枢纽机场航站楼内低成本连续定位优化方法
2021-04-07王建伟上官伟蔡慧敏冯瑞霞
王建伟, 上官伟, 蔡慧敏, 芮 涛, 冯瑞霞
(1.北京首都国际机场股份有限公司 信息科技部,北京 100621; 2.北京交通大学 电子信息工程学院,北京 100044)
目前,国内外机场在信息化与智慧化建设方面进入了快速发展阶段,人们生活水平不断提高,对出行方式的选择和出行效率的要求也越来越多,为了更加高效,越来越多的旅客选择飞机这种出行方式,从而推进了我国航空业飞速发展。国内各地机场正在进行扩建,航站楼内往往建筑面积巨大并且结构复杂,随着航站楼的不断扩大,航站楼内建筑、商铺和登机口也越来越多,对于一个对机场不熟悉的旅客而言,能够在机场航站楼内快速准确地办理好登机手续并按时登机是十分重要的,因此旅客对机场航站楼内的位置服务的需求越来迫切,近年来学术界和工业界的科研人员都在广泛关注。
在机场环境下,无线信号的传播会受到多种元素的影响,尤其是周围环境因素的影响,如温度、障碍物、人体走动等因素。目前蓝牙信号在机场航站楼内的复杂环境中受到影响较大的是多径效应、障碍物、长距离传输和周围的人员走动等。多径效应是指无线信号在航站楼内传播的过程中,由于航站楼内障碍物的存在,会出现吸收、反射、衍射、散射等现象[1]。除了多径效应对无线信号的传播的会产生影响外,周围人员的走动也会对其有影响,通过对前人学者的研究内容进行学习可知,当辐射频率与人体[2]的固有频率谐振时,吸收能力最强,即谐振吸收,在接收信号的时候,旅客手持移动端的角度、方向都会影响到蓝牙信号的接收。由于旅客背对着基站,接收到的蓝牙信号会经过人体后会出现削弱的情况,使得接收端接收的信号数据有所衰减。
目前在国内,多数的研究人员利用机场航站楼内部署的无线设备对基于无线网络的定位技术[3]进行研究,并进行验证。有人提出针对航站楼内特定的环境来进行人员的定位,主要是利用无线网络,通过研究目前的空中无线信号传播模型[4],在此基础上为其设计了一种基于RSSI测距的定位方法,在RRSI测距的基础上利用PS0算法进行优化,以可以实现在不增加无线网络硬件的基础上进一步增加定位的范围和适时提高定位精度;王忠明[5]针对机场候机楼室内的环境对无线网络技术做进一步的研究,为了可以较好地解决机场候机厅内AP部署的位置高这一原因而导致的最后定位精度低的问题,提出了一种改进方法,该方法主要利用最小二乘算法来对空间中无线信号传播模型中参数的进行求解,然后再采用最小均方差法来实现三维定位;还有人通过对无线局域网和信号强度的定位技术的深入研究[6],为了可以降低在候机大厅中旅客走动对定位结果的影响,提出一种集合和加权径向基函数相融合的定位方法。
