Indra雷达近场假目标分析及抑制
2021-04-09徐晓强
徐晓强
(民航云南空管分局,云南 昆明 650200)
0 引言
随着我国民用航空事业迅猛发展,航班流量日益增长,在准确判别航空器所处位置的条件下缩短飞行间隔是民航空管的核心问题,这对民航监视设备的性能提出更高要求。伴随着空域内航空器日益增多,航管二次雷达运行中会出现更多假目标。快速判别假目标类型及成因,采取有效措施抑制假目标,对提升民航监视信号质量和保障空中航空器安全具有非常重要的意义。
1 二次雷达假目标种类
1.1 多径传播
航管监视二次雷达大多数假目标是因多径传播因素造成。多径传播是指航空器应答机与雷达询问机之间存在多条信号路径的现象[1]。如图1所示,多径传播按反射路径和直接路径间隔分类,可分为3种:一是地面反射信号和直接路径信号在同一垂直平面内,如图1-A所示,两路信号重叠,信号可能发生叠加,导致信号幅度及脉宽均产生变化,此情况称为交织黏连;二是因地面倾斜、建筑物或山体造成反射信号和直达信号与间存在小水平夹角,如图1-B所示,会引起信号脉宽及编码值变化,这两种情况会出现方位误差或编码错误;三是图1-C中,因地面倾斜、建筑物或山体造成反射信号和直达信号为大水平夹角时,会出现反射假目标。

图1 多径传播三种情况
1.2 旁瓣影响
航管二次雷达天线辐射除主瓣外还有众多旁瓣。《空中交通管制二次监视雷达设备技术规范》中规定旁瓣增益低于主瓣27 dB,尾瓣增益低于主瓣30 dB。[2]但航空器与雷达距离短时,因空间衰减不大,旁瓣辐射能量能触发航空器应答机断续或连续应答。雷达系统接收这些应答信号时以天线瞄准轴为方位基准处理,从而出现目标方向判断错误,显示终端可能显示同一个目标成不连续圈状弧线,此现象称为绕环效应。
航管二次雷达系统使用旁瓣抑制技术解决旁瓣影响,主要有接收旁瓣抑制(RSLS)和询问旁瓣抑制(ISLS)两种。
1.3 二次环绕
二次环绕是指本次询问产生的航空器应答落入下一询问周期,且该应答脉冲和下一询问脉冲同步稳定。发生二次环绕时,目标距离计算会使用第一周期应答与第二周期询问的时间差,因时间差值变小而产生近距离假目标。脉冲重复频率交错是解决二次环绕的常用方法。
1.4 异步干扰
覆盖范围内接收到其他雷达询问引起的应答信号而产生的假目标,因应答信号和其询问不同步,被称为FRUIT即异步干扰(Fal se Repl ies Unsynchronized In Time)。
异步干扰与真实应答和间的区别如下:一是异步干扰的假目标一般位于受干扰雷达旁瓣位置; 二是异步干扰应答信号在相邻扫描周期内位置上是独立、分离、且互不相关的,真实应答为距离相关。综上所述,抑制异步干扰可使用接收旁瓣抑制(RSLS)、相邻周期距离相关等方法。
1.5 假框架目标
多架航空器位置相近时,多个应答信号会出现迭加,产生多个应答框架间距小于20.3 μs的应答信号,该现象称为应答码混淆。应答码混淆可分为假框架目标、交织应答和同步窜扰。脉冲间隔为20.3 μs但框架脉冲并不由F1和F2组成,雷达系统误判而造成的假目标假目标,称为假框目标或幻影目标。交织应答现象为应答脉冲位置互相不占用但脉冲有重叠,应答脉冲位置相互重叠并且占用称为同步窜扰。
应答码混淆现象可用单脉冲技术和S模式解决:单脉冲技术雷达通常能解出4组交织应答代码;S模式雷达中的选呼模式,根据航空器惟一地址码进行询问,对应航空器应答,其宇航空器不应答,实现完全区分混淆应答。
1.6 其他原因
航管二次雷达系统旋转铰链性能不佳、方位编码不准确时,会影响雷达方位信号(ARP / ACP信号),目标会出现位置偏移。该类假目标不会单个出现,会成大批次出现。
2 近场假目标现象描述
该雷达站位于昆明机场西侧,两者间直线间距约为4.5 km。机场处于云南某雷达站二次雷达低俯角,台站海拔高度为2 420 m,机场海拔高度为2 050 m,两者间高差为347 m,可得目标与雷达站的垂直夹角约为4°24'。
2019年3月,云南某雷达站Indra二次雷达由A/C模式切换至S模式工作,切换后跑道覆盖得到提升。次日该站雷达出现2次航空器降落时在跑道端头发生位置偏移,出现时刻其余航空器位置正确,与自动化终端核实其他能覆盖跑道的雷达目标正常。
其中第二次较为典型,二次代码为3063的航空器在12:19目标在西跑道头航空器出现转弯超出跑道实际区域,转向雷达站方向,持续40 s左右,高度在6 800 ft以下,与机场跑道高度一致。如图2所示。

