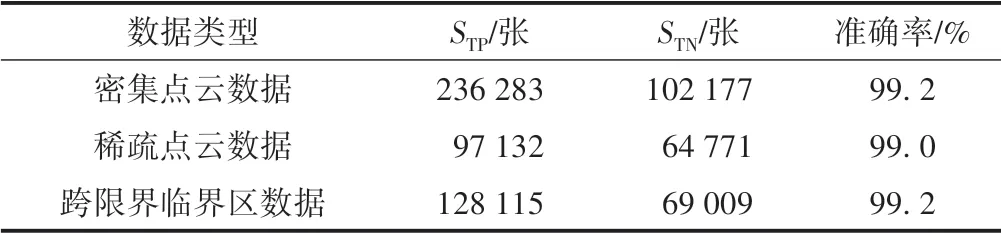
表1 侵限判别算法结果统计
从表1可以看出,侵限判别算法平均准确率不小于99%,而现有算法准确率为84%,本文算法平均准确率提高了15%。从准确性和泛化性角度,本文算法充分考虑不同异物侵限的聚类特征,并根据相邻帧状态变化作为侵限判别条件,可以适应不同异物侵限和外部环境,具有良好的泛化性。
4 结语
本文提出了一种车载非接触式的限界异物侵限检测分析方法,并在实际检测线路成功引用,实现了限界异物侵限的快速和准确检测。该方法有效克服了外部环境的影响,同时兼顾了检测实时性要求,准确率达到99%,算法执行时间小于4 ms,可以满足综合巡检车以最高120 km/h的速度进行检测。