但是到目前为止,虽然针对机场航站楼内这一特殊环境下的定位技术已经有不少学者进行了研究,并且提出了许多的室内位置估计方法并得到了验证,目前智能服务设备也部署在机场航站楼内,但大多数为固定智能服务终端[7],智能移动终端的服务设备还没有真正的在机场内得到应用,更多的是处于研究阶段。航站楼内的蓝牙信号在传播过程中会受周围障碍物影响,并且存在人员流动的情况,因此针对航站楼这种特定环境的特点进行分析,设计了航站楼内低成本连续定位优化算法,开发航站楼内定位软件并对提出的定位优化算法进行实验验证和结果分析。
1 方法框架
1.1 iBeacon在航站楼内定位特性分析
iBeacon最开始是发布在移动设备OS上配备的新功能,它的工作方式是配备低功耗蓝牙4.0(BLE)通信功能的设备[1],可以使用BLE技术向周围发送自己特有的ID,接收到该ID的应用软件会进行下一步行动。iBeacon采用的是BLE技术,只要是支持该技术的设备都可以接收到,Bluetooth设备工作在全球通用的2.4 GHz的ISM(Industrial,Science and Medicine)频段。每一个iBeacon基站都有自己的信号传输范围,蓝牙信号的传输范围可达50 m,当移动端进入到iBeacon基站的蓝牙信号覆盖范围时,在移动端可以接收到iBeacon基站相关信息,根据蓝牙信号强度进行处理。虽然蓝牙有效的传输距离一般是几m到几十m[8],但是在实际应用中,在采集到蓝牙信号后对数据进行处理时,需要考虑多种因素。在处理过程中,要在确定远距离连接的蓝牙信号稳定时,才能确定接收到的蓝牙信号数据可用。
蓝牙信号会因航站楼内的障碍物而产生反射、折射等现象,使得信号衰减,因此随着RSSI信号强度数据采集设备与基站之间距离的不断增加,采集到的RSSI数据的误差也随之越来越大。通过设置蓝牙基站,并分别在距离蓝牙基站1 m,2 m,…,10 m的地方放置采集移动端,在同一位置采集20次后求其均值,得到表1中的结果。
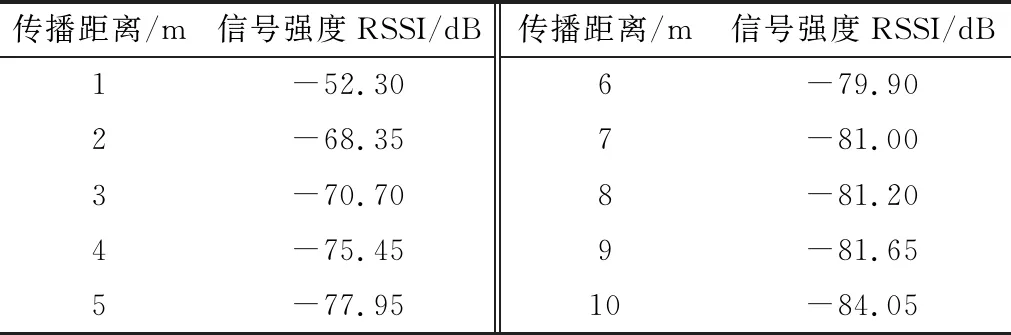
表1 RSSI采集值