图2 目标2位置漂移出现转弯图
3 现象分析及处理
该雷达在A/C模式工作时,无此现象,排除异步干扰原因引起该假目标。具体观察该目标漂移假目标,与正常落地航空器无异常,无变短现象,可排除二次绕环。因出现假目标时雷达工作于S模式,可排除因假框架脉冲原因造成。漂移目标出现时其余航空器目标正常,由此可排除雷达编码器及旋转铰链问题导致该假目标。
两次假目标均出现位置漂移现象,且后一次目标漂移出现向台站转弯现象。现象与旁瓣影响造成的绕环效应对应。分析该假目标应为旁瓣收发引起。但此时雷达RSLS及ISLS功能为启用状态且其余航空器目标均正常,且其他时间位置相近航空器未出现该现象。由此分析可得此次旁瓣收发不是由Σ通道旁瓣穿刺Ω通道波瓣造成。
因机场附近跑道等建筑物多,易造成多径效应。该现象时应为直接路径信号与地面反射信号位于同一垂直平面,且Σ通道P1/P2/P6旁瓣询问脉冲电磁波与反射电磁波相位相近,形成叠加。因路径短反射与直射路径差未造成脉冲宽度明显变化。Ω通道P5脉冲电磁波与反射电磁波相位未相近,未形成叠加效果。造成P1/P2/P6与P5的差在9 dB 之间或以上,造成ISLS功能失效,航空器应答机进行应答。
同样因多径效应造成Σ通道(旁瓣)旁瓣接收应答信号与Ω通道控制通道信号幅度差不明显,未加载RSLS标识,而Σ通道(主瓣)信号因目标处于低俯角,如图3所示,信号减弱10 dB左右,Σ通道(主瓣)与反射信号相位差接近180°,信号衰减。未被处理或低于多径效应造成叠加后的Σ通道(旁瓣)信号强度,后期处理时被滤除。因该出现条件特殊,故此现象为偶尔出现。综上所述确定原因为多径效应引起的旁瓣影响造成了假目标出现。
通过以上分析,因机场区域建筑多,无法通过反射文件方式解决多径效应,决定从出现漂移目标均在近场及旁瓣影响两方面入手解决该问题:

图3 天线垂直辐射方向图
(1)因漂移目标为旁瓣进入目标信号远小于正常信号,又因均为近场出现。Indra二次雷达有STC 功能对近程信号实现衰减,提高STC设置可进一步衰减该信号降低处理概率实现滤除目的,对越近目标衰减越大。过程中将该雷达站STC设置值由1调整至2,如图4所示。调整后观察远距离目标未出现影响,调整后出现位置漂移现象出现频次下降且目标为断续出现,漂移目标丢点数较原现象明显增加。调整过高后有可能影响雷达覆盖,该功能未在上调。
(2)针对旁瓣影响,Indra雷达可用Ω通道偏执设置功能实现P5脉冲幅度增加,如图5所示。该功能可增强ISLS及RSLS功能判别能力,原雷达站Ω 通道偏执设置为0,将该设置值增加为3后,该现象再未出现,对比其他站点雷达信号,该雷达站远近场目标均无异常,实现排除假目标目的。
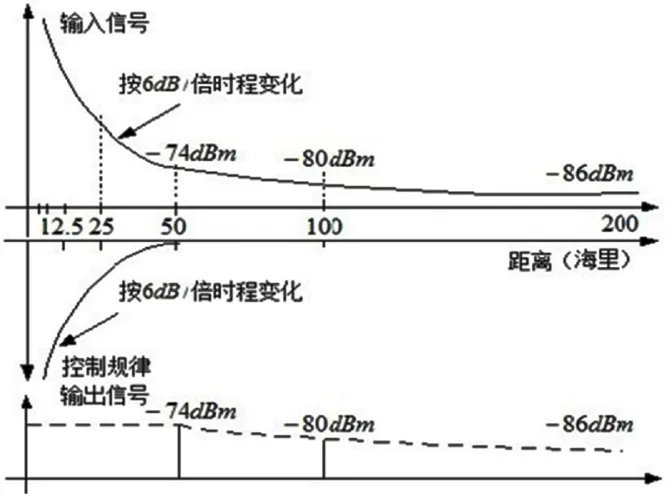
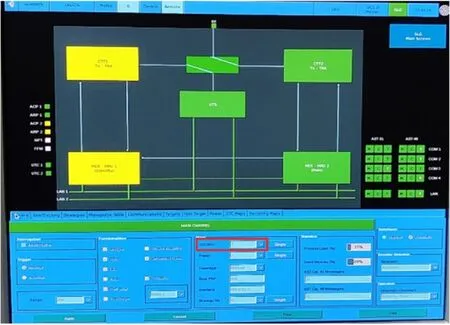
图4 STC曲线及Indra STC调整位置图
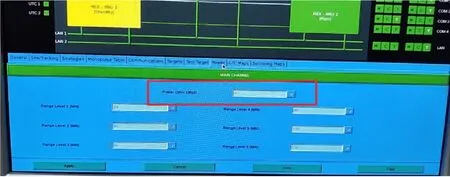
图5 Indra控制通道偏执调整位置图
4 结束语
上述二次雷达假目标分析中,首先,要确定假目标的性质,针对假目标现象逐一核对,确定引起假目标出现的原因;其次,针对造成原因制定排除思路,同时熟练掌握使用雷达各种设置,实现排除假目标;最后,要核对是否因采用举措是否影响其他雷达目标,为二次雷达假目标排除提供了整体思路,有一定借鉴意义。