由表1可知,移动端和蓝牙基站标之间的距离越短,采集到的蓝牙信号强度则越高,在后续的定位应用中得到的结果越精准,但是在部署好蓝牙基站后,由于蓝牙基站之间会有一定的距离,在实际应用时,蓝牙基站之间的距离并不能保证是较近的,可以采集较强的蓝牙信号强度来进行定位,存在所处位置距离周围的蓝牙基站的位置都较远的情况。当还未进入iBeacon基站覆盖范围时,采集到的蓝牙信号强度数据就比较弱甚至数量不足以支持通过基于RSSI测距模型来实现定位。以上的场景被视为弱场环境。
1.2 航站楼内低成本连续定位方案
作为我国的枢纽机场,机场航站楼环境复杂,无线信号在传播过程中会由于周围障碍物的存在和人员的影响产生多径效应,另外存在其他无线信号、电磁波的干扰,另一方面由于枢纽机场的旅客吞吐量大、机场航站楼内多出现人员流动的情况,无线信号在传播过程中会受到干扰,使得旅客接收端接收到的无线信号与实际的无线信号值差距较大。因此在基于机场航站楼内已部署的iBeacon基站中,由于产生的多径效应,多数情况下会出现断点的情况,在进行静态定位时可以达到较为精确的效果,但是在旅客行走过程中进行动态定位时则会出现各种情况。由于蓝牙信号自身的特性和智能移动端采集信号需要一定时长的影响,会出现断点弱场的情况,使得在进行定位时得到的位置经常是不连续的,并存在一定的误差,与实际位置相差较大,因此基于枢纽机场航站楼内断点弱场环境下采用的是基于EKF(Extended Kalman Filter)的融合定位算法。由于机场航站楼内多出现人员流动的情况,在基于EKF的融合定位算法的基础上进行地图匹配算法进行融合,进一步改善机场航站楼内人员走动对旅客定位结果的影响,其定位方案如图1所示。
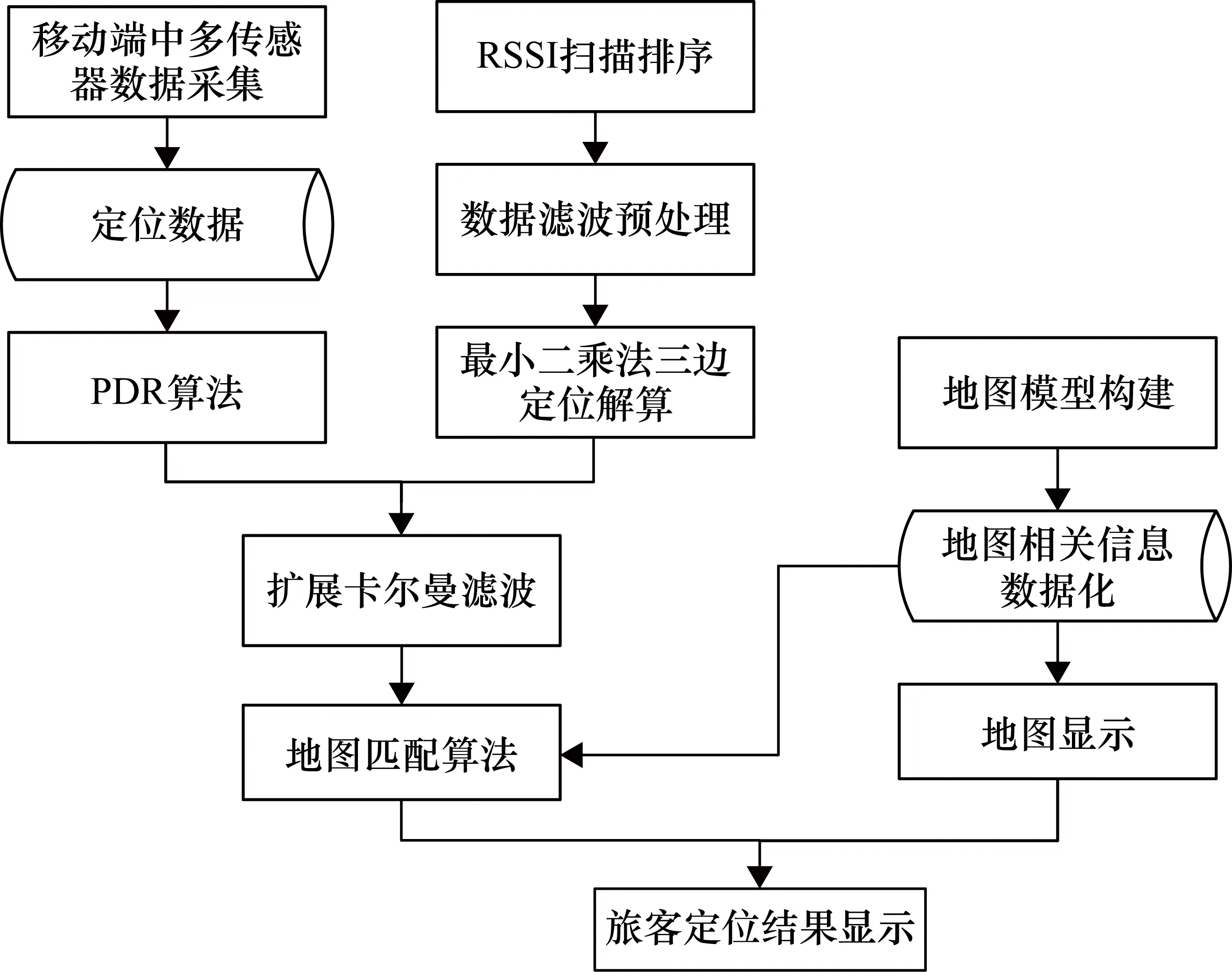
图1 航站楼内定位方案
在机场环境下,基于航站楼内复杂的环境,利用智能移动端内部传感器来实现PDR(Pedestrian Dead Reckoning)定位,以增强旅客在航站楼内连续定位性能,在航站楼内信号强度较弱的情况下,可以采用基于EKF的连续融合定位技术来弥补弱场环境下的定位,进一步提高航站楼内定位的连续性,通过地图匹配融合算法进一步提高定位精度。首先采集相关数据,利用智能移动端采集蓝牙信号强度、加速度等相关数据,通过滤波处理后,由基于EKF的连续融合定位算法得到定位结果,减少定位中因为信号强度弱而引起的误差。通过这种融合定位方法,可以增强旅客室内连续定位性能。将得到的定位结果进行进一步处理,和数据库中存储的数据化的地图信息进行匹配,进一步提高定位精度。最后调用地图服务器进行旅客的位置显示。
2 基于EKF和地图匹配的精准定位方法
2.1 基于EKF的连续融合定位算法
为了解决前述由于蓝牙覆盖范围使得定位越来越不连续的情况,采用基于扩展卡尔曼滤波的融合定位算法。PDR定位技术得到的旅客定位结果是连续的,得到的旅客位置信息不会出现突变的情况,但是误差会随着时间的累积而增大。基于iBeacon定位技术得到的位置坐标的精确度较高,但是由于采集到的蓝牙信号强度会出现跳变的情况,得到的结果是不连续的,定位不稳定,因此基于以上两种定位算法进行初步定位,其具体的融合定位方法流程图如图2所示,通过利用位移、方向约束来优化旅客位置,主要是利用iBeacon测距定位算法求得移动端的位置作为初始坐标,然后将位置坐标和PDR算法中的航向角作为扩展卡尔曼滤波的观测量得到更新后的状态。
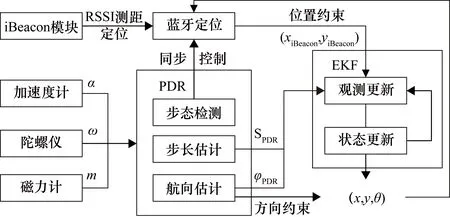
图2 航站楼内融合定位流程图
① 首先采集相关数据信息,包括蓝牙信号强度、蓝牙的名称和加速度传感器的相应数据,输出蓝牙列表并将所用的相关信息存储到SQLite数据库[9]中。
② 在利用iBeacon进行定位时,因为蓝牙RSSI信息在采集时会出现不稳定的情况,在进行实验时移动端越靠近iBeacon信标时,采集的信号强度越高,通过高斯滤波器将蓝牙信号强度进行预处理,使用最小二乘法对数据进行传播模型拟合。
③ 对蓝牙数据信息进行预处理以后,利用三边测距定位算法计算出移动端当前的位置坐标,并传递给PDR算法作为初始坐标。
④ 由于在进行实验时蓝牙信号强度有高低之分,因此需要对该时的场景进行判断,通过RSSI信号强度阈值来进行判断,在非弱场环境下即iBeacon的信号强度比较高的时候,采用iBeacon技术来实现定位功能;在弱场环境下即iBeacon信号强度较低的环境下或没有iBeacon信号的场景下,采用PDR融合定位技术,基于目前场速度位置信息、旅客的行进速度、时间和步长的历史信息,与iBeacon技术相融合进行定位。
⑤ 得到坐标后,更新目前的位置信息,并进行显示。
PDR技术可以通过移动端采集到比较准确的位移和航向角,可以提供相对的位置,实现优势互补。
系统的状态方程为
(1)
观测方程为
(2)
式中,wk,vk为相互独立的系统状态噪声和观测噪声,噪声的协方差为Q和R。在状态方程(1)中,xk,yk为第k时刻的位置坐标;φk为预测的航向角;xk-1,yk-1为第k-1时刻的融合定位坐标;Sk为第k-1时刻的步长和航向角的预测值;Δφk为估计得到航线角的增量。在预测方程(2)中,xk,yk分别为第k时刻通过iBeacon得到的位置坐标。
系统的先验估计为
xk=Φkxk-1
(3)
(4)
得到的卡尔曼增益为
(5)
更新系统的状态方程和协方差矩阵:
xk=xk+Kk(zk-Hkxk)
(6)
Pk=(I-KkHk)Pk
(7)
2.2 基于粒子滤波的地图匹配定位算法
地图匹配是指将旅客的走行轨迹和机场航站楼内数字地图进行匹配的过程,主要是应用在已知路径信息且路径比较简单的情况下,利用多传感器定位技术计算出的旅客位置,然后与地图信息中的路径、关键点、标注点等相匹配,进行位置纠正。本次采用基于粒子滤波的地图匹配算法。
粒子滤波[10]是结合抽样理论和贝叶斯估计的一种近似算法。主要是通过寻找一组在线状态空间传播的随机样本对概率密度函数进行近似,以样本均值代替积分运算,从而获得状态最小方差分布的过程,常用于解决非线性和非高斯性的问题。
该算法是以贝叶斯理论为基础,贝叶斯定理主要是通过观测信息来建立后验概率密度函数,并且由密度函数来对系统做出决策。主要是通过已知的先验概率利用贝叶斯公式来求解后验概率,最后进行决策。
贝叶斯公式如下:
(8)
式中,P(B)为事件B发生的概率;P(A)为事件A发生的概率;P(B|A)为事件B在已知事件A发生情况下的概率;P(A|B)为事件A在已知事件B发生情况下的概率。将P(A)称为先验概率,P(A|B)则是通过转化为的后验概率。通过贝叶斯理论可以实现机场航站楼内的位置跟踪,利用粒子滤波原理进行分析,其系统方程为
xk=f(xk-1,vk-1)
(9)
zk=h(xk,wk)
(10)
式中,xk为在第k时刻的系统状态,在本节表示的是第k时刻的位置信息;zk为第k时刻地图信息的观测值;vk-1为系统噪声;wk为观测噪声;f(),h()分别为状态转移函数和系统观测函数。它的初始概率密度为
p(x0|z0)=p(x0)
(11)
状态预测方程为
(12)
状态更新方程为
(13)
基于粒子滤波的地图匹配算法是将网络化的地图数据存入到SQLite数据库中,然后在定位的过程中,将航站楼内低成本的连续融合定位算法得到的位置坐标与SQLite数据库中的地图数据信息进行匹配,从而完成位置纠正。其具体的地图匹配算法如图3所示。

图3 基于粒子滤波的地图匹配算法
3 方法验证
3.1 航站楼内定位软件验证环境搭建
在航站楼内旅客定位软件中,最为关键的是旅客位置的确定,本设计中,其定位功能的整体框架结构如图4所示,主要由三部分构成:智能移动前端、后台运算和数据库。智能移动前端主要负责数据采集,接收到的iBeacon基站发射的蓝牙信号相关数据以及多传感器中的相关数据采集,通过后台的滤波算法将采集到的数据进行预处理及相关模型构建,将处理好的数据存储到SQLite数据库中,通过第3节所述的针对机场航站楼环境下的定位算法解算出旅客的位置信息,最后由智能移动端将位置坐标进行显示。
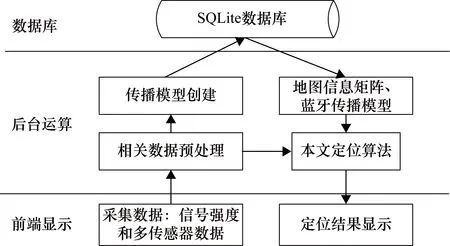
图4 定位功能的系统结构
在基于iBeacon的室内定位中,其基本原理是部署iBeacon设备在固定的位置,固定的iBeacon信标作为基站,发射蓝牙信号,而移动端在移动的过程中,通过接受到蓝牙信号,根据移动端距离iBeacon设备越远信号强度不断衰减[11]的特性,根据采集到的信号强度数据确定移动端距离iBeacon设备的距离,进而计算出移动端的位置信息,使用的硬件介绍如下。
移动设备:荣耀平板Android 9.0,内置加速度传感器、方向传感器、地磁传感器等本次实验所用的传感器,并且配置有支持蓝牙 BLE4.0芯片。
iBeacon基站:采用的是智石科技的ibeacon Smart蓝牙4.0基站,其主要参数如下
① 蓝牙模块:Nordic51822AA。
② 通信方式:BLE4.0。
③ 广播功率:-30~4 dBm。
④ 广播频率:100~10000 ms,默认800 ms。
⑤ 传输距离:3~100 m(半径)可调。
⑥ 支持设备:IOS7.0以上,Android4.3以上。
本次实验环境的选取应为可视的室内环境。以某机场T3航站楼内的一个走廊作为实验仿真环境原型,选取一个长为47.5 m,宽为35.8 m的仿真环境。在此环境中,部署10个蓝牙信标作为参考节点,分别为AP1~AP10,当设置蓝牙信标参数发射功率调到-4 dBm、发射间隔为417.5 ms时,蓝牙信标之间的间隔为6~10 m为最佳定位距离,因此在部署时保持相邻的蓝牙信标之间的距离约为6~9 m,本次在部署蓝牙信标具时,在拐点、交叉点的位置部署较为密集,在直线路径上较为稀疏,其具体部署情况如图5所示,其坐标如表2所示。
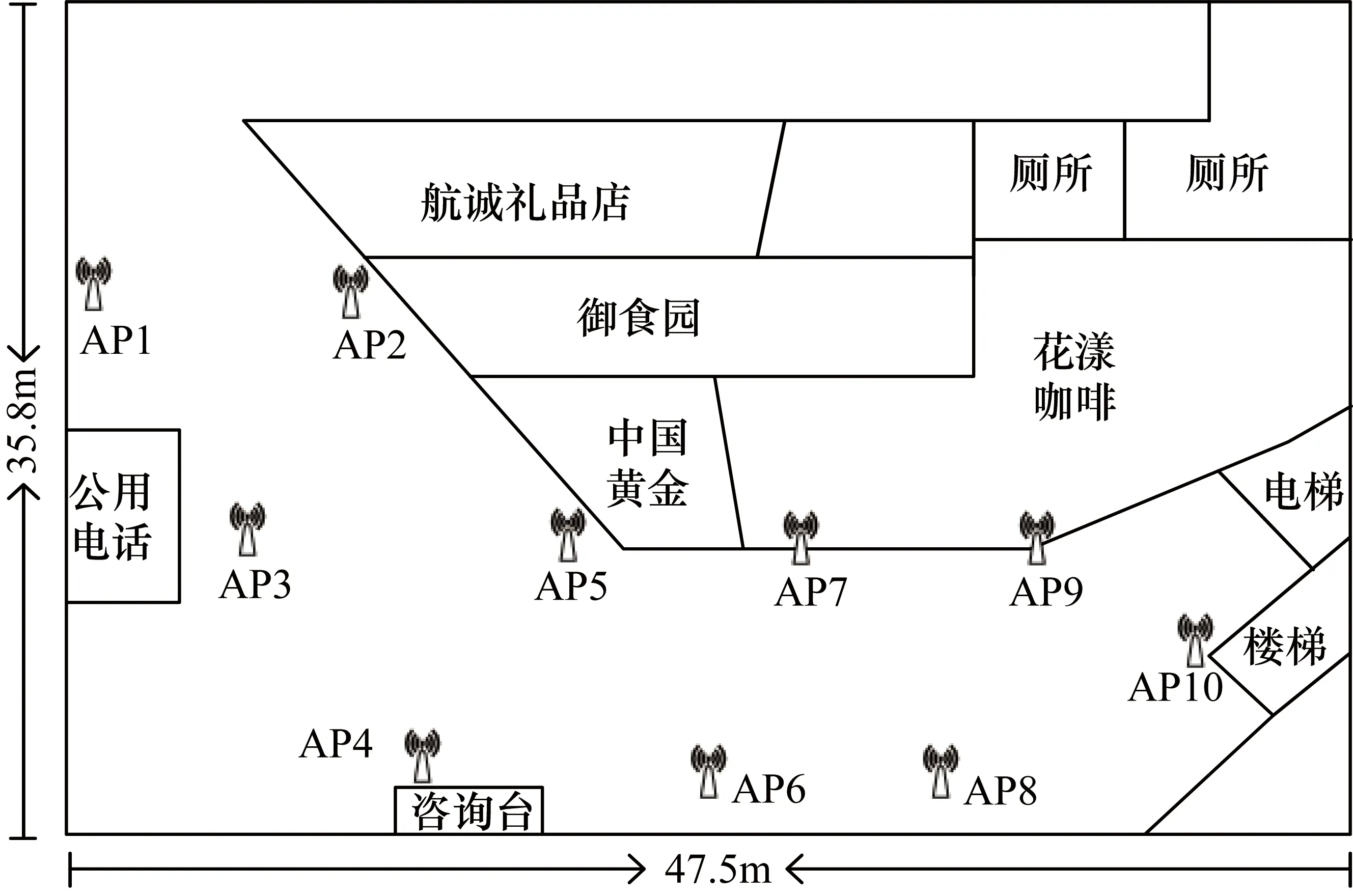
图5 某航站楼内部分蓝牙布置图
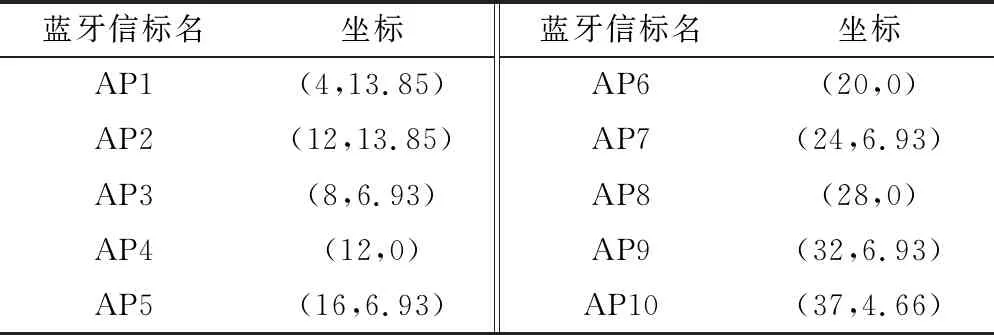
表2 蓝牙信标的相对位位置
3.2 单点定位结果分析
在实际应用的场景中,定位结果通常会受到周围环境的影响,例如环境中的障碍物、空气温度等物理因素,还会存在人员因素。人员走动对旅客定位精度有较大的影响。为了验证机场航站楼内周围人员走动对定位结果的影响,进一步对实际应用环境进行模拟实验,加入应用环境中可能出现的场景,进行定位误差结果分析。在实验地点选取两处分别进行多次实验,针对相同的物理环境下,有无人员走动对最后的定位结果进行分析。
在实验路段选取直线路径上交叉口较少的位置作为测试点1,在该测量点利用智能移动端测取多组数据进行分析得到图6。
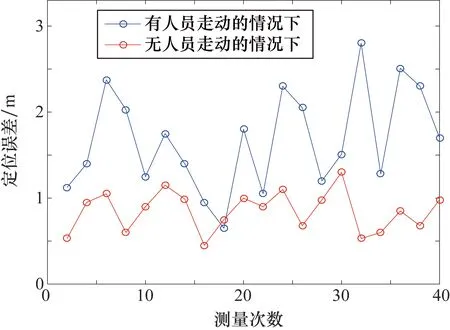
图6 测量点1处行人定位误差对比图
由图6可以看出,在周围环境因素相同的情况下,有无人员走动这一因素对最后行人的定位精度影响较大,在有人员走动时相较于无人员走动的定位精度普遍相对较低。在无人员走动时,得到的定位误差在0.5~1.3 m之间,定位误差均在1.5 m以下,约80%的定位精度是在1 m以内,定位精度较高,而在有人员走动时,得到的定位误差在1~3 m之间,在一定程度上人员走动对得到的行人定位结果的影响较大。
在实验路段选取拐点、交叉口较多的位置作为测试点2,在该测量点利用智能移动端测取多组数据进行分析得到图7。
由图7可以看出,同图6情况基本一致,在周围环境因素相同的情况下,在有人员走动时相较于无人员走动的定位精度普遍相对较低。在无人员走动时,得到的定位误差在0.5~1.5 m之间,定位误差均在1.5 m以下,约60%的定位精度是在1 m以内,定位精度相对较高,而在有人员走动时得到的定位误差在1~3 m之间,在一定程度上人员走动对得到的行人定位结果的影响较大。
对比图6、图7可以看出,不管是在直线路线点处还是拐点处,人员的走动均对最后行人的定位结果存在的较大的影响,在实验地点是直线路径上交叉口较少的位置时得到的定位结果较于拐点、交叉口较多的位置定位精度较高。
3.3 走行过程中定位结果分析
本节对仿真的结果进行了展示和分析,主要包括定位结果误差分析和多种算法定位结果的分析。本次是在实验环境中进行仿真实验,部署10个蓝牙信标并选取32个测试点来进行实验测试。通过对最后的定位结果来进行比较和分析可以看出,提出的航站楼内低成本融合定位算法和地图匹配算法结合对航站楼内的最后定位结果的精度有所改善。
通过智能移动端采集选取32个点作为测量点,在每个测量点测量30组数据,得到的定位结果误差数据表和定位算法误差对比图如表3和图8所示。

表3 定位结果误差数据表
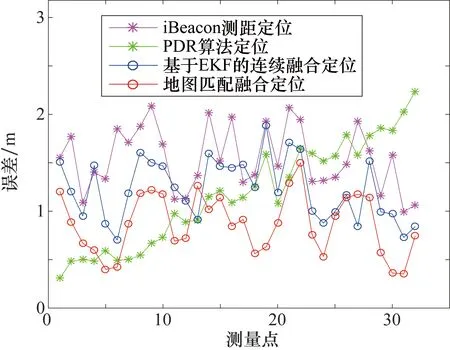
图8 多种算法定位误差对比图
由表3可知,地图匹配融合算法最大定位误差为1.5 m,平均误差为0.86 m,相较于单一的iBeacon定位算法、PDR算法、航站楼内连续融合定位算法在定位精度上都有显著的提高,较单一的iBeacon定位算法的平均误差减少了0.68 m,较单一的PD定位算法的平均误差减少了0.47 m,比航站楼内连续融合定位算法的平均误差减少了0.25 m。
由图 8可以看出,相交于单一的定位技术,设计的基于EKF的连续定位算法和地图匹配融合定位算法得到的定位精度较高。
为了可以更加直观地体现出在机场航站楼内地图匹配融合定位算法相对于前面介绍的航站楼内的定位算法的优越性,分别针对iBeacon测距定位、航站楼内连续定位和地图匹配融合定位进行了仿真,通过智能移动端采集相关数据并通过高斯-卡尔曼滤波进行滤波处理,利用不同定位方式得到旅客走轨迹的仿真结果如图 9所示,接下来对得到的定位结果进行分析。
由图9可以看出,地图匹配融合算法较航站楼内连续融合定位算法更加接近真实的轨迹,由于在航站楼内蓝牙信号的传播距离有限,距离蓝牙信标越远的地方信号衰减越厉害,定位精度和效果越偏离原来的轨迹,由于航站楼内各种环境的因素的影响,以及蓝牙覆盖范围有限的原因, 在距离蓝牙信标距离较远的地方,蓝牙RSSI值会比较小且由于采集数据需要一定时间,容易出现断点弱场的情况,此时利用智能移动端中的多传感器来对iBeacon测距算法进行位置校正,即在航站楼内使用连续融合定位算法对航站楼内的断点弱场环境进行改善。作为我国的枢纽机场,其旅客吞吐量大、机场航站楼内多出现人员流动的情况,因此采用地图匹配融合算法来进一步提高旅客在走行过程中的定位精度,减小人员流动对定位结果的影响。由图9可以看出,在实验人员走行过程中,在大部分测量点处,通过地图匹配融合算法可以有效地改善在航站楼内的定位误差。
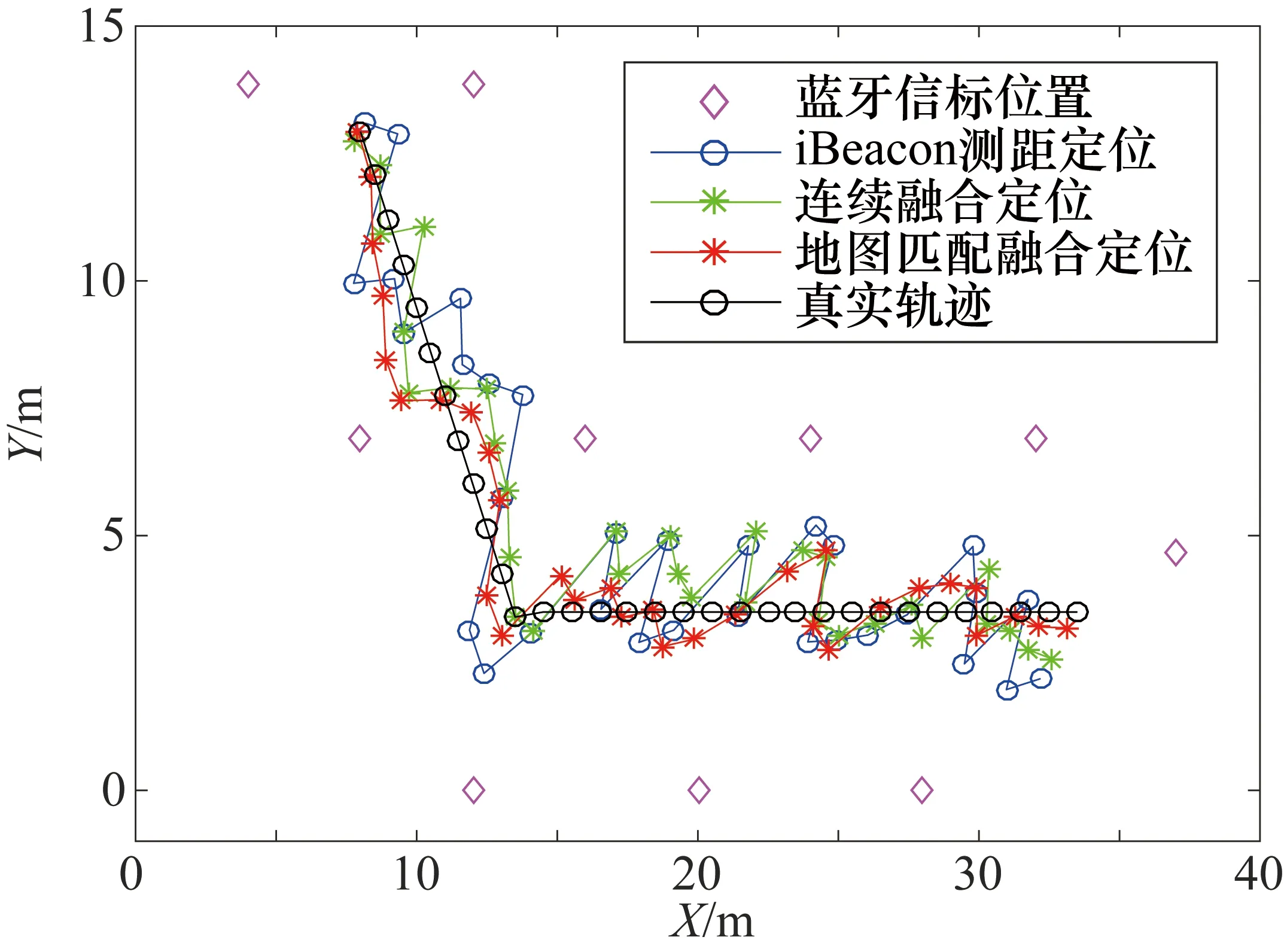
图9 多种定位算法走行轨迹图
4 结束语
针对枢纽机场环境下对旅航站楼内的旅客位置服务进行研究,主要是通过部署在机场航站楼内的iBeacon基站结合智能移动设备中的多传感器,在机场航站楼内的断点弱场和密集人流环境下面向行人设计航站楼内低成本的连续定位算法,进一步提高定位精度,随着现在移动通信网络的发展,如何将所用的定位技术与蜂窝定位技术进行有效融合也需要进行进一步研究